DECnet Networking Manual
- Operating System and Version:
- VSI OpenVMS IA-64 Version 8.4-1H1 or higher
VSI OpenVMS Alpha Version 8.4-2L1 or higher
Preface
1. About VSI
VMS Software, Inc. (VSI) is an independent software company licensed by Hewlett Packard Enterprise to develop and support the OpenVMS operating system.
2. Intended Audience
The VSI OpenVMS DECnet Networking Manual is intended for those who perform network management functions to control, monitor, or test DECnet–VAX and VAX P.S.I. software running on a VMS operating system. This manual is also intended for VMS users who perform remote file access or task-to-task operations using DECnet–VAX. You are assumed to be familiar with the VMS operating system, but not necessarily experienced with DECnet operations.
3. Document Structure
Chapter 1, "Overview of DECnet for OpenVMS" and Chapter 2, "DECnet for OpenVMS Components and Concepts" introduces you to basic networking concepts required to understand DECnet for OpenVMS operation, and indicates how you can interact with the network.
Chapter 3, "Managing and Monitoring the Network" and Chapter 4, "DECnet for OpenVMS Host Services" provides usage information to those responsible for DECnet for OpenVMS system management and explains how to use the Network Control Program to manage the network and perform host services to remote systems (such as downline loading and upline dumping).
Chapter 5, "Configuring a Network", Chapter 6, "Installation of a Network", and Chapter 7, "Testing the Network" specifies the procedures for configuring, installing, and testing DECnet for OpenVMS on a operating system.
Chapter 8, "Performing Network User Operations" and Chapter 9, "File Operations in a Heterogeneous Network Environment" describes the techniques for carrying out user operations over the network, including accessing remote files and performing task-to-task communications.
4. Related Documents
The networking concepts and operations described in the VSI OpenVMS DECnet Networking Manual are directly related to the following three manuals:
VSI OpenVMS DECnet Guide to Networking — Provides a conceptual overview of networking concepts and DECnet for OpenVMS.
VSI OpenVMS DECnet Network Management Utilities — Provides usage information for the Network Control Program (NCP) Utility, and information for testing the network using DECnet Test Sender/Receiver commands, formerly presented in a separate manual.
VMS DECnet Test Sender/DECnet Test Receiver Utility Manual is no longer a separate manual. It has been incorporated into the VSI OpenVMS DECnet Network Management Utilities.
See also the OpenVMS Release notes for the version you are running.
The following functional specifications define Network Architecture (DNA) protocols to which all implementations of DECnet Phase IV adhere:
- DECnet Network Architecture General Description
- Data Communications Message Protocol Functional Specification
- Network Services Protocol Functional Specification
- Maintenance Operation Protocol Functional Specification
- Data Access Protocol Functional Specification
- Routing Layer Functional Specification
- DNA Session Control Functional Specification
- DNA Phase IV Network Management Functional Specification
- Ethernet Node Product Architecture Specification
- Ethernet Data Link Functional Specification
5. VSI Encourages Your Comments
You may send comments or suggestions regarding this manual or any VSI document by sending electronic mail to the following Internet address: <docinfo@vmssoftware.com>. Users who have VSI OpenVMS support contracts through VSI can contact <support@vmssoftware.com> for help with this product.
6. OpenVMS Documentation
The full VSI OpenVMS documentation set can be found on the VMS Software Documentation webpage at https://docs.vmssoftware.com.
7. Conventions
|
Ctrl/x |
A sequence such as Ctrl/x indicates that you must hold down the key labeled Ctrl while you press another key or a pointing device button. |
|
PF1 x |
A sequence such as PF1 x indicates that you must first press and release the key labeled PF1, then press and release another key or a pointing device button. |
|
… |
In examples, a horizontal ellipsis indicates one of the
following possibilities:
|
|
⋮ |
A vertical ellipsis indicates the omission of items from a code example or command format; the items are omitted because they are not important to the topic being discussed. |
|
() |
In format descriptions, parentheses indicate that, if you choose more than one option, you must enclose the choices in parentheses. |
|
[] |
In format descriptions, brackets indicate that whatever is enclosed within the brackets is optional; you can select none, one, or all of the choices. (Brackets are not, however, optional in the syntax of a directory name in a file specification or in the syntax of a substring specification in an assignment statement.) |
|
{} |
In format descriptions, braces surround a required choice of options; you must choose one of the options listed. |
|
red ink |
Red ink indicates information that you must enter from the keyboard or a screen object that you must choose or click on. For online versions of the book, user input is shown in bold. |
|
boldface text |
Boldface text represents the introduction of a new term or the name of an argument, an attribute, or a reason. Boldface text is also used to show user input in online versions of the book. |
|
italic text |
Italic text represents information that can vary in system messages (for example, Internal error number). |
|
UPPERCASE TEXT |
Uppercase letters indicate that you must enter a command (for example, enter OPEN/READ), or they indicate the name of a routine, the name of a file, the name of a file protection code, or the abbreviation for a system privilege. |
|
- |
Hyphens in coding examples indicate that additional arguments to the request are provided on the line that follows. |
|
numbers |
Unless otherwise noted, all numbers in the text are assumed to be decimal. Nondecimal radixes—binary, octal, or hexadecimal—are explicitly indicated. |
Chapter 1. Overview of DECnet for OpenVMS
This chapter presents an overview of the DECnet for OpenVMS networking software which enables access to the DECnet network: what the software is, how to manage it, and how to interface with it.
The following sections introduce the network terms and concepts used throughout this manual, identify network software, describe network configurations, and provide a brief summary of network management responsibilities. The chapter also defines the application user’s relationship to the network.
1.1. General Description of a DECnet Network
Computer processes communicate with one another over a data network. This network consists of two or more computer systems called nodes and the logical links between them. A logical link is a connection, at the user level, between two processes. Adjacent nodes are connected by physical lines over which circuits operate. A circuit is a communications data path over which all input and output (I/O) between nodes takes place. A circuit can support many concurrent logical links.
In a network of more than two nodes, the process of directing a data message from a source to a destination node through intermediate nodes is called routing. DECnet supports adaptive routing, which permits messages to be routed through the network over the most cost-effective path; messages are rerouted automatically if a circuit becomes disabled.
Nodes can be either routing nodes (called routers) or nonrouting nodes (known as end nodes). Both routing nodes and end nodes can send messages to and receive messages from other nodes in the network. However, routing nodes have the ability to forward or route messages from one node to another when the two nodes exchanging these messages have no direct physical link between them.
Note
Not all hardware platforms support routing. Check the DECnet for OpenVMS Software Product Description to determine if routing is supported on your hardware platform.
End nodes can never have more than one active circuit connecting them with the network. Any node that has two or more active circuits connecting it to the network must be a router.
Phase IV DECnet supports the configuration of very large, as well as small, networks. In a network that is not divided into multiple areas, a maximum of 1023 nodes is possible. Area routing techniques permit configuration of very large networks, consisting of up to 63 areas, each containing a maximum of 1023 nodes. In a multiple-area network, nodes are grouped into separate areas, each functioning as a subnetwork. DECnet supports routing within each area and a second, higher level of routing that links the areas. Nodes that perform routing within a single area are referred to as level 1 routers; those that perform routing between areas as well as within their own area are called level 2 routers (or area routers).
1.1.1. DECnet Interface with the Operating System
DECnet is the collective name for the software and hardware products that are a means for various VSI operating systems to participate in a network. DECnet for OpenVMS is the implementation of DECnet that allows an OpenVMS operating system to function as a network node. As the network interface, DECnet supports both the protocols necessary for communicating over the network and the functions necessary for configuring, controlling, and monitoring the network. In a network, any DECnet node can communicate with any other DECnet node, regardless of their operating systems.
A DECnet multinode network is decentralized; that is, many nodes connected to the network can communicate with each other without having to go through a central node. As a member of a multinode network, your node can communicate with any other network node, not merely the nodes that reside next to you, and gain access to software facilities that may not exist on your local node. An advantage of this type of network is that it allows different applications running on separate nodes to share the facilities of any other node.
Optionally, very large DECnet networks can be divided into multiple areas, for the purpose of hierarchical (area) routing. Area routing introduces a second, higher level of routing between areas (groups of nodes), which results in less routing traffic throughout the network. Each node in a multiple-area network can still communicate with all other nodes in the network.
1.1.2. DECnet Functions
- Network management functions
Controlling the network (Chapter 2, "DECnet for OpenVMS Components and Concepts" through Chapter 7, "Testing the Network")
Providing DECnet for OpenVMS host services to other DECnet nodes (Chapter 4, "DECnet for OpenVMS Host Services")
Performing routing configuration and control (Chapter 2, "DECnet for OpenVMS Components and Concepts" and Chapter 3, "Managing and Monitoring the Network")
Establishing DECnet configurations (Chapter 2, "DECnet for OpenVMS Components and Concepts", Chapter 3, "Managing and Monitoring the Network", and Chapter 5, "Configuring a Network")
- Applications user functions
Accessing files across the network (Chapter 8, "Performing Network User Operations" and Chapter 9, "File Operations in a Heterogeneous Network Environment")
Using a heterogeneous command terminal (Chapter 8, "Performing Network User Operations")
Performing task-to-task communications across the network (Chapter 8, "Performing Network User Operations")
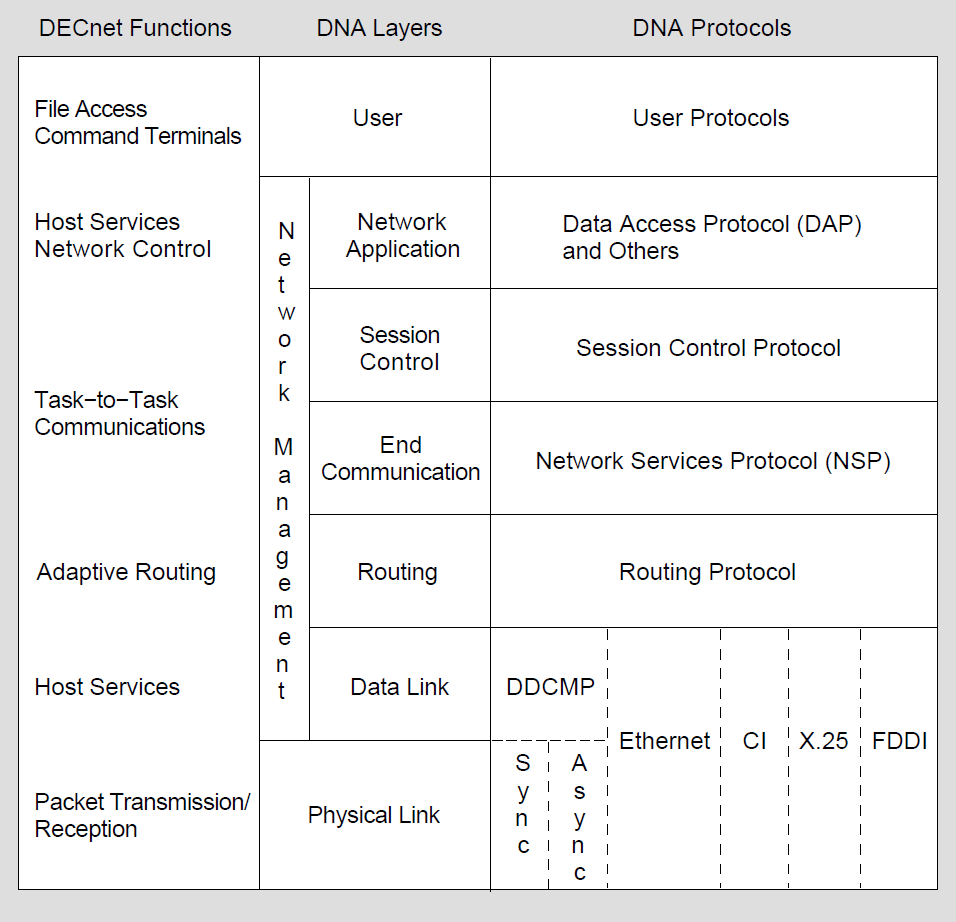
DECnet products are based on the layered network design specified in the Network Architecture (NA). Figure 1.1, ''DECnet Functions and Related DNA Layers and Protocols'' illustrates the DECnet functions, the various DNA layers at which they are initiated, and the DNA protocols by which these functions are implemented. Each DNA layer is a client of the next lower layer and does not function independently. For a complete description of DNA, see the DNA specifications. The DECnet for OpenVMS configurations that use the Ethernet, Fiber Distributed Data Interface (FDDI), DDCMP and CI protocols are defined in the following section.
1.2. DECnet for OpenVMS Configurations
DECnet for OpenVMS supports network connections for Ethernet and FDDI lines in a local area network (LAN) configuration.
On VAX, DECnet for OpenVMS software also supports network connections to the following:
A node running DECnet using the DDCMP, VSI’s data communications message protocol: either a synchronous point-to-point or multipoint connection, or an asynchronous static or dynamic point-to-point connection
Other nodes running DECnet over the computer interconnect (CI)
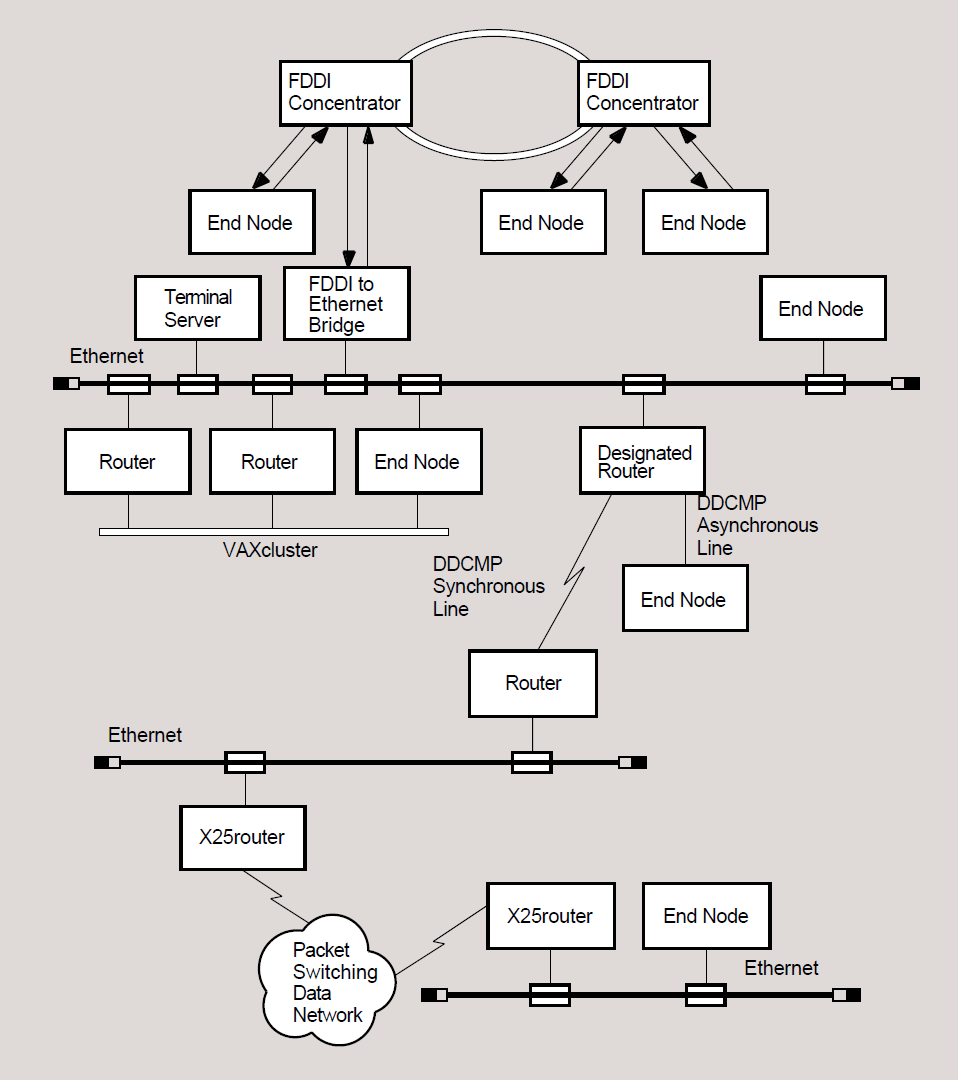
Figure 1.2, ''Sample DECnet for OpenVMS Phase IV Configuration'' illustrates a sample DECnet Phase IV configuration showing the following ways of connecting LANs:
An FDDI to Ethernet bridge connecting an FDDI LAN (top) to an Ethernet LAN.
A DDCMP synchronous line connecting two LANs.
A PSDN connecting two LANs via two X25 routers.
DECnet for OpenVMS connections are described in the following subsections. A detailed discussion of the various types of circuits and lines used in a DECnet network is presented in Chapter 2, "DECnet for OpenVMS Components and Concepts".
1.2.1. DECnet for OpenVMS Ethernet Local Area Network Configuration
The Ethernet is a Local Area Network (LAN) component that provides a reliable high-speed communications channel, optimized to connect information processing equipment in a limited geographic area, such as an office, a building, or a complex of buildings (for example, a campus).
LANs are designed to use a wide variety of technologies and arranged in many configurations. Digital Equipment Corporation, Intel Corporation, and Xerox Corporation collaborated in producing the Ethernet specification to develop a variety of LAN products. Digital's implementation of the Ethernet specification that was originated by the Xerox Corporation appears at the lowest two levels of the overall DNA specification: the Physical layer and the Data Link layer.
At the Physical layer, the Ethernet topology is a bus, in the shape of a branching tree, and the medium is a shielded coaxial cable that uses Manchester-encoded, digital baseband signaling. The maximum data rate is 10 million bits per second. Maximum use of an Ethernet's data transmission capability occurs when multiple pairs of nodes communicate simultaneously. In practice, DECnet transmission between a pair of nodes on an Ethernet occurs at a considerably lower rate. Each Ethernet can support up to 1023 nodes; the maximum possible distance between nodes on the Ethernet is 2.8 kilometers (1.74 miles).
Section 2.2.4, ''Ethernet Circuit Device'' lists the Ethernet circuit devices supported by DECnet for OpenVMS.
1.2.1.1. Ethernet Datagrams
Message packets sent over Ethernet are called datagrams. Because there is no guarantee that a datagram will be received by the intended destinations, reliable connections (in the form of virtual circuits) may be provided by a protocol being interposed between the user and the Ethernet datagram service. In DNA, this virtual circuit is provided by the Network Services Protocol (NSP) in the End Communication layer.
1.2.1.2. Transmission and Reception of Ethernet Packets
An Ethernet is a single shared network channel, with many nodes demanding equal access. The technique used to mediate these demands is Carrier Sense, Multiple Access with Collision Detect (CSMA/CD). CSMA/CD performs Ethernet Data Link layer access control.
The LAN term multiaccess refers to the ability of any station on the LAN to use the communications medium. On Ethernet, any station may begin transmitting if it senses that no other station is transmitting.
CSMA/CD is like a social gathering in that one person speaks at a time. Before speaking, one listens to determine if another person is speaking. If two or more people, detecting silence, begin speaking at the same time, they notice this and stop speaking. After a short interval, they each try to speak again. Because the length of this interval is randomly determined, usually one person starts before the other. The second person waits for the first to conclude.
The carrier sense function enables Ethernet stations to determine if the communication medium is already in use. Messages are said to be initially deferred if they are not sent on the Ethernet because a transmission is in progress.
If two or more stations begin transmitting at the same time, they detect this and stop transmitting. This is called collision detect. They wait for a random period of time before trying again; on Ethernet, this situation is known as backoff and retransmission, and a random delay before retransmission eventually clears the collision situation.
While Ethernet stations can hear every message, some messages are intended for all stations (broadcast address), some are intended for a subset (multicast address), and some are intended for individual stations (physical address).
1.2.2. FDDI Local Area Network Configuration
A Fiber Distributed Data Interface LAN offers 100 Mb/s network communications.
FDDI provides a reliable high-speed communications channel, optimized to connect information processing equipment in a limited geographic area, such as an office, a building, or a complex of buildings (for example, a campus).
FDDI can operate as a dedicated communications channel or interoperate with existing IEEE 802.3/Ethernet products as a high-speed backbone supporting one or more mid-speed IEEE 802.3/Ethernet subnetworks. As implemented by
VSI, the FDDI physical layer has the following features:
A dual ring of trees topology; using one ring as the primary ring, the second ring as a backup, and the tree for increased network flexibilty, manageability, and availability.
Multimode and single-mode fiber optic cable for the transmission medium.
Reliable light emitting diodes (LEDs) as the optical transmitters, photo diodes (PINs) as the optical receivers for multimode fiber, and laser technology for single-mode fiber transmission.
A maximum of 500 network devices, a maximum ring circumference of 100 km (62 miles), a maximum distance between multimode fiber stations of 2 km (1.2 miles) for flexible network connections and configurations, and 40 km (25 miles) distance between stations using single-mode fiber.
1.2.2.1. The FDDI Data Link Layer
The FDDI Data Link layer uses a timed token-passing protocol. The FDDI Data Link layer is divided into two sublayers: Media Access Control (MAC) and Logical Link Control (LLC).
FDDI requires LLC for proper ring operation. The LLC sublayer resides above the MAC sublayer. LLC controls the transmission of a frame of data between two nodes. LLC frames carry user information between nodes on an FDDI or other network. Each FDDI frame containing user data includes LLC information for the destination node. These frames cross bridges and can be transmitted to nodes on the extended LAN.
MAC functions include the following:
Delivering of LLC frames
Constructing MAC frames and tokens
Sending, receiving, repeating, and removing MAC frames from the ring
Fair and equal access to the ring through use of the timed token
Communicating between attached devices using frames and tokens
Ring initialization (claim process)
Ring fault isolation (beacon process)
1.2.2.2. FDDI Ring Operation
To gain the right to transmit on the FDDI LAN, stations must first acquire the token, which is a unique symbol sequence that circulates around the ring following a data transmission. Once a station acquires the token, it removes the token from the ring and begins transmitting data. At the end of tranmission, the station issues a new token onto the ring, providing other stations with the opportunity to transmit.
In VSI’s FDDI implementation, all attached stations use asynchronous data transmission to pass data around the ring. In asynchronous transmission, all attached stations are dynamically allocated a transmission time based on the TTRT. Stations acquire the token and transmit until the token holding time expires.
1.2.3. LAN Routers and End Nodes
Local Area Networks support connections to routers and end nodes. On a LAN, a routing node selected as a designated router can perform routing services on behalf of end nodes. In addition, routers can route packets between LAN nodes and non-LAN nodes (such as nodes on DDCMP circuits). An end node on a LAN can communicate directly with any other node (router or end node) on the same LAN by sending a message directly to the addressed node. An end node on a non-LAN circuit can communicate only with an adjacent node on the same circuit.
Not all hardware platforms support network routing. Refer to the DECnet for OpenVMS Software Product Description to determine if routing is suppported.
1.2.4. DDCMP Network Configurations
On systems that support it, DDCMP provides a low-level communications path between systems. The DDCMP protocol performs the basic communications function of moving information blocks over an unreliable communication channel. (The protocol detects any bit errors introduced by the channel and requests retransmission of the block.) You also use DDCMP to manage the orderly transmission and reception of blocks on channels with one or more transmitters and receivers.
The DDCMP protocol is supported on synchronous and asynchronous communications devices. DDCMP connections can be point-to-point or multipoint configurations. Point-to-point connections are either synchronous or asynchronous. The two types of asynchronous connections are static (permanent) and dynamic (switched temporary). Multipoint connections are always synchronous. These connections are described in the following section.
1.2.4.1. DDCMP Point-to-Point and Multipoint Connections
A point-to-point configuration consists of two systems connected by a single communication channel. Figure 1.3, ''DDCMP Point-to-Point and Multipoint Connections'' illustrates DDCMP point-to-point and multipoint configurations.
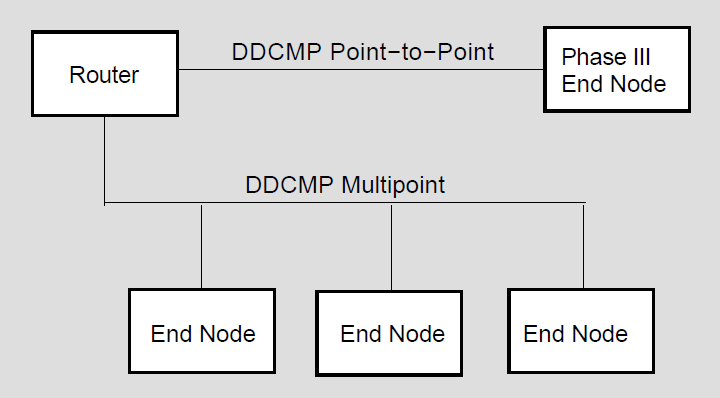
A multipoint configuration consists of two or more systems connected by a communications channel, with one of the systems (called the control station) controlling the channel. All other systems on the communications channel are known as tributaries. (Note that, if only two systems are connected in a multipoint configuration, one is the master and one is the tributary. However, this is not a very efficient use of the communication channel.) The control station is responsible for telling the tributaries, in turn, when they may use the channel; this procedure is known as polling. Tributaries are not allowed to use the channel until they are polled. The control station, however, may use the channel whenever it is available. Also, the tributaries on a multipoint line are not allowed to communicate directly with each other, but only through the master.
Point-to-point circuits and multipoint circuits perform as virtual circuits. Nodes on these circuits interact as though a specific circuit were dedicated to them throughout the transmission. However, the actual physical connection is allocated by the routing mechanism. Initialization of nodes on DDCMP circuits involves guaranteed delivery of routing messages. Also, individual nodes on DDCMP circuits must be addressed directly; no multicast or broadcast addressing capability is available as with an Ethernet or FDDI circuit.
1.2.4.2. Synchronous DDCMP Connections
You use synchronous communications devices for high-speed point-to-point or multipoint communication (for example, connecting two VAX–11/780 systems).
The synchronous DDCMP protocol can run in full- or half-duplex operation. This allows DDCMP the flexibility of being used for local synchronous communications, or for remote synchronous communications over a telephone line using a modem. DDCMP has been implemented in microcode in such devices as the DMC11 and DMR11 to run at speeds up to one megabit per second in a point-to-point configuration. The DDCMP multipoint protocol (point-to-point also) has been implemented in microcode in the DMP11 device to run at speeds up to 500 kilobits per second. For the DMF32, DDCMP has been implemented in the driver software for the synchronous communications port.
1.2.4.3. Asynchronous DDCMP Connections
Asynchronous connections provide for low-speed, low-cost, point-to-point communication (for example, as an inexpensive way of connecting a MicroVAX system to a VAX–8000 series system). Asynchronous DDCMP is implemented in software and can be run over any directly connected terminal line that the VMS system supports. The asynchronous DDCMP protocol provides for a full-duplex connection and can be used for remote asynchronous communications over a telephone line using a modem. Asynchronous connections are not supported for maintenance operations or for controller loopback testing.
A static connection: the asynchronous line is permanently configured as a communications device
A dynamic connection: a line connected to a terminal port is switched to an asynchronous communications line for the duration of a call
1.2.4.4. Static Asynchronous Connections
A static asynchronous DDCMP connection is a permanent DECnet connection between two nodes physically connected by terminal lines. You convert the terminal lines to static asynchronous DDCMP lines by issuing commands to set the lines to support the DDCMP protocol. The user at each node then turns the appropriate circuits and lines on for DECnet use. After the communications link is established, it remains available until a user turns off the circuit and line and clears the entries from the DECnet database.
Static asynchronous DDCMP configurations require the asynchronous DDCMP driver to be connected. The asynchronous DDCMP protocol can run in full-duplex operation on local asynchronous communication devices. Examples of these devices are the DZ11 and the DMF32 asynchronous communications port.
You can configure a dialup line as either a static or dynamic asynchronous line, but may find the dynamic connection more secure and convenient to use.
1.2.4.5. Dynamic Asynchronous Connections
A dynamic asynchronous connection is a temporary connection between two nodes, generally over a telephone line using modems. The terminal lines at both ends of the connection can be switched to asynchronous DDCMP communications lines and then switched back to terminal lines.
You can use dynamic asynchronous connections to establish a DECnet link to another computer for a limited time or to create links to different computers at different times.
For example, as a user of a personal computer (non-VMS), you can cause a dynamic asynchronous connection to be made for the length of the telephone call to a VAX–8000 series system. First establish a process on your system as a terminal emulator (enabling the remote connection to look like a local connection). You dial in over a telephone line to a process on the other system (which is established as a virtual terminal) and log in. You can then enter a command that causes the terminal lines at each end of the connection to be switched to DDCMP mode for DECnet use. When you hang up the telephone or turn off the circuit, the lines are automatically switched back to terminal lines.
Security measures provide protection against a caller at an unauthorized node forming a dynamic asynchronous connection with another node (see Section 2.8.6, ''Security for DDCMP Point-to-Point Connections''). Before a dialup node can establish a dynamic connection with a remote node, the remote node verifies that the dialup node is authorized to make a connection. It checks that the node is of the appropriate type (router or end node), and, without revealing its own password, verifies the routing initialization password sent by the dialup node. Also, for increased security, the connection is ended automatically when the telephone is hung up, if your modem and system are set up and wired to enable this to occur..
You can establish a dynamic asynchronous connection over a hardwired terminal line. The connection is maintained for the duration of the DECnet session. The dynamic connection permits the system to be used as a terminal emulator when not switched to DECnet use.
1.2.5. Configurations for VMSclusters
A VMScluster is an organization of systems that communicate over a high-speedv communications path and share processor resources as well as disk storage.
DECnet connections are required for all systems in the cluster. Use of DECnet ensures that cluster system managers can access each node in the cluster from a single terminal, even if terminal-switching facilities are not available. DECnet is also required by the User Environment Test Package (UETP).
The choices for DECnet physical links for use in the cluster are as follows:
Connecting each node in the cluster to an Ethernet or FDDI LAN.
Using the CI that connects VAXcluster nodes as the DECnet for OpenVMS data link. The CI cables from the individual nodes in the cluster are connected to a star coupler.
Connecting each cluster node to a LAN provides distinct advantages:
Each node in the cluster can be an end node, resulting in lower overhead for these nodes, decreased routing traffic throughout the network, and simpler installation procedures. To route to systems off the LAN, there must be at least one router on the LAN to which the cluster end nodes are attached.
A LAN provides better performance in DECnet transmissions than the CI, despite the higher data link bandwidth of the CI, because the LAN communications protocols allow larger buffer sizes. FDDI provides better performance in DECnet transmission than either CI or Ethernet.
Terminal servers can be used when nodes in a cluster are connected to an Ethernet. VSI’s terminal servers offer a number of benefits to the cluster user, such as load balancing and easier cluster management.
In order to use a cluster alias, at least one cluster member must be configured as a router.
A cluster node connected to a LAN may require additional DECnet lines in order to communicate with remote nodes not on the local area network. Configure a cluster node connected to more than one DECnet line as a router to pass communications between an off-LAN node and other nodes on the network.
1.2.5.1. Using the CI in a VAXcluster
If you use only one physical link to connect each VAXcluster node to the network, use the Ethernet or FDDI link instead of the CI data link, to get better performance. In this case, the CI should perform the functions of a system bus and not be enabled as a DECnet data link.
If the nodes in the cluster are not connected to a LAN, use the CI as the DECnet data link between the nodes. CI circuit devices are configured as though they were multipoint devices, but each node on the CI can talk directly to every other node and no polling is involved.
Configure at least one node as a router if more than two cluster nodes use the CI to communicate. If the VAXcluster has two nodes, both can be end nodes. For a cluster of four or more nodes, configure at least two routers to prevent the loss of communications capability between the remaining nodes if one router fails. Also, you can provide backup circuits between end nodes in case of router failure.
1.2.5.2. Configuring an Alias Node Identifier
You can configure a VMScluster so that the whole cluster appears to other network nodes as though it were a single node, with an address different from that of any DECnet node within the cluster. This address usually has a node name associated with it. Thus, you can access the cluster as a whole by an alias node identifier, which can be either its node name or its node address.
All or some of the nodes in a cluster can elect to use this special node identifier as an alias, while retaining their unique individual node names and addresses.
Each node that assumes the alias node identifier can specify whether it will accept incoming connections directed to the alias address. It can also specify the network services for which the cluster alias node identifier is to be used on outgoing connections and the network services that will accept incoming calls.
At least one of the nodes in the cluster that uses the alias node identifier must be a router. The router informs other nodes in the network of the alias node address for the cluster. When the router receives packets addressed to the alias node address, it forwards them to the appropriate nodes in the cluster. The cluster alias node identifier can be very useful in network operations involving shareable resources. Network users outside the cluster can access cluster resources without knowing which nodes are active in the cluster. For example, if a user on a cluster node sends a MAIL message, it does not matter whether that particular node is active when a reply to the message is received.
1.3. Managing the Network
As system manager of a VMS operating system, you can use a network management utility program to configure the system as a DECnet for OpenVMS node in the network, and perform network management and maintenance functions for your own node and other nodes in the network. The following subsections summarize network management functions.
1.3.1. Network Control Program
Use the Network Control Program (NCP) utility to configure, control, monitor, and test the network.
The network components the system manager configures are listed in Section 1.3.5, ''Configuring a Network'' and described in detail in Chapter 2, "DECnet for OpenVMS Components and Concepts". Chapter 3, "Managing and Monitoring the Network" discusses how to use NCP commands and parameters to perform network management. The NCP commands and parameters and guidelines for using them, including restrictions on the use of individual NCP parameters, are specified in the VSI OpenVMS DECnet Network Management Utilities.
1.3.2. Network Management Responsibilities
Defining network components and their parameters in a central configuration database at the local node and, optionally, at remote nodes. (The local node is the node at which you are physically located; a remote node is any node other than the local node in your network.)
Coordinating with the system managers of other nodes in the network to ensure uniform assumptions about network parameter settings such as circuit cost.
Configuring your node to ensure proper network routing operation.
Controlling and monitoring local and remote network operation.
Testing network hardware and software operation.
Loading systems downline to unattended remote nodes.
Connecting to an unattended remote node to serve as its console.
The following sections outline the network-related tasks that you perform as system manager and describes several of the facilities DECnet for OpenVMS provides to perform those tasks.
1.3.3. DECnet for OpenVMS Licenses and Keys
To enable your node to communicate with other nodes in the DECnet network, you need a DECnet for OpenVMS license and key. Purchase either a full function or an end node license, and enable the license by registering the appropriate DECnet for OpenVMS key on your system. You register DECnet for OpenVMS keys by using the License Management Facility (LMF). To register the key, you use the License Management Utility (LICENSE) to enter the information from the LMF Product Authorization Key (PAK).
The DECnet full function key allows the node on which it is enabled to be configured as either a routing node or an end node. The end node key permits the use of the DECnet end node capability only. An upgrade from end node to full function license is available, provided you have a hardware platform on which routing is supported.
1.3.4. DECnet for OpenVMS Network Management Software
Figure 1.4, ''DECnet for OpenVMS and VAX P.S.I. Software'' displays the DECnet for OpenVMS software that the system manager uses to configure, control, and monitor the network.
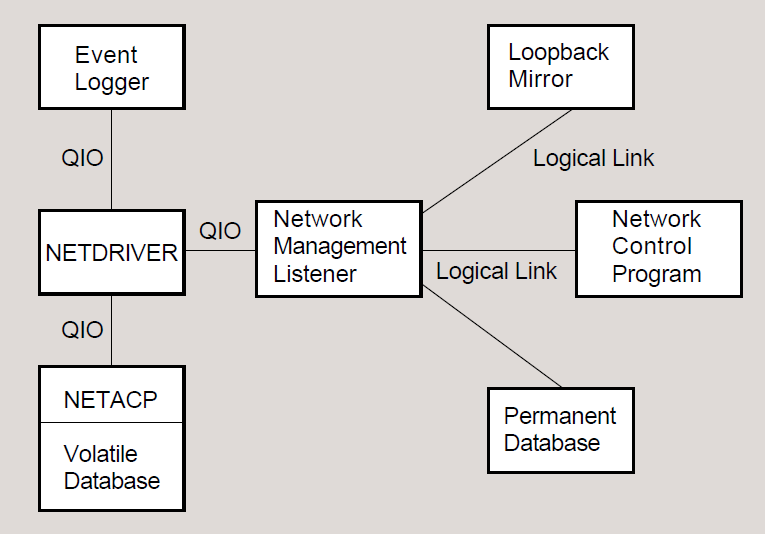
Ethernet configurator module (NICONFIG), a network image that listens to system identification messages on Ethernet circuits, and maintains a user-accessible database of configuration information on all systems on the Ethernet.
Event logger (EVL), an image that logs significant events to provide information to the system manager for possible intervention or future reference.
File access listener (FAL), a network image that receives and processes remote file access requests for files at its node on behalf of remote users.
Host loader (HLD), an image that communicates with the DECnet–RSX Satellite Loader (SLD) to load tasks downline to an RSX–11S node.
Loopback mirror (MIRROR), a network image that participates in Network Service Protocol (NSP) and Routing layer loopback testing.
Network ancillary control process (NETACP), an ancillary control process that controls all lines and circuits, maintains a picture of the network topology, and creates a process to receive inbound logical link connection requests.
Network Control Program (NCP), an interactive utility program that permits you to control and monitor the network.
Network driver (NETDRIVER), a pseudo-device driver that provides logical link and routing services. It implements NSP and Routing, and provides a user process with a Queue I/O (QIO) interface to a logical link service.
Network management listener (NML), an image that receives network management commands, such as NCP commands, from the Network Management layer through the Network Information and Control Exchange (NICE) protocol. NML performs all local network management functions as well as control and information functions requested by remote nodes. NML spawns a subprocess, the maintenance operation module (MOM), for maintenance functions such as downline load, upline dump, and loopback testing.
Permanent database, a collection of disk-resident files that define the network as known to the local node.
A volatile database, maintained by NETACP, is memory-resident and contains current network configuration parameters.
Many of these software components are user-transparent. This manual describes them only as they serve to highlight and clarify the functions and operation of NCP. The DNA specifications describe the different protocols that facilitate network communication.
1.3.5. Configuring a Network
The system manager must configure each DECnet node as part of the network.
Check the DECnet for OpenVMS Software Product Description to determine if routing is supported on your processor.
1.3.5.1. Configuring a DECnet for OpenVMS Node
At the outset, the system manager is responsible for configuring the network from the perspective of local node network operation. This involves supplying information at the local node about various network components such as nodes, circuits, lines, and objects. This information constitutes the configuration databases for the local node. Each node in the network has configuration databases. You supply information about the configuration databases through NCP.
If you are configuring a DECnet for OpenVMS node for the first time or want to completely rebuild the configuration databases for your local node, you can use the interactive NETCONFIG.COM procedure in SYS$MANAGER to configure your node.
If supplied on your system, you can use the interactive NETCONFIG_ UPDATE.COM procedure in SYS$UPDATE to alter your system’s default access options for network objects. The NETCONFIG_UPDATE.COM procedure performs no other network configuration. When you use the NETCONFIG_UPDATE.COM procedure to specify changes to default access for network objects, everything else in the configuration database remains unchanged.
To update an existing node database to contain current information about other nodes in the network, you can copy the information from the node database of another node to which you have access.
Chapter 3, "Managing and Monitoring the Network" discusses the function of the configuration database and the general use of NCP and most NCP commands. Chapter 5, "Configuring a Network" describes how to use the NETCONFIG.COM procedure to configure your node, and presents sample configuration commands for various network configurations. The VSI OpenVMS DECnet Network Management Utilities contains a summary description of NCP operation, command prompting, and the syntax of all NCP commands.
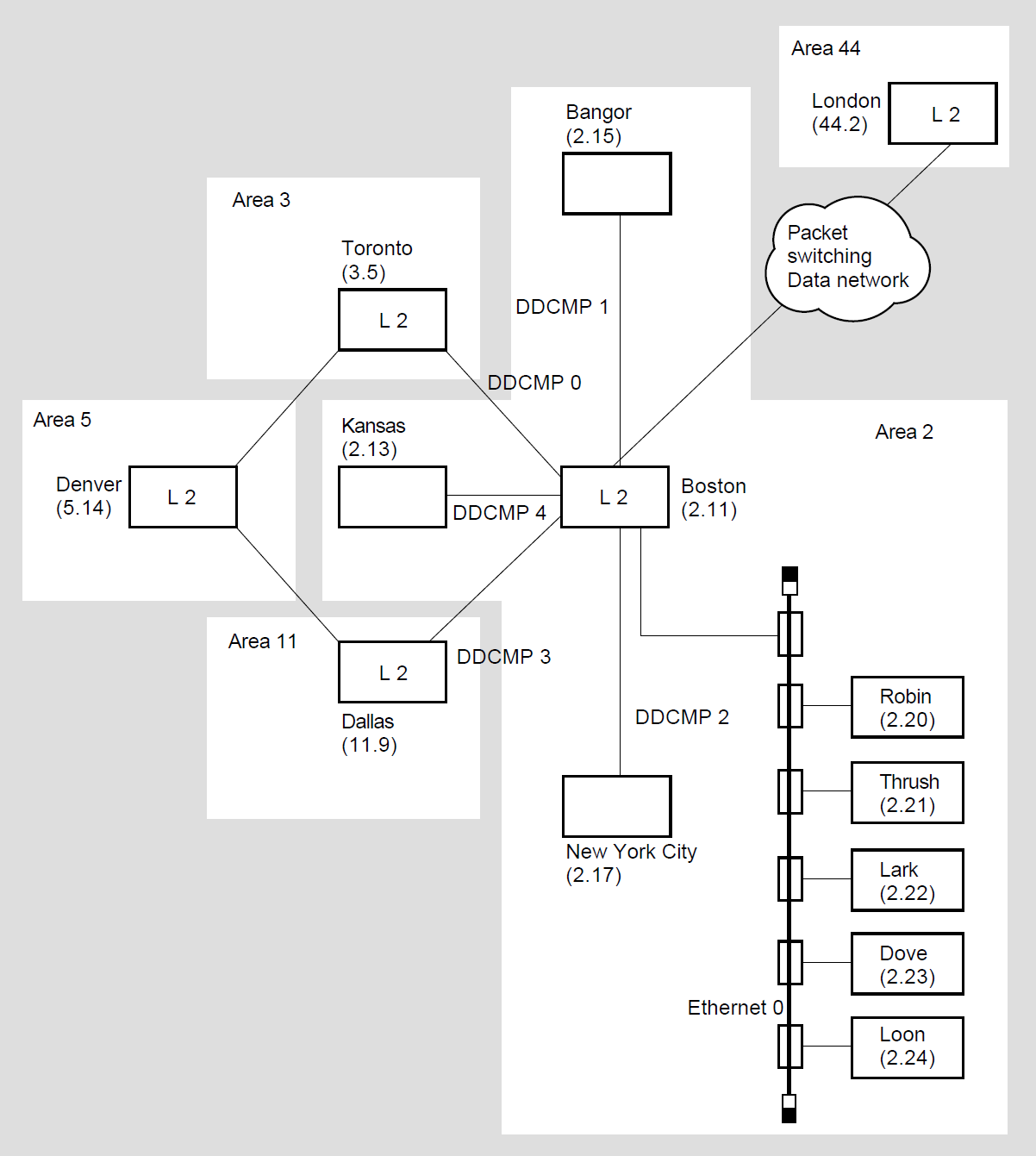
1.3.5.2. A Network Topology
Figure 1.5, ''Topology of a Single-Area DECnet Network'' illustrates a hypothetical network topology in a single area. Figure 1.6, ''Topology of a Multiple-Area DECnet Network'' illustrates the same topology for a network that has been divided into multiple areas. These configurations are referred to as the "network examples" throughout this manual.
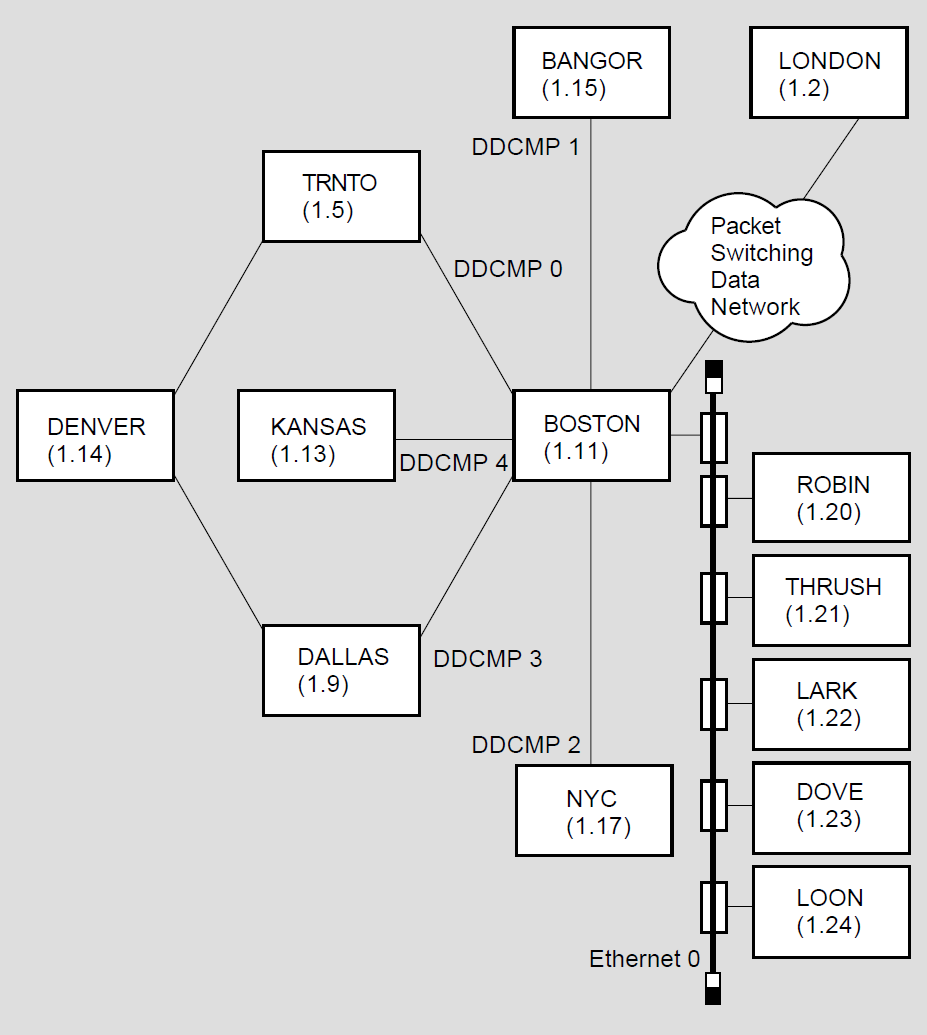
Nodes. Nodes are VSI operating systems using DECnet software to communicate with other operating systems across the network.
Circuits. Circuits are virtual communications paths between nodes. Circuits operate over physical lines and are the medium on which all I/O occurs. DECnet processes "talk" over circuits by means of logical links. These links carry a single stream of full-duplex traffic between two user-level processes. There can be multiple logical links on each DECnet circuit.
Lines. Lines are physical data paths between nodes.
Objects. Objects are associated with processes that receive logical link requests. They perform specific network functions. An example is FAL, which is used for remote file access.
Logging. Logging is a network feature that enables the automatic recording of useful network events that occur during network operation.
The Ethernet configurator module. It lists all nodes on the Ethernet.
These components, the DECnet software modules and databases, and the hardware make up the network. NCP command examples in this manual relate to the components illustrated in the network example.
1.4. User Interface to the Network
This section describes the user interface to the DECnet for OpenVMS network. It includes a general description of operations that you can perform over the network and a list of the programming languages that you can use for designing network applications. The following sections present general information that you need to know to access the DECnet for OpenVMS network.
1.4.1. Performing Network Operations
Manipulate files on remote nodes (for example, transfer, delete, or rename files).
Access remote files at the record level.
Perform task-to-task communications.
DECnet for OpenVMS allows you to access files on remote nodes as though they were on your local node. It also allows you to design applications that communicate with each other over the network. For detailed information about remote file access and task-to-task communication, including examples of each type of network application, see Chapter 8, "Performing Network User Operations".
Throughout this document, the term task refers to an image running in the context of a process, the term local refers to the node at which you are located physically, and the term remote refers to the node with which you establish a connection. Note that, in certain situations such as testing, you can establish a logical link between two processes on the same node.
The VMS operating system and DECnet for OpenVMS communications software are integrated to provide a high degree of transparency for user operations. For some applications, however, it is desirable (and sometimes necessary) to have more direct access to network-specific information and operations. For this purpose, DECnet for OpenVMS provides nontransparent communication.
The following sections describe some of the general transparent and nontransparent features of DECnet for OpenVMS in terms of the user interface to the network. For more detailed information, including examples of transparent and nontransparent DECnet for OpenVMS applications, see Chapter 8, "Performing Network User Operations".
In addition to remote file access and task-to-task communication, DECnet for OpenVMS also allows you to communicate with remote nodes through the heterogeneous command terminal facility (SET HOST), described in Chapter 8, "Performing Network User Operations".
When designing user applications to perform network operations, you can use standard DCL commands, higher-level language I/O statements, VMS RMS service calls, and system service calls.
1.4.1.1. Designing User Applications for Network Operations
DECnet for OpenVMS supports network applications programming to access remote files and create tasks that exchange information across the network. You can use:
DCL commands and command procedures
Programs written in high-level languages with I/O statements that support RMS network access
Programs using RMS service calls or system service calls
| Programming Interface | Network Operation |
|---|---|
|
DCL commands |
Network command terminals Remote file manipulation Task-to-task communication |
| I/O statements |
Remote file access (files and records) Task-to-task communication |
|
RMS service calls |
Remote file access (files and records) Task-to-task communication |
|
System service calls |
Task-to-task communication |
1.4.1.2. Choosing a Language for a Specific Network Application
The way you access the network is directly related to the language you use and the network operation you perform.
For example, you may want to use standard VMS RMS calls in a VAX MACRO program to access remote files, then use system service calls to communicate between MACRO programs in a task-to-task communication application.
Figure 1.7, ''DECnet for OpenVMS Programming Interfaces and Network Access Types'' shows three access levels and the corresponding network operations. The various levels of network access provide a convenient context in which to discuss typical user operations over the network.
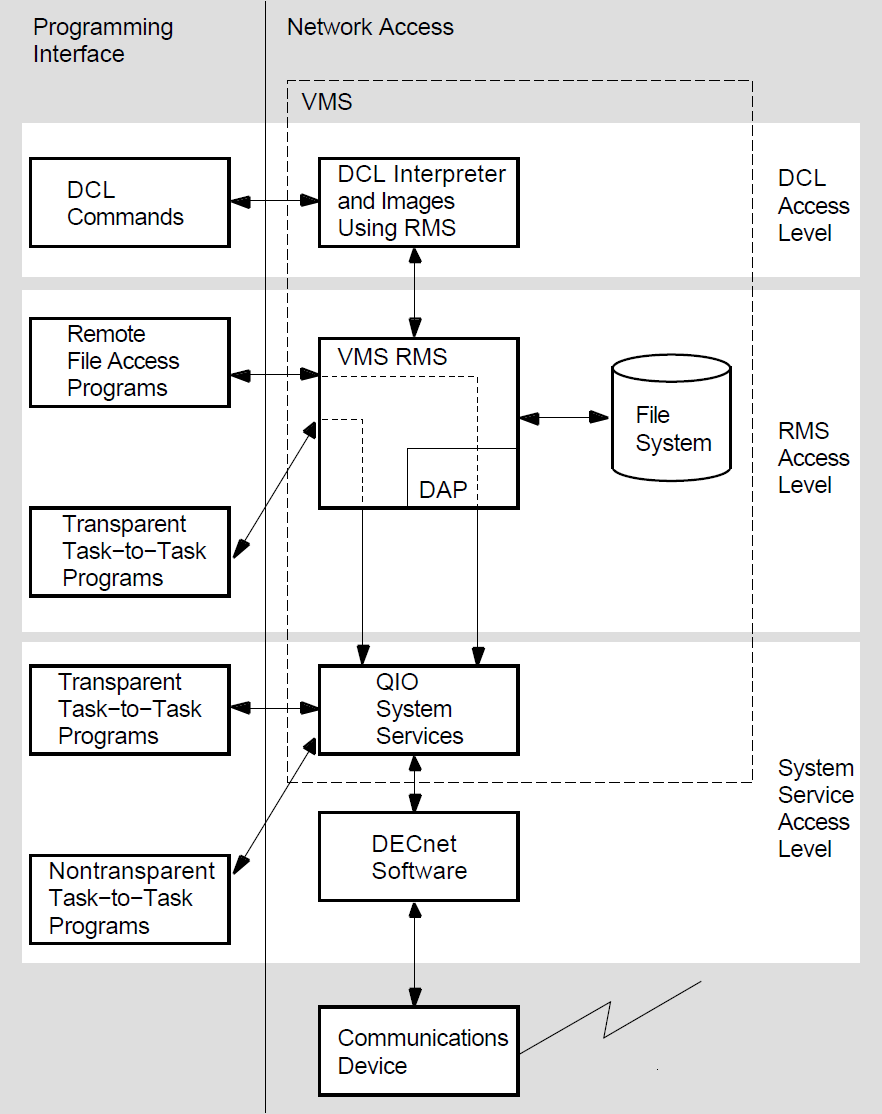
DCL and RMS are entirely transparent to the network user. Because you use standard DCL commands and RMS service calls to access remote files, no DECnet-specific calls are required at these levels of access. You need only specify in your file specification the remote node on which the file resides. Likewise, higher-level language tasks can use a variation of the standard OpenVMS file specification in conjunction with standard I/O statements to access remote tasks and exchange information; thus, this form of task-to-task communication is also transparent. As with device-independent I/O operations, transparent network access allows you to move data across the network with little concern for the way this operation is performed.
System services provide both a transparent and a nontransparent user interface to the network. Transparent communication at the system-service level provides all the basic functions necessary for two tasks to exchange messages over the network. As with the higher-level language I/O interface, these operations are transparent because they do not require DECnet-specific calls. Rather, you use standard system service calls to implement them. Nontransparent communication extends this basic set of functions to allow a nontransparent task to receive multiple inbound connections and to use additional network protocol features such as optional user data and interrupt messages. As with devicedependent I/O, nontransparent communication allows you to exploit certain network-specific characteristics to coordinate a more controlled communication environment for exchanging information.
1.4.2. Accessing the Network
This section presents general information that you need to know to access the network by means of DECnet for OpenVMS software. This information covers network file and task specifications, access control parameters, and how to use logical names in network applications.
The format for file specifications is applicable to file-handling operations for both the DCL and the RMS interfaces to the network. The task specification format pertains to task-to-task communication. The information on access control is significant because it defines the way that both local and remote nodes grant access to their system resources.
1.4.2.1. Using File and Task Specifications in Network Applications
TRNTO"SMITH JOHN"::WORK_DISK:TEST.DAT;1
This file specification contains explicit access control information and can be used to access the file TEST.DAT, which resides in user Smith's top-level directory on the device WORK_DISK on node TRNTO.
TRNTO::DBA1:[SMITH]TEST.DAT;1
For more information about file specification strings, including format examples, see the VSI OpenVMS User's Manual.
BOSTON::"TASK=TEST2"
BOSTON"JONES KC"::"0=TEST2"
This task specification string also identifies the task TEST2. Note that, in this case, explicit access control information is also included in the node specification string. For more information about task specifications, see Chapter 8, "Performing Network User Operations".
1.4.2.2. Using Access Control for Network Applications
Access control is the control that a node exercises over inbound logical link connections. The terms inbound and outbound refer to the direction of the logical link connection request. A node receives and processes inbound requests; it processes and sends outbound requests. This distinction is useful for discussing access control as it relates to VMS nodes in a network. If the node to which you want to connect is not on a VMS operating system, refer to appropriate DECnet documentation.
When DECnet software sends an outbound connection request in response to either a remote file access or a task-to-task communication operation, you may need certain access control information to connect successfully to the remote node and to log in. As in logging in at your local node, you can supply specific access control information in the form of a user name and password that the remote node recognizes. The remote node processes inbound connection requests containing this information to verify that you are a valid user of the system. For more information about inbound and outbound connection requests, see Section 2.8.2, ''System-Level Access Control''.
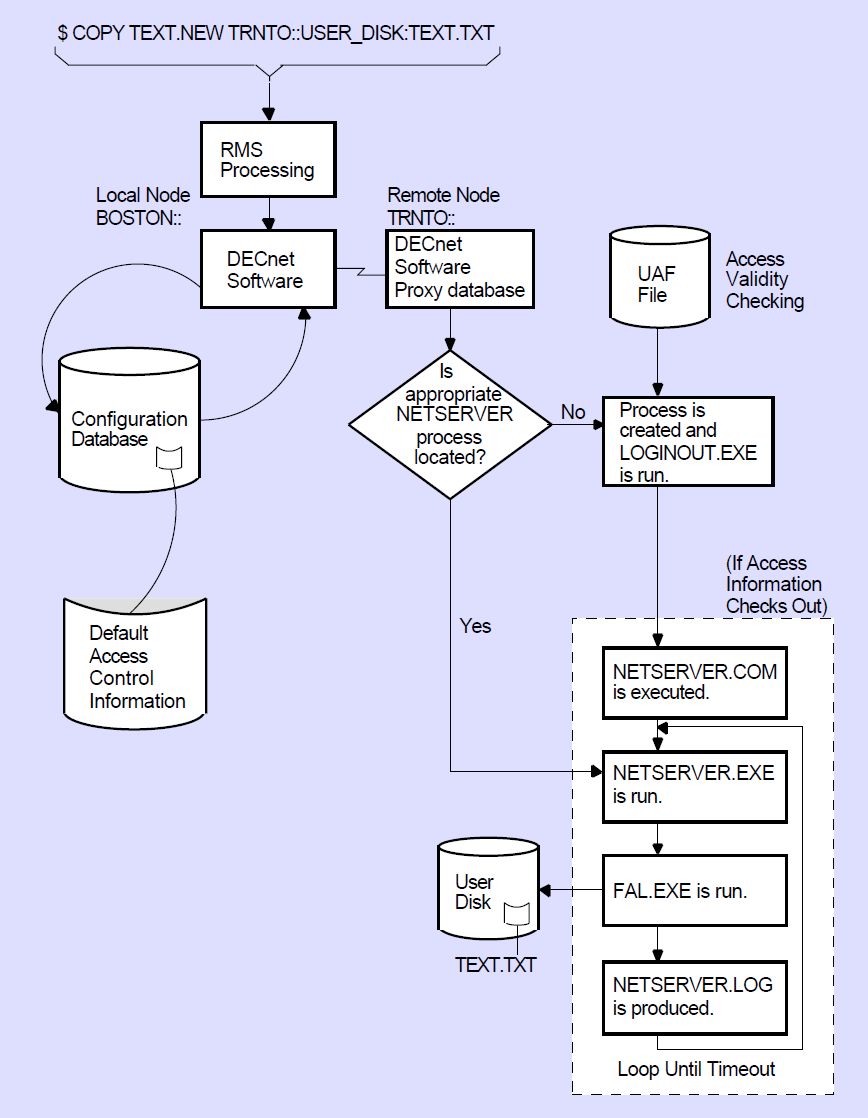
Figure 1.8, ''Remote File Access Using Access Control String Information'' illustrates the access control processing that takes place for a DCL command.
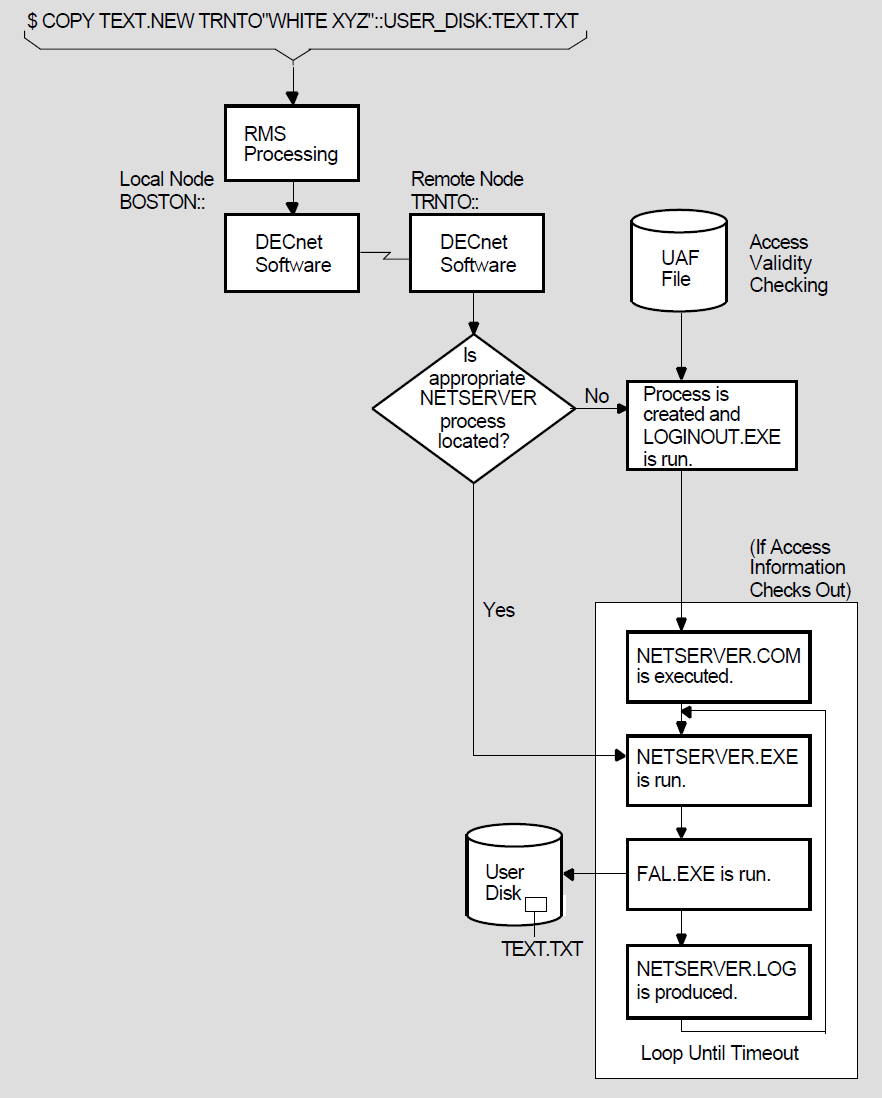
When you do not provide explicit access control information in the connection request, DECnet for OpenVMS software uses the remote node name specified in the connection request as a key to locate the appropriate record in the local configuration database. This record contains default access control information applicable to the remote node. Your system manager creates this entry when establishing the configuration database. (For additional information about the configuration database, refer to Chapter 3, "Managing and Monitoring the Network".)
Depending on the privileges required by the object to which you want to connect and those of the user process (see Figure 1.9, ''Remote File Access Using Default Access Control Information''), one of three possible sets of default access control information is sent to the remote node: default privileged, default nonprivileged, or null.
Because these defaults are node parameters, all privileged operations requested with default access control for a given node run under the same default account. The same is true for nonprivileged operations requested with default access control.
If the target node is running DECnet for OpenVMS, it can associate incoming connect requests with specific accounts other than a default nonprivileged DECnet account. See Section 2.6, ''Objects'' and Section 5.2.2, ''Using NETCONFIG.COM'' for details.
Figure 1.9, ''Remote File Access Using Default Access Control Information'' illustrates the access control processing that takes place for the same DCL command as in the example in Figure 1.8, ''Remote File Access Using Access Control String Information'', except that the DCL command does not specify an access control string.
1.4.2.3. Using Logical Names in Network Applications
Using logical names for network operations allows you to refer to network file and task specifications without using actual names that you give these elements. Logical names serve as a kind of shorthand for specifying all or a portion of a full file specification. By using logical names, you can pass file specifications defined at the DCL level to an executing image at runtime. For example, logical names allow a program to access local or remote files without changing the program. You can also use logical names to conceal access control information from other users by embedding it in a logical name defined in the process logical name table. Logical names provide convenient and powerful multilevel access control specification.
Both the device name and node name in a full file specification string can be logical names. After a node specification is encountered during file parsing, however, a device name that follows is not translated locally. Instead, it is passed unaltered to the remote node, where it is subject to logical name translation.
A logical name appearing in the device name position in a file specification can supply any file specification string elements when translated.
A logical name appearing in the node name position can supply only anode specification when translated. Therefore, its equivalence string must end with a double colon.
An access control string associated with a logical node name becomes the new access control string for the node-specification of the equivalence string, even if the node specification contained an access control string. Thus, you can easily specify a default (or override any) access control string defined for the node specification resulting from logical name translation.
After a logical node name is translated, the new node name becomes a candidate for logical node name translation.
A maximum of ten logical device name translations and ten logical node name translations is permitted. If you exceed these limits, an error message is returned.
While logical name translation is not done on the local node, merging the default name string (and related names) is accomplished locally.
For more information about logical names, including examples of logical names that can be used for network applications, see the VSI OpenVMS User's Manual.
Chapter 2. DECnet for OpenVMS Components and Concepts
This chapter presents networking concepts relevant to understanding the operation of the DECnet network, in terms of the DECnet for OpenVMS components.
To establish your system as part of the DECnet network, build and maintain a network configuration database, consisting of records that describe the specific network components your particular system requires. This chapter describes the DECnet for OpenVMS components and their characteristics: nodes,
Chapter 3, "Managing and Monitoring the Network"discusses how you can use a DECnet for OpenVMS utility program, the Network Control Program (NCP), to enter in your configuration database specific parameters for each network component your system will use.
2.1. Nodes
A node is an operating system that uses DECnet software to communicate with other operating systems across a network. An OpenVMS node uses DECnet for OpenVMS software to communicate with other DECnet nodes.
This section describes the characteristics of nodes and the kinds of parameters you can associate with them. Chapter 3, "Managing and Monitoring the Network" discusses how to use NCP commands to establish node parameters.
The system at which you are physically located is called the local node. By issuing network management commands at your local node, you can perform configuration, control, and monitoring functions that affect both the local node and other nodes in the network. The node on which network management functions are actually performed is called the executor node. Usually, the executor node is the local node. You have the option, however, of entering at the local node one or more commands to be executed at a remote node. For those commands, the remote node serves as the executor node.
2.1.1. DECnet Node Address and Name
To configure an operational network at the local node, establish configuration database entries for the local node and for all adjacent nodes that are connected by circuits. Specify names and addresses for all nodes in the network. After you have done so, you can reach any other node by its name.
area-number.node-number
| area-number | Is the number of the area in which the node resides. |
| node-number | Is the address of the node within that area. |
Each area number must be unique within the network and each node number unique within the area. If you do not specify the area number in a node address, the area number of a remote node defaults to the area number of the executor node, and the area number of the executor defaults to the number 1.
Node identification has two forms: a node address and a node name. A node address, a number in the format described previously, is assigned to each node in the configuration database. A node name is an optional alphanumeric string.
In the single-area network example, Figure 1.1, ''DECnet Functions and Related DNA Layers and Protocols'', the node assigned node address 1.11 is also identified by the node name BOSTON. For networks not divided into areas, the default area number is 1. In the multiple-area network example, Figure 1–6, node BOSTON in area 2 has the node address 2.11.
Because it is often easier to remember a name rather than an address, you may prefer to associate a name with an address. You can do so at any time. Note, however, that node names are known only to the local node network software while node addresses are known network-wide by the routing function. To avoid potential confusion, give each node a unique name that all nodes in the network will assign to that node and use to address it.
2.1.2. Hardware Addresses and Physical Addresses
Manufacturers permanently code every Ethernet and FDDI communications device with a unique hardware address from a pre-assigned block of addresses.
When you power up a node, the device controller’s physical address is initially set to the same value as its hardware address.
The node’s DECnet software resets the physical address to a new six-byte value based on the DECnet node address. This allows greater flexibility; the hardware address changes any time you install a new device controller while the DECnet node address remains the same. The physical address is used for service functions such as circuit loopback tests and configurator operations.
The physical address is also used during the remote boot process. When a node emits a Maintenance Operation Protocol (MOP) request program message, it includes the physical address, which the host node uses to identify the node when responding. Because DECnet has not yet started, the physical address value and hardware address value are identical at this point.
Network devices without assigned DECnet addresses retain the hardware address in the physical address field.
If an existing network is not divided into areas, the default area number for all nodes is 1. When you divide such a network into areas, you assign some nodes a new area number. Because the area number is part of the physical address constructed when DECnet starts, any node with a new area number must be restarted to construct the new physical address.
You can construct the physical address using the following process:
To obtain the decimal equivalent of the DECnet node address, convert the node address in the format area-number.node-number, using the following algorithm:
(area-number * 1024) + node-number
To form the two low order bytes of the physical address, convert the decimal node address to its hexadecimal equivalent and reverses the order of the bytes.
To form the full physical address, append the results of step 2 to the constant AA–00–04–00. This constant is reserved by VSI.
AA–00–04–00–hexnodeaddress
For example, to determine the physical address of a node whose node address is 63.171, calculate the following:
(63 * 1024) + 171 = 64683 decimal = FCAB hexadecimal
After reversing the order of the bytes and appending them to the constant, you have the following physical address:
AA-00-04-00-AB-FC
2.1.3. LAN Multicast Addresses
Ethernet or FDDI address types include the single-node physical address (as described in Section 2.1.2, ''Hardware Addresses and Physical Addresses'') and the multicast address which addresses one or more nodes on a given broadcast medium.
Physical and multicast addresses are distinguished by the least significant bit of the first byte.
| Physical Address | Multicast address | |
| Least significant bit | 0 | 1 |
| Sample address | AA–00–04–00–FC–00 | AB–22–22–22–22–22 |
| First byte in hexadecimal | AA | AB |
| First byte in binary | 1010 1010 | 1010 1011 |
| Low-order bit | 0 | 1 |
Multicast addresses include two subtypes:
Multicast group address. An address assigned to any number of nodes; you can use this address to send a message to all nodes in the group in a single transmission. The number of different groups that you can form equals the maximum number of multicast group addresses that you can assign.
Broadcast address. A single multicast address that you can use to transmit a message to all nodes on a given broadcast medium. (Use the broadcast address only for messages to be acted upon by all nodes on the Ethernet bus or FDDI ring, because all nodes must process them.)
Assigned multicast addresses include:
| Value | Meaning |
| FF–FF–FF–FF–FF–FF | Broadcast |
| CF–00–00–00–00–00 | Loopback assistance |
| AB–00–00–01–00–00 | Dump/load assistance |
| AB–00–00–02–00–00 | Remote console |
| AB–00–00–03–00–00 | All Phase IV routers |
| AB–00–00–04–00–00 | All Phase IV end nodes |
|
AB–00–00–05–00–00 through AB–00–03–FF–FF–FF | Reserved for future use |
|
AB–00–04–00–00–00 through AB–00–04–FF–FF–FF | For use by VSI customers for their own applications |
DECnet always sets up the controller at each node to receive messages sent to any address in the preceding list of VSI multicast addresses. For information about how to send messages to Ethernet multicast addresses, refer to the VSI OpenVMS I/O User's Reference Manual.
2.1.4. Node Characteristics
The configuration database for the local node must contain certain information about the local node and may contain node information for all nodes with which you want to communicate. For the local node, specify the node address, the node name and the buffer size (which determines the largest size message the node can forward). Indicate, or use the default value, for the highest address the local node will recognize.
The node type determines the routing capabilities of the local node. Some hardware platforms do not support routing type nodes; check the DECnet for OpenVMS Software Product Description for details. See Section 2.4.2.1, ''DECnet for OpenVMS Phase IV Nodes'' for more information about node types.
You can optionally specify data link routing capabilities of the local node. For remote nodes, specify node names and addresses. You can also specify default information to be used in performing downline load or upline dump operations involving remote nodes. For any or all nodes, you can specify access control information and node counter event logging information.
The data link control information you can specify for the local node controls certain characteristics of physical line operation, including the size and number of transmit and receive buffers and the number of circuits the local node can use. Set these values to levels that ensure reasonable system operation. Set the buffers for all nodes in the network to the same size. Otherwise, packets will be dropped when routed through nodes with smaller buffer sizes. A procedure for changing the size of buffers on all nodes in the network without bringing down the whole network is given in Section 3.3.4.1, ''Logical Link Control''.
You can control the operational state of the local node and thereby control its active participation in the network. This control is usually a function of whether inbound logical link connections can be established or maintained with the local node. You can use this control to restrict the operation of the node or to shut it down altogether.
2.1.4.1. Obtaining Remote Node Characteristics
To update your configuration database with current information about remote nodes in your network, you can copy the names and addresses of remote nodes from the database of another node to which you have access. Specify the node database (volatile or permanent) to be copied, and the local node database (volatile, permanent, or both) to which information is to be copied.
If you clear or purge your local node database before copying the remote node data, you can avoid possible conflicts between original and updated data. The executor node information is preserved during the clear or purge operation.
Copying a permanent node database permits you to keep your network information current even if you are part of a large network that changes frequently. Alternatively, if you configure your node without a permanent node database, you can obtain current information on other nodes in the network by copying it from another node (for example, from a node on your Ethernet that serves as a master by keeping its node database up to date).
2.1.5. Identifying a VMScluster as a Single Node
You can represent a whole VMScluster or some of the nodes in a cluster by a special identifier called the alias node identifier, which appears to other nodes in the network to identify an actual node. This mechanism allows users on DECnet nodes outside the cluster to access cluster resources without knowing what the cluster nodes are or which are active.
Any node in the cluster can elect to assume the alias node identifier while retaining its own unique node name and address. Use of the alias never precludes use of the individual node name and address. Thus, a remote node can address the cluster as a single node, and address any cluster member individually.
You can designate that your cluster node is assuming the alias node identifier by specifying in your configuration database either the alias node address or the alias node name (if you have previously associated that name with the alias address of the cluster).
2.1.5.1. Limiting the Use of an Alias
You can limit use of the alias for incoming and selected outgoing connections.
You then have the option of indicating whether you want to use the alias for incoming and selected outgoing connections.
You can indicate whether your node will accept incoming connection requests directed to the alias node address. By default, a node that assumes the alias is available to receive incoming connections addressed to the alias, but a small node that uses the alias for outgoing traffic may elect not to handle the extra incoming traffic. You can also select which DECnet for OpenVMS objects (software components that provide network services) are to use the alias by specifying in the object database that the alias address is to be used for outgoing connections originated by those objects. In addition, you can specify which objects will receive incoming connect requests directed to the alias node address.
MAIL is an example of a network object that can effectively treat the cluster as a single node. Ordinarily, replies to mail messages are directed to the node that originated the message; the reply is not delivered if that node is not available. If the node is in a cluster and uses the cluster alias, an outgoing mail message is identified by the alias node address rather than the individual address of the originating node. An incoming reply directed to the alias address is given to any active node in the cluster and is delivered to the originator's mail file.
Objects that involve multiple incoming links (such as PHONE) should not use the alias node address because each incoming link may be routed to a different node that uses the same alias. Also, objects whose resources are not accessible clusterwide should not be allowed to receive incoming connect requests directed to the alias node address. Section 2.6, ''Objects'' describes network objects and discusses the type of object for which the alias node identifier is suitable.
The alias node identifier permits you to set a proxy to a remote node for the whole cluster rather than for each node in the cluster. The clusterwide proxy can be useful if the alias node address is used for outgoing connections originated by the object FAL, which accesses the file system.
2.1.5.2. Managing the Alias Node Identifier
At least one of the VMScluster nodes that uses the alias node identifier must be a router. It can be a level 1 router, because all cluster nodes sharing the same alias node address must be in the same area.
The cluster router informs other nodes in the network of the existence of the alias node address. Other routers in the network perceive the cluster router as the shortest path to the cluster node address and send the router packets addressed to the cluster node address. If the cluster router receives a packet addressed to the alias node address, it forwards the packet to the appropriate cluster node. If the packet is for an existing logical link, the link identifier in the packet is sufficient to select the node. If the packet is initiating a new logical link, the router selects a participating node in circular fashion.
The network manager or cluster manager should select a suitable alias node name and address for the cluster nodes. You can specify either the alias node name or address as an executor parameter in your node database. If you specify the alias node name, you must first have associated the name with the agreed-upon alias node address. You can then assign the same parameters to this node as to other nodes, except that routing initialization passwords are not required. No point-to-point initialization can occur because a node cannot set up a circuit to an alias node address. The alias node address and name appear in the node databases of other nodes in the network.
You can optionally set a maximum value on the number of logical links that your node can initiate using the alias node identifier (see Section 2.5, ''Logical Links'').
2.2. Circuits
Circuits are high-level communications data paths between nodes; communication between nodes takes place over circuits. Circuits operate over physical lines, which are low-level communications paths (see Section 3.6, ''Line Commands'').
2.2.1. Classes of DECnet for OpenVMS Circuits
DECnet for OpenVMS employs four classes of circuit: DDCMP, CI, Ethernet, and FDDI.
DDCMP circuits provide the logical point-to-point or multipoint connection between two or more nodes. There are currently three types of DDCMP circuit:point-to-point, multipoint control, and multipoint tributary. A point-to-point circuit operates over a corresponding synchronous or asynchronous DDCMP point-to-point line. Asynchronous lines can be either static (permanent) or dynamic (switched).
Multipoint control circuits operate over synchronous DDCMP control lines. You can specify multiple circuits from the control (master) end of a control line, but each circuit must have a unique physical tributary address. On the tributary (slave) end, you can specify only one multipoint tributary circuit per line.
The setup of CI circuits is similar in many ways to the setup of DDCMP multipoint circuits. CI circuits, however, use their own protocol.
Ethernet and FDDI LAN circuits provide for multiaccess connection between a number of nodes on the same broadcast medium. LAN circuits differ from other DECnet circuits in that there is not a single node at the other end. A LAN circuit is a path to many nodes. Each node on a single LAN circuit is considered adjacent to every other node on the circuit and equally accessible. Every node must have a unique node identification within the node’s area: a physical address. (Node addressing is described in Section 2.1.2, ''Hardware Addresses and Physical Addresses''.) Ethernet circuits use the Ethernet protocol. FDDI circuits use the FDDI protocol.
Just as you specify the local node, you also specify parameters for all DECnet circuits connected to the local node.
Identify each circuit by name and specify information that directly affects the circuit’s operation. You can also specify the operational state of circuits connected to your local node. Thus you can control circuit traffic and perform service functions. The state of a circuit may ultimately affect the system’s ability to reach an adjacent node. The circuit state can have a similar effect on routing.
The following sections describe the circuit component. For a discussion of using NCP commands to specify circuits, see Chapter 3, "Managing and Monitoring the Network".
2.2.2. DDCMP Circuit Devices
| Mnemonic | Driver | Description |
|---|---|---|
|
DIV |
SD |
DIV32 ISDN controller |
|
DMB |
SI |
DMB32 synchronous line unit |
|
DMC |
XM |
DMC11, DMR11 synchronous links |
|
DMF |
XG |
DMF32 synchronous line unit |
|
DMP |
XD |
DMP11, DMV11 synchronous point-to-point multipoint line device |
|
DSB |
SL |
DSB32 synchronous line unit |
|
DSF |
SF |
VAXft 3000 synchronous communications controller |
|
DST |
ZS |
DST32, DSH32 synchronous circuit device |
|
DSV |
SJ |
DSV11 synchronous line interface |
|
DSW |
ZT |
DSW-21, DSW-41, DSW-42 synchronous communication device |
|
TT |
NO |
DZ11, DZ32, DZQ11, DZV11 asynchronous circuit device |
|
TX |
NO |
DMB32, DHB32, DHU11, DHV11, DHT32, DMF32 or DMZ32, DHQ11, DSH32,CXY08 asynchronous device |
The asynchronous circuit devices are point-to-point circuit devices used for static or dynamic asynchronous connections.
Asynchronous DDCMP circuits need not be predefined for dynamic connections. They are established automatically during dynamic switching of terminal lines (see Section 2.3.2.3, ''Dynamic Asynchronous Lines'').
Other DECnet implementations may support other DDCMP circuit devices. If a node in your network uses a circuit device other than one of these, refer to the appropriate DECnet documentation for that system. This section provides a general discussion of point-to-point and multipoint circuits.
Every DDCMP circuit provides a logical point-to-point connection between two nodes. The circuit operates over the corresponding DDCMP line (for example, the DMC11 circuit operates over the DMC11 line). The DMP11, operating as a multipoint control circuit, also provides a logical, multipoint connection (over one physical line) between a control station and several tributaries (as illustrated in Figure 2.1, ''Multipoint Circuits and Associated Lines''). The DMP11 and DMV11 can also operate as multipoint tributary circuit devices that provide a logical connection between a tributary and a control station.
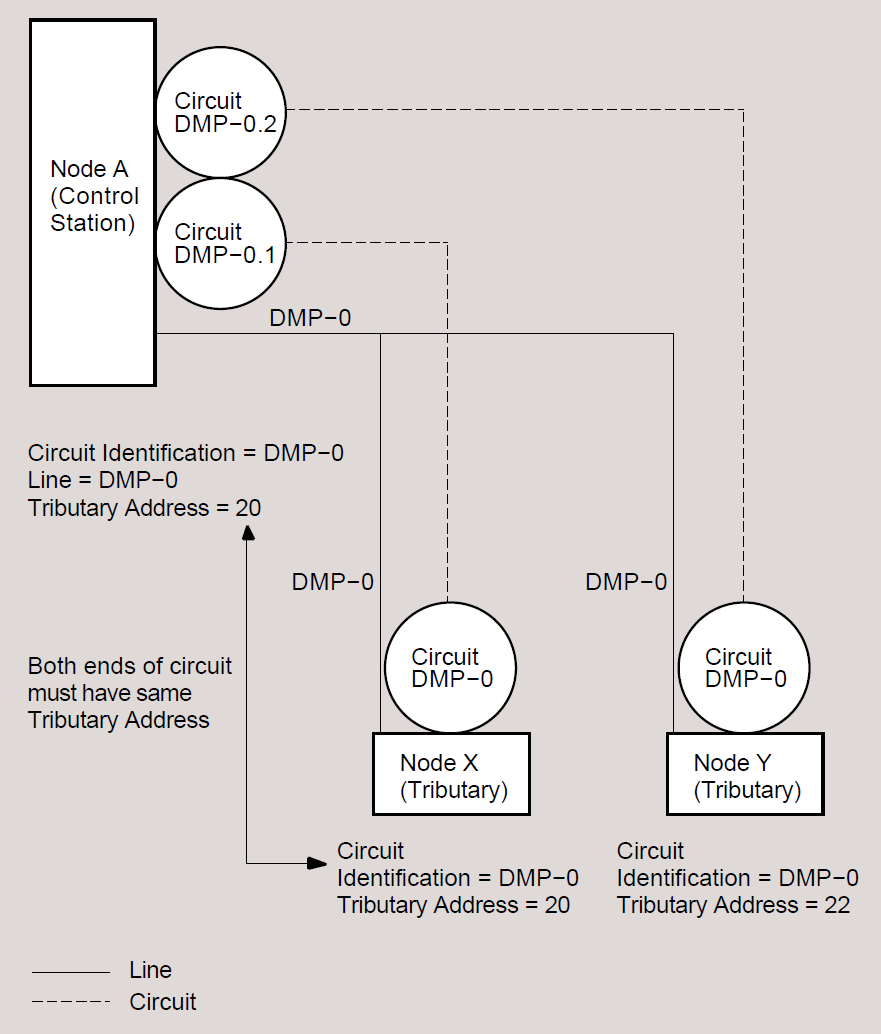
Control Station – the node at the controlling end of a multipoint circuit. It controls the tributaries for that circuit.
Polling – the activity that the control station performs on tributaries of a multipoint circuit. The control station regularly sends request messages to (that is, polls) each eligible tributary in the polling list. The request message asks the tributary if it has anything to send (essentially giving it permission to use the bus).
Tributary – a physical termination point on a multipoint circuit that is not a control station.
Tributary Address – a numeric address that identifies a tributary node on a multipoint circuit.
You can connect both a multipoint control circuit and a multipoint tributary circuit to the same node. The node could then serve as the control station for one multipoint circuit and as a tributary for another multipoint circuit.
The system manager must supply tributary addresses for a control station to use when polling each tributary in a polling list.
2.2.3. CI Circuit Devices
Each station on the CI can talk directly to every other station. These stations are called tributaries and all stations are alike. There are no "control" and "tributary" stations as with DDCMP multipoint circuits. Only the setup of CI circuits is similar to multipoint circuits.
There are no polling parameters on the CI.
CI circuits use their own communication protocol.
$ RUN SYS$SYSTEM:SYSGEN CONNECT CNA0/NOADAPTERThese command lines connect the CNA0 to the CNDRIVER and load the CNDRIVER.
2.2.4. Ethernet Circuit Device
| Mnemonic | Driver | Description |
|---|---|---|
| BNA | ET | DEBNA, DEBNI communications link |
| ISA | EZ | SGEC communications link |
| KFE | EF | VAXft 3000 communications link |
| MNA | EX | DEMNA communications link |
| MXE | EC | PMAD communications link |
| QNA | XQ | DEQNA, DELQA, DESQA, DEQTA communications link |
| SVA | ES | DESVA communications link |
| UNA | XE | DEUNA, DELUA communications link |
Ethernet messages are sent over the Ethernet as datagrams, which means that messages can be lost because of transmission errors. DECnet provides for automatic retransmission of lost messages. The Ethernet controller and device driver can handle multiple protocol types simultaneously. Therefore, while DECnet is running, other applications can use another protocol type on the Ethernet device.
2.2.5. Ethernet Configurator Module
All nodes on an Ethernet circuit are logically adjacent. To obtain a list of all systems on an Ethernet circuit, you can use the Ethernet configurator module. The configurator module listens to system identification messages transmitted periodically by every VSI-supported node on the Ethernet circuit, and builds the configuration list from the received messages.
Approximately once every 10 minutes, each node on an Ethernet circuit that conforms to the DNA specifications transmits a system identification message (a hello message) to a multicast address that the configurator monitors. For a random distribution of nodes with possible loss of system identification datagrams, the configurator would require 40 minutes to collect all node addresses. In practice, the configurator normally requires about 12 minutes to complete a list.
The Ethernet configurator module requires a default nonprivileged DECnet account or an account associated with the $NICONFIG object. You use NCP commands to access and control the configurator module. The configurator runs as a separate process and, once it is started, becomes available to all users on the system. The configurator module continues to execute and maintains and updates its database of information on active nodes.
When you request information about the current configuration of nodes on Ethernet circuits, the following is displayed for each system: its Ethernet physical and hardware addresses, the device connecting it to the circuit, maintenance functions it can perform, and the time of the last system identification message from the system.
2.2.6. FDDI Circuit Devices
Table 2.3, ''FDDI Circuit and Line Devices'' shows the devices for FDDI circuits. Devices on this table conform to the FDDI protocol.
| Mnemonic | Driver | Description |
|---|---|---|
| FZA | FC | DEFZA FDDI communications link |
| MFA | FX | DEMFA FDDI communications link |
2.3. Lines
Lines provide physical communications and are the lowest level communications path. Circuits are high-level communications paths that operate over lines.
2.3.1. Classes of DECnet for OpenVMS Lines
DECnet for OpenVMS supports four classes of line: DDCMP, CI, Ethernet, and FDDI. Some hardware platforms do not support all four classes; refer to the DECnet for OpenVMS Software Product Description (SPD) for the latest configuration-support information.
Each class of line provides a specific kind of connection. An Ethernet or FDDI line is a multiaccess connection between two or more nodes.
A DDCMP line provides the physical point-to-point or multipoint connection between two or more nodes. A CI line provides a high-speed connection between two or more nodes.
For DDCMP, CI, Ethernet, and FDDI configurations, each circuit is directly related to a corresponding line.
Just as you establish node and circuit parameters, you also establish parameters for all physical lines connected to the local node. Identify each line by name and specify information that directly affects the line’s operation. You can control the operational state of the line, and thus control line traffic and perform service functions. The state of a line may ultimately affect the reachability of an adjacent node.
The following sections describe the line component. For a discussion of using NCP commands to specify line parameters, see Chapter 3, "Managing and Monitoring the Network".
2.3.2. DDCMP Lines
On systems that support them, DDCMP lines can be synchronous point-to-point or multipoint lines or asynchronous point-to-point lines. Asynchronous lines can be static (permanent) or dynamic (temporarily switched). (For a complete table of DDCMP devices and their corresponding mnemonic names, refer to Section 2.2.2.)
2.3.2.1. DDCMP Line Devices
The DMC11 and the DMR11 are point-to-point line devices and are considered identical. The DMP11 can be either a point-to-point, multipoint control, or multipoint tributary line device. The DMV11 is similar to the DMP11; DECnet refers to either device as the DMP11. The DMB32 and DSB32 synchronous line units are point-to-point devices.
The asynchronous line devices are point-to-point line devices used for static or dynamic asynchronous connections.
Asynchronous DDCMP lines need not be predefined for dynamic connections. They are established automatically when a dynamic asynchronous DDCMP connection is made (see Section 2.3.2.3, ''Dynamic Asynchronous Lines'').
Every DDCMP line provides a point-to-point connection between two nodes. Circuits, the actual communications path, operate over the line. The DMP11 and DMV11 also provide a multipoint connection between two or more nodes. In Figure 2.2, ''Multipoint Lines'' a multipoint line controlled by the DMP11 provides the physical connection between a control node and several tributary nodes.
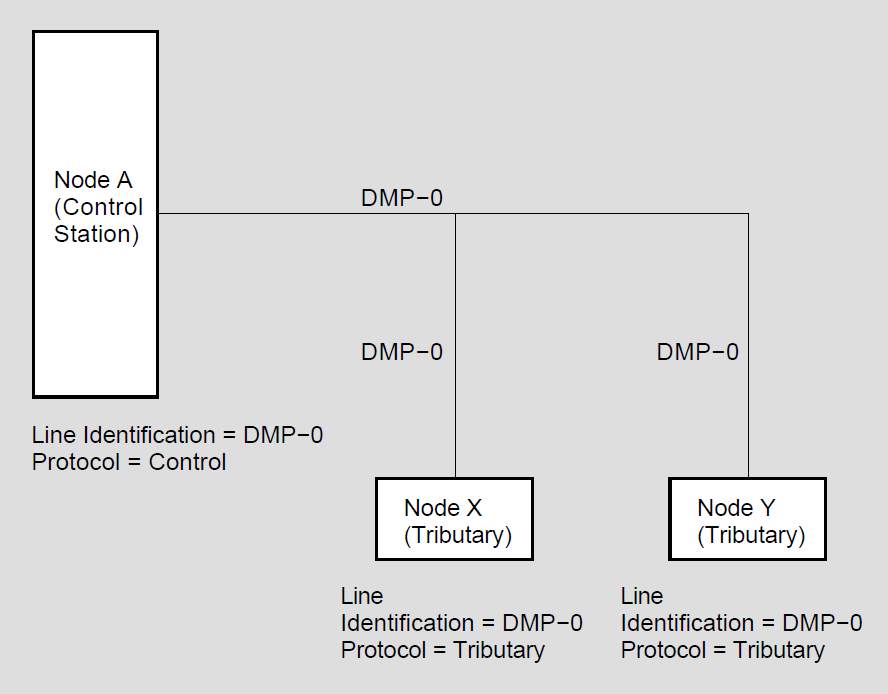
You can connect two multipoint lines to the same node. The node could then serve as the control station for one multipoint line and as a tributary for another multipoint line.
Because a heterogeneous network may have DDCMP line devices other than one of the preceding, become familiar with the entire range of devices and their impact on network management. If a node in your network uses a line device other than these, refer to the appropriate DECnet documentation.
2.3.2.2. Static Asynchronous Lines
A static asynchronous DDCMP connection is a permanent connection established between two nodes (such as a router node and an end node). The two nodes are connected by either a modem or by a physical line attached to a terminal port at each end (for example, port TTA0 on the end node and port TXB7 on the router).
A static asynchronous connection can also be made over a dialup line.
Before the DECnet connection is made, the terminal lines must be converted to static asynchronous DDCMP lines. Each terminal port must have an asynchronous DDCMP line device installed, and the system manager at each node must load the asynchronous DDCMP driver, NODRIVER.
The commands required to install static asynchronous lines and the NCP commands to configure a network using static asynchronous lines are given in Section 5.2.3.3, ''Installing Static Asynchronous Lines''.
2.3.2.3. Dynamic Asynchronous Lines
A dynamic asynchronous line differs from a static asynchronous line or other DECnet for OpenVMS line in that it is normally switched on for network use only for the duration of a dialup connection between two nodes. When the telephone is hung up, the line reverts to being a terminal line.
Dynamic switching of terminal lines to asynchronous DDCMP lines can occur provided both nodes have DECnet installed. Assuming that both the remote node and the local node are VMS operating systems, the system manager at each node must have loaded the asynchronous driver NODRIVER and installed the privileged shareable image DYNSWITCH. (If the local node is a personal computer, there is no need to load NODRIVER and install DYNSWITCH.)
The commands required to install static asynchronous lines and the NCP commands to configure a network using static asynchronous lines are given in Section 5.2.3.4, ''Installing Dynamic Asynchronous Lines''.
2.3.3. CI Line Device
$ RUN SYS$SYSTEM:SYSGEN CONNECT CNA0/NOADAPTER
This procedure connects CNAO to CNDRIVER and loads the CNDRIVER.
2.3.4. Ethernet and FDDI Line Devices
You connect a node to the local area network by an Ethernet or FDDI communications controller. The circuit operates over the line.
A particular LAN node is identified by the hardware address of its line device; this hardware address is stored in read-only memory in the controller. When DECnet starts an Ethernet or FDDI line, it constructs a physical address for the node (see Section 2.1.2, ''Hardware Addresses and Physical Addresses''). Shutting off machine power causes the controller to reset the physical address to the original hardware address.
Note
If more than one application will use a particular Ethernet or FDDI line (for example, DECnet and LAT), DECnet must be brought up first because it resets the physical address.
(For a complete table of Ethernet devices and their corresponding mnemonic names, refer to Section 2.2.4, ''Ethernet Circuit Device''. For a complete table of FDDI devices and their corresponding mnemonic names, refer to Section 2.2.6, ''FDDI Circuit Devices''.)
2.4. Routing
DECnet for OpenVMS supports both routing and non-routing (end) nodes.
Routing is the network function that determines the paths or routes along which packets (data) travel to reach their destinations. The Routing layer of DECnet handles routing functions. Because the need for routing pervades network operation, as much as possible is done in software to relieve you from worrying about the configuration of the network.
As system manager, however, you need to be concerned with the configuration of the network in terms of routing. You must configure each network node as either a routing or a non routing node, and you have the option of dividing the whole network into different areas. In addition, certain parameters in the configuration database permit a degree of indirect control over network routing, but, for most networks, the default values of these parameters are reasonable.
For very large networks, it may be helpful to have a network manager oversee the operation of the network as a whole. The network manager could ensure that all node addresses are unique and that routing control parameters provide for efficient data flow through the network.
The following sections explain the different types of routing and nonrouting nodes and configurations, describe the levels of routing, and summarize special routing techniques used with Ethernet. They also introduce basic terms and concepts involved in routing control. Chapter 3, "Managing and Monitoring the Network" discusses the NCP command parameters that affect routing.
2.4.1. Routing and Nonrouting Nodes
Routing nodes (routers) are nodes that can send, receive, and route packets from one node to another. Routers have one or more active circuits. Routers regularly receive and maintain information about other nodes. They perform the routing operation by associating a circuit with the destination node for the packet and transmitting that packet over that circuit.
In a multiple-area network, all routers in a particular area can route packets within the area; some of these routers can also route packets to and from other areas. The two kinds of routers used in area routing configurations are level 1 routers and level 2 routers.
Note
On AXP systems, VSI supports level 1 routing only for nodes acting as routers for a cluster alias. VSI does not support level 2 routing or routing between multiple circuits.
The level 1 router performs intra-area routing within a single area of the network. If all nodes are configured in the same area, the whole network is considered a single area (area 1), and all routers are level 1 routers. The level 2 router performs intra-area routing within its own area and interarea routing between its area and one or more other areas of the network.
On an Ethernet or FDDI LAN, if there are two or more routers, one router is elected the designated router to provide message routing services for end nodes on the LAN. If no routers are available, LAN end nodes can communicate with each other directly by sending a packet out over the LAN and then waiting until the timeout for a reply. However, routers are the only LAN nodes that can route messages to network nodes not on the LAN.
Nonrouting nodes (end nodes) contain a subset of network software that permits them to send packets or receive packets addressed to them, but not to route packets to other nodes. End nodes have a single active circuit connecting them to the rest of the network. They do not send or receive information about the network topology. If two end nodes are connected by a nonbroadcast circuit, these nodes constitute the entire network.
2.4.2. Types of DECnet Nodes
Phase II—Phase II
Phase II—Phase III
Phase III—Phase III
Phase III—Phase IV
Phase IV—Phase IV
Phase IV—DECnet/OSI
DECnet/OSI—DECnet/OSI
Phase II nodes can communicate with each other as long as there is a physical data link between them. They support only point-to-point connections. There is no Phase II support for Ethernet.
Phase III DECnet introduced adaptive routing, which allows a reasonably large number of nodes to communicate conveniently. There is no Phase III support for Ethernet or FDDI.
Phase IV DECnet permits the configuration of very large networks and expands the types of data links available for use. Phase IV supports area routing, which allows configuration of a network of up to 63 areas, each containing up to 1023 nodes.
A Phase III node should not be included in a path between Phase IV nodes.
A Phase III node in a Phase IV multiple-area network should not be linked with nodes outside its own area.
Routing initialization passwords (described in Section 2.8.1, ''Routing Initialization Passwords'') are required when a Phase III node is initialized in a Phase IV network.
When DECnet/OSI nodes communicate with Phase IV nodes, they use Phase IV transport and routing protocols.
2.4.2.1. DECnet for OpenVMS Phase IV Nodes
- Phase IV routers. These nodes deliver packets to and receive packets from other nodes, and route packets from other source nodes through to other destination nodes.
The level 1 router, which performs routing within a single area. The node type is ROUTING IV.
The level 2 router, which performs routing within its own area and to and from other areas. The node type is AREA.
Note
On AXP systems, VSI supports level 1 routing only for nodes acting as routers for a cluster alias. VSI does not support level 2 routing or routing between multiple circuits.
Phase IV nonrouting nodes (end nodes). These nodes deliver packets to other nodes and receive packets from other nodes, but do not route packets. The node type is NONROUTING IV.
Phase III routers. These nodes deliver packets to and receive packets from other nodes, and route packets from other source nodes through to other destination nodes whose addresses are less than 256. They use DDCMP, X.25, and CI circuits, but do not support Ethernet or FDDI circuits.
Phase III nonrouting nodes (end nodes). These nodes send packets to other nodes and receive packets from other nodes, but do not route packets. These nodes cannot support Ethernet or FDDI.
Phase II nodes. These nodes can send packets to adjacent Phase III routers or to other adjacent Phase II nodes. However, Phase II nodes can send packets only in point-to-point configurations. In addition, a Phase III node cannot communicate with a Phase II node through another Phase III node.
DECnet/OSI nodes.
2.4.3. Routing Features of DECnet for OpenVMS License Options
Full function
End node
The full-function license permits the use of both routing and end node capabilities. The end node license permits a node to be used only as an end node. An upgrade from end node to full function capabilities is available, providing the software for your hardware platform includes routing capabilities.
Both licenses permit the use of any kind of data link. Section 6.1, ''Installing a DECnet for OpenVMS Key'' describes how the DECnet for OpenVMS license is enabled to turn on the appropriate capability.
Less use of the central processor is required for routing.
Data link efficiency is increased: there is no routing overhead and no route-through traffic occurs over the circuit.
The user on an end node cannot directly see the status of other nodes in the network, because end nodes rely on routing nodes to maintain that information. However, an end node can communicate with other nodes in the network, including nodes outside its own area.
Only one circuit is allowed to be active at any time. Packets are not routed between circuits on an end node. You can configure backup circuits for automatic failover should the primary circuit fail. The backup circuits are not used when the primary circuit is functioning. Set the backup circuit to have a lower cost than the primary circuit.
2.4.4. Area Routing
Phase IV DECnet permits implementation of very large networks through the use of area routing techniques, while still supporting configuration of smaller networks that are not divided into areas. The network manager has the option of partitioning a large network into areas. Each area is a group of nodes. Nodes are grouped together in areas for hierarchical routing purposes. Hierarchical routing involves the addition of a second level of routing to the network. Routing within an area is referred to as level 1 routing; routing between areas is called level 2 routing.
Permits configuration of very large networks of more than 1023 nodes.
Requires less routing traffic, restricting routing overhead between areas to the level 2 routers. Level 1 routers exchange routing information only about nodes in their own area.
Allows different organizations to manage their nodes separately within a large network.
Makes the merging of existing networks easier.
When a level 1 router receives a packet destined for a node in another area, it uses level 1 routing to send the packet to the nearest node within its own area that can perform level 2 routing. That router forwards the packet by level 2 routing to a level 2 router in the destination area, which in turn sends the packet by level 1 routing to the destination node in its area.
If two or more level 2 routers exist in the same area, each level 1 router in that area sends packets destined for other areas to the nearest level 2 router, regardless of which level 2 router is closest to the destination area. The level 1 router has no access to level 2 routing information.
Each area in the network is assigned an area number. Every node in the area is uniquely identified by the addition of its area number as a prefix (followed by a period) to its node number. For example, node 15 in area 7 is addressed as node 7.15. The node number must be unique within the area, but may be used again within another area. Thus, node identification within an area is independent of node identification within other areas.
Phase IV DECnet permits configuration of a maximum of 63 areas (areas 1 through 63), each containing up to 1023 nodes. A Phase IV node address is a 16-bit number: the most significant six bits define the area number, and the least significant 10 bits specify the node number within the area. You can convert the Phase IV node address to its decimal equivalent for use in commands, such as COPY and MAIL, that do not recognize the area prefix (the conversion procedure is given in Section 3.7.2, ''Specifying the Area Number in a Node Address''). You can convert to its hexadecimal equivalent for use in determining the physical address of the node (the conversion procedure is given in Section 2.1.2, ''Hardware Addresses and Physical Addresses'').
You assign the node address to your own node when you configure it. If you do not specify the area number when addressing a remote node, that node is assumed to be in the same area as your local node.
In a network not divided into multiple areas, each router performs level 1 routing throughout the network.
The characteristics of level 1 and level 2 routing nodes are described in the following section.
2.4.4.1. Level 1 and Level 2 Routers
An area can contain many level 1 routers and end nodes, and must contain at least one level 2 router to provide the connection to other areas. A level 1 router acts as a standard routing node. It keeps information on the state of nodes within its own area. Level 1 routing nodes and end nodes obtain access to nodes in other areas through a level 2 router residing in their own area.
Level 2 routers connect areas.
Level 2 routers also act as level 1 routers within their own area.
A level 2 router serves as a level 1 router when it is not physically connected to another level 2 router.
All level 2 routers must be connected in such a way that they create a network of their own.
Level 2 routers exchange level 2 routing messages among themselves.
In any given area, there can be more than one level 2 router.
Each level 2 router indicates it is the nearest level 2 router to each level 1 node in its own area, but each level 1 node decides what its level 2 router is on the basis of cost.
2.4.5. Ethernet Routers and End Nodes
Two special concepts are involved in routing over an Ethernet or FDDI LAN circuit: the designated router and end node caching.
2.4.5.1. Ethernet Designated Routers
If there are two or more routers on the same LAN, one of them is elected as the designated router. By convention, the router with the highest numerical priority (the router priority parameter is set as a CIRCUIT characteristic in its database) is elected router for the circuit. In case of a tie, the node with the highest address is elected as the designated router. The function of the designated router is to route messages over the Ethernet on behalf of end nodes. A designated router is elected even if there are no end nodes currently on the Ethernet.
End nodes can also exchange messages directly without using a router. Routers are needed, however, when messages are to be routed to nodes off the LAN.
End nodes are informed of the identity of the designated router on that LAN. End nodes transmit multicast hello messages, so that routers know of their presence on the LAN. End nodes keep no information about the network configuration, except that they are permitted to keep a cache of nodes within their area that they may address directly on the LAN, rather than going through a router (see Section 2.4.5.2, ''Ethernet or FDDI End Node Caching''). Thus, an end node may send a packet directly to another Ethernet end node, if the address has been cached, or it may send a packet to the designated router for forwarding.
End nodes can exist on a LAN without a router. When an end node on the LAN wants to communicate with another end node, and notes that no designated router exists, it always sends the packet directly to the addressed node using the LAN address derived from the DECnet address. If the addressed node is active, the sender receives a reply; if the addressed node is not available, a timeout occurs.
2.4.5.2. Ethernet or FDDI End Node Caching
End nodes normally send packets by means of a router. To minimize the space and time overhead involved in the routing function on Ethernet or FDDI LAN circuits, a caching mechanism is available that takes advantage of the fact that nodes on a LAN are logically one hop away from each other (one hop is the distance between two adjacent nodes).
An end node maintains a cache of limited size of the addresses of the target nodes with which it has had contact. When a designated router is present and an end node is ready to send a packet to a specific target node for the first time, the end node sends the packet to the designated router, which in turn forwards the packet to the target node. When there is no designated router on the circuit, the end node sends the packet directly, because it expects that the other node is there.
By means of the acknowledgment messages it receives, the end node builds its cache of addresses of specific nodes. If a response is received from the target node, the end node examines the received packet for the existence of specific bits (the bits are checked even if the first packet went to the designated router).
If the intra-LAN bit is set, which indicates that the target node is on the same LAN as the end node, then the next packet can be sent directly, rather than by means of the designated router. If the received packet has the intra-LAN bit clear (which indicates that the target node is not on the same LAN as the end node, but is reachable through a routing node that is on the LAN), then the next packet can be sent from the end node to the target node via a routing node, rather than by means of the designated router.
In summary, the end node uses the acknowledgment messages it receives to build a cache of addresses of target nodes that either are on the same LAN or can be reached through a node on the LAN. This mechanism is called reverse path caching.
2.4.5.3. Area Routing on an Ethernet Bus or FDDI Ring
All nodes on an Ethernet bus or FDDI ring need not be in the same area; you can configure more than one area on a single LAN. The areas on the same LAN are logically separate from each other.
When you configure two level 1 routing nodes on a LAN in different areas, the nodes do not communicate directly with each other. Each level 1 router communicates with a level 2 router in its own area, which sends the message to a level 2 router in the other area. The level 2 router that receives the message then transmits it to the second level 1 router.
2.4.6. Routers and End Nodes on CI Data Links
On VAX, you can configure nodes using a CI data link in a VAXcluster as routers or as end nodes.
2.4.6.1. CI End Nodes
You can configure a two-node VAXcluster that uses a CI data link using end nodes only, but at least one router is required if additional nodes are configured in the cluster. The CI protocol does not include the multiaccess capabilities of the Ethernet or FDDI protocols.
2.4.6.2. CI Routers
One or more CI routers are necessary if a VAXcluster consists of three or more nodes. CI circuit devices are treated as though they were multipoint devices (like the DMP device) rather than as multiaccess devices such as the Ethernet or FDDI circuit device. Although only one router is required in a cluster of more than two nodes, having more routers in the cluster environment increases the overall availability of the network within the cluster.
If the cluster configuration includes end nodes as well as routers, a backup, higher-cost circuit could be provided for each end node. This backup circuit could take over if the primary circuit connecting the end node to its router fails (see Section 3.7.6, ''CI End Node Circuit Failover'').
End nodes communicating through a router send all data through that router even though they are connected to the same CI. You achieve the best performance and availability by defining all cluster nodes as routers if the CI is used as the data link.
2.4.7. Routing Concepts and Terms
This section briefly explains routing concepts and defines those routing parameters that provide some control over network routing. Chapter 3, "Managing and Monitoring the Network" describes how to use NCP commands to set these routing parameters.
Hop. The logical distance between two nodes is measured in hops. The distance between two adjacent nodes is one hop.
Path. A path is the route a packet takes from source to destination.
Path length. The path length is the number of hops along a path between two nodes; it is the number of circuits a packet must travel across to reach its destination. The path length never exceeds a maximum number of hops, a value that the system manager sets relative to the size and configuration of each network. For an area network, the network manager should determine the maximum number of hops permitted within an area and between areas.
Cost. The cost is an integer value assigned to a circuit between two adjacent nodes. It is usually proportioned to transmission delay. Each circuit has a separate cost. In terms of the routing algorithm, packets are routed on paths with the least cost. Nodes on either end of a circuit can assign different costs to the same circuit.
Path cost. The path cost is the sum of the circuit costs along a path between two nodes. The path cost never exceeds a maximum cost value the network manager specifies for the network. For an area network, the network manager sets the maximum cost for a path within an area, and for a path between areas.
Reachable node. A reachable node is a destination node to which the Routing layer on the local node has a usable path; that is, the path does not exceed the values for maximum cost or hops between nodes specified in the executor database. For an area network, a reachable area is one to which the path does not exceed the values for maximum cost or hops between areas set in the executor database.
Maximum visits. The maximum number of nodes through which a packet can be routed before arriving at the destination node is referred to as the maximum number of visits the packet can make. If a packet exceeds the maximum number of visits, the packet is dropped.
When configuring a network, the network manager establishes the routing parameters for circuit cost control and route-through control. These parameters allow you to control the path that data is likely to take when being transmitted through the network, and also to minimize congestion at particular nodes in the network. For most networks, the default values for these parameters are reasonable.
The network manager must assign a circuit cost to every circuit that connects the local node with adjacent remote nodes. These costs serve as values that DECnet software uses to determine the path over which data is transmitted. When the node is up and running, you can dynamically change the cost of a circuit to a higher or lower value. Altering circuit costs can change packet routing paths and thereby affect the use and availability of network circuits and resources.
Along with defining circuit costs, you should also consider the path lengths and total path cost for routing packets over the network. For routing purposes, DECnet software identifies the least costly path to each destination in the network. As network manager, you are responsible for defining both the maximum cost of all circuits and the maximum hops that a packet can take when routed to the destination node. If you are configuring an area network, you should define the maximum cost and hops for a path between nodes within your own area, and the maximum cost and hops for a path between level 2 routers in the whole network.
If multiple paths to a destination node have the same path cost, the Routing layer software, by default, splits packet loads for routing on several paths, rather than on only one. This method of equal cost path splitting improves network throughput. You can define the maximum number of equal cost paths to be used for routing when a packet load is to be split.
Because equal cost path splitting implies that data packets are sent to the destination node over different paths, the packets may be received out of order by the destination node. The Network Services Protocol (NSP) maintains a cache of out-of-order packets so that they can be reassembled in order. This mechanism is called out-of-order packet caching. When packet loads are split and routed to a node that does not support out-of-order packet caching, the destination node is unable to reassemble any packets received out of order. Any packets received out of order by a node that does not support out-of-order packet caching need to be retransmitted. This need for retransmission hinders network performance. You can compensate for a node that does not support out-of-order packet caching by setting the appropriate value for the executor parameter PATH SPLIT POLICY for that node.
The Routing layer in each node of the network uses congestion-control algorithms to maintain an efficient level of routing throughput. In addition, as network manager, you can maintain indirect control over routing throughput by defining the maximum visits a packet can make before being received by the destination node. Packets that exceed this limit are discarded. This control prevents packets from looping endlessly through the network.
2.4.8. Routing Messages
Adjacent routing nodes exchange routing update messages. A routing update message is a packet that contains information about the cost and hops for each node in the network. In an area network, a level 1 router sends routing update messages about all nodes within its own area to adjacent routers in the area. Level 2 routers send routing update messages containing cost and hop information about all areas to adjacent level 2 routers in the network.
Whenever this routing information changes (for instance, when a circuit goes down), new routing messages are sent automatically. For example, if someone were to change the state of a circuit, rendering a remote node unreachable, this change would be reflected automatically in the routing update messages exchanged by the routing nodes.
2.4.8.1. Segmented Routing Messages
The number of nodes that Phase IV DECnet can support in a single-area network was increased to a maximum of 1023 from the limit of 256 for Phase III DECnet. This increase was due to changes in the routing update messages. In Phase III, a legal network was restricted in size to the number of nodes for which cost and hop information could be fit into a single routing update message. Furthermore, Phase III routers had to send complete updates containing information about all nodes, whether or not their reachability had changed. Phase IV allows segmented routing messages to be sent, that is, messages that contain only the information that has been changed. Phase IV also permits routing updates to be sent in multiple messages. Therefore, the size of the routing messages and the number of buffers required to receive them are reduced.
2.4.8.2. Timing of Routing Message Transmissions
The network manager can set a timer for transmission of routing messages, controlling the intervals at which nonconfiguration change routing updates are transmitted. The routing timer controls the frequency of transmission of these messages on non-LAN circuits. The broadcast routing timer controls their frequency for Ethernet or FDDI broadcast circuits. Expiration of the broadcast routing timer causes the local node to send a multicast routing configuration message to all routers on the LAN.
2.5. Logical Links
DECnet uses a mechanism called a logical link to allow communication between processes running on either the same node or on separate nodes in the network. A logical link carries a stream (consisting of regular data and interrupt data) of full-duplex traffic between two user-level processes. Each logical link is a temporary data path that exists until one of the two processes terminates the connection.
Define the maximum number of logical links that can be active at the local node. If your node can also use an alias node address (which is common to some or all nodes in a VMScluster), you can specify the maximum number of logical links that can use the alias for incoming and outgoing connections. Note that the upper limit on the number of logical links that your node can originate using the individual node address is reduced if your node also uses an alias.
Specify the number of packets that can be transmitted on a logical link before an acknowledgment is received (the pipeline quota).
Selectively disconnect active links on the local node while the network is running and verify that the links have been disconnected, by displaying information about the status of the links.
The incoming timer, which protects the local node against the overhead caused by a local process that does not respond to an inbound connection request within a specified interval
The outgoing timer, which protects the local node against the overhead caused by a connection request to a remote node that does not complete within a specified interval
The inactivity timer, which protects the user against a link that may be permanently unusable, by setting the frequency with which DECnet tests an inactive link
Normally use default values for the parameters that regulate the frequency of NSP message retransmission at the local node, unless you need to change the operating characteristics of a particular logical link. The retransmit time is affected by the estimated delay in round-trip transmission between the local node and the node with which it is communicating. You use the delay weight and delay factor parameters to calculate new values for this estimated delay. The retransmit factor parameter governs the number of times NSP tries to retransmit on a logical link.
2.6. Objects
Objects provide known general-purpose network services. An object is identified by object type, which is a discrete numeric identifier for either a user task or a DECnet program such as the Network Management Listener (NML) or the File Access Listener (FAL). The DECnet network software uses object type numbers to enable logical link communication using NSP. The system manager is responsible for supplying information for those objects, both user-defined and network objects, that can be used over the network.
2.6.1. DECnet for OpenVMS Objects
When setting up the network, supply information for two general kinds of DECnet objects:
Objects with a 0 object type. These objects (also known as named objects) are usually user-defined images for special-purpose applications. See Section 3.9.1.4, ''DECnet for OpenVMS Command Procedure Identification'' for more information.
Nonzero objects. Nonzero objects (also known as numbered objects) serve two purposes, as known objects that provide specific network services such as FAL (used for file access) or NML (used for network management), and as user-supplied known services for user-defined tasks. The object number serves as a standard addressing mechanism across a heterogeneous network.
The VSI-supplied objects described in the following list are defined automatically by NETACP at network startup. The NETCONFIG.COM procedure, described in Section 5.2.2, ''Using NETCONFIG.COM'', gives users a variety of access control options for these objects.
DECnet Test Receiver (DTR)—DTR is a DECnet test program used with the DECnet Test Sender (DTS) to test logical links.
Event logger (EVL)—EVL logs occurrences of significant events (locally or remotely) for a given network component.
Host loader (HLD)—HLD provides downline task-loading support for RSX–11S tasks.
File access listener (FAL)—FAL provides authorized access to the file system of a DECnet node on behalf of processes executing on any node in the network. FAL communicates with the initiating node by means of the data access protocol (DAP).
MAIL—MAIL provides personal mail service.
Loopback mirror (MIRROR)—MIRROR is used for loopback testing, including those run during the DECnet phase of the User Environment Test Package (UETP).
Network management listener (NML)—NML that provides remote management of the local system, such as gathering and reporting information about network status, and modification of node and line parameters.
PHONE—PHONE allows you to communicate with other users on your system or with any other DECnet for OpenVMS system connected to your system.
Virtual Performance Monitor (VPM) Server—VPM is used to run VMScluster monitoring features of the Monitor Utility (MONITOR).
For every object that can be started by an inbound connection request, supply a command procedure, unless either of the following conditions exist:
The object is one of the following VSI-supplied command procedures: FAL, HLD, NML, EVL, DTR, MAIL, PHONE, MIRROR.
The object is defined as an image, through specification of objectname.EXE as the object file name.
Chapter 3, "Managing and Monitoring the Network" provides rules for establishing and identifying command files for objects.
You can also specify privileges a user must have in order to connect to the object, and provide default access control information to be used for inbound connections to the object when no access control is specified by the remote node. Additionally, you can assign default proxy login access controls for the object. Refer to Section 2.8, ''Network Access Control'' for a discussion of access control information used for logical link connections and a description of proxy login access control.
2.6.2. Objects Using the Cluster Alias Node Identifier
If your node is in a VMScluster that is using an alias node identifier, you have the option of specifying how the cluster alias node address is to be used in relation to incoming and outgoing connections for specific network objects. By default, all objects except PHONE are able to receive connect requests directed to the alias node identifier. For outgoing connections, the default is that only the MAIL object is associated with the alias node address. If you send mail from a cluster node that uses the alias, the sender's address on the mail message is the alias node identifier.
You should not specify the alias node address for objects that require multiple incoming links, because an incoming link identified by the alias node address may be assigned to any of the nodes participating in the cluster alias node address. For example, PHONE should not use the alias node address, because it requires all incoming links to be directed to the same node in the cluster. Also, objects whose resources are not available clusterwide should not be allowed to receive incoming connect requests addressed to the alias node address.
2.6.3. Creating DECnet for OpenVMS Network Server Processes
All DECnet objects run as processes on the OpenVMS operating system. Unless a currently running process has declared itself to be a numbered network object or a named network object (with number 0), NETACP must create a process to receive the connect request.
When the logical link request comes in, a standard procedure called NETSERVER.COM is run, which in turn causes NETSERVER.EXE to be executed. This program works in concert with NETACP to invoke the proper program for the requested object. Then, when the logical link is disconnected, the object program (such as FAL) terminates, but the process is not deleted. Instead, control returns to the NETSERVER.EXE program, which asks NETACP for another incoming logical link request to process.
This cycle continues until NETSERVER is deleted after a specified time limit. The default is 5 minutes. To use a different default time limit, specify the SYSTEM logical name NETSERVER$TIMEOUT, using an equivalence string in the standard ‘‘delta time’’ format:
dddd hh:mm:ss.cc
The effect of NETSERVER is to reuse network server processes for more than one logical link request, eliminating the overhead of process creation for an often-used node. NETACP reuses a NETSERVER process only if the access control on the connect request matches that used to start the process originally.
The process is logged in according to information found in the UAF. The key to this file is the user name, which is part of the access control information. The process is successfully logged in only if the password from the access control string matches the password in the UAF record. (Refer to Section 2.8, ''Network Access Control'' for a discussion of DECnet access control.)
DECnet for OpenVMS automatically creates a log file in SYS$LOGIN:NETSERVER.LOG. Unlike the log file for a batch job, this log file is neither printed nor deleted. The log file is helpful for debugging your own network tasks. If NETSERVER.LOG cannot be created for any reason, the network job continues running but does not produce any log file.
The login command procedure indicated in the UAF for the process is executed.
The process runs a command file to start the image that implements the DECnet object. The rules for locating this command file differ depending on whether the object has the number 0.
Because NETSERVER.LOG files are not required for network server processes, you may explicitly inhibit all log files in your default nonprivileged DECnet account by setting the default directory for the account to a nonexistent directory. The effect of this action is to suppress all log files, while allowing network jobs to be run.
2.6.4. Potential Causes of Network Process Failures
If a logical link fails and the status information displayed is ‘‘network partner exited,’’ this message indicates a problem in the remote network server process. To determine the details of the failure, consult the NETSERVER.LOG file at the remote node. Common reasons for failure are as follows:
Inability to log in because of failure to access the system login procedure, or the account login procedure or any files that it accesses.
Protection incorrectly set on network procedures and images in SYS$SYSTEM, such as NETSERVER.COM or NETSERVER.EXE.
Attempted execution in your LOGIN.COM file of an interactive command that does not apply to network/batch jobs (for example, a SET TERMINAL/VT100 or SET TERMINAL/INQUIRE command). Do not specify these commands in your LOGIN.COM file unless they are preceded by IF F$MODE() .EQS.‘‘INTERACTIVE’’.
For example, in your LOGIN.COM file, use the following to prevent a logical link failure:
$ IF F$MODE() .EQS. "INTERACTIVE" THEN - SET TERMINAL/VT100
Any failure to create NETSERVER.LOG causes a network job to continue running, but without a log file.
2.7. Logging
Circuit and node counter activity
Changes in circuit, line, and node states
Service requests (when a circuit or line is put in an automatic service state)
Passive loopback (when the executor is looping back test messages)
Routing performance and error counters (circuit, line, node, and data packet transmission)
Data transmission performance and error counters (when errors in data transmission occur)
Lost event reporting (when some number of events are not logged)
This information can be useful for maintaining the network because it can be recorded continuously by the event logger. The system manager is responsible for controlling certain aspects of event logging. In particular, you can control source-related parameters (actual events to be logged, the source for these events, and the location at which these events will be logged) and sink-related parameters (the name of the logging component at the local node and its operational state).
For the most part, events are logged for the various DNA layers and for system-specific resources. Events are defined by class and type, in the format class.type. The class of an event identifies the layer or resource to which the event applies, and the type is the particular form of event within the class. For example, event 4.3 indicates oversized packet loss (type 3) for the Routing layer (class 4). Event classes and types are summarized in the VSI OpenVMS DECnet Network Management Utilities.
A logging console, which is generally a terminal or file that records events in user-readable form. If you do not specify a logging console name, the operator console (OPA0) is used.
A logging file, in which events are recorded in binary format. You can obtain detailed information about the format from the DNA Phase IV Network Management Functional Specification. There is no default logging file name.
A logging monitor, which is a program supplied by the system or user that receives and processes events. If you specify a logging monitor, events formatted in user-readable form are sent to the Operator Communication (OPCOM) facility; all network operator terminals (terminals enabled through specification of the DCL command REPLY/ENABLE=NETWORK) display these events. Also, if you specify a logging monitor name, events encoded in binary format are sent to the DECnet object specified by that name. You can obtain detailed information about the format from the DNA Phase IV Network Management Functional Specification.
You can use both the logging console and the logging monitor to display events at the operator console; however, the inherent flexibility of OPCOM and its ability to display messages at terminals being used for time sharing may make the logging monitor a more suitable choice for many sites.
The source of an event can be an area, node, module, circuit, or line. Events can be logged at either the local node or a remote node; this node is called the sink node.
At the local node, you can control the operational state of the logging sink. You must turn logging on before events can be logged to the sink, and off before the logging parameters for the sink can be cleared from the database. You specify the hold state to queue events for a specific logging sink.
2.8. Network Access Control
Routing initialization passwords for links connecting the local node to remote nodes
System-level access control for inbound logical link connections that result in a process being created
Node-level access control for inbound and outbound logical links
Proxy login access control for individual accounts
The following sections describe these levels of control as they relate to DECnet for OpenVMS software operation, from the perspective of the system manager's need to establish control parameters through NCP. Chapter 3, "Managing and Monitoring the Network" describes how to use specific NCP commands to accomplish access control.
2.8.1. Routing Initialization Passwords
Whenever you turn on a circuit, your local node attempts to initialize with the DECnet software at the remote node connection for that circuit. As part of this initialization process, the remote node may require a password to complete the operation. The system manager can specify passwords when setting up the configuration database.
In a Phase IV network, passwords are required when a Phase III node is initialized, but are optional when a Phase IV node is initialized. Generally, passwords are used in initializing Phase IV nodes only when a system has dialup telephone lines used by the network. When a dialup node seeks a dynamic connection over a terminal line, the dialup node must supply a password, but the node receiving the login request does not send a password to the dialup node.
Figure 2.3, ''Routing Initialization Passwords'' illustrates a routing initialization sequence for the network example. When the circuit is turned on, nodes BOSTON and TRNTO initialize. On the local node, BOSTON, DECnet for OpenVMS software retrieves the transmit password for remote node TRNTO and sends it to TRNTO upon request. On node TRNTO, DECnet for OpenVMS verifies this password with the receive password specified for remote node BOSTON in its configuration database. After the passwords are verified, the link is operational; that is, the circuit state makes the transition from ON-STARTING to ON.
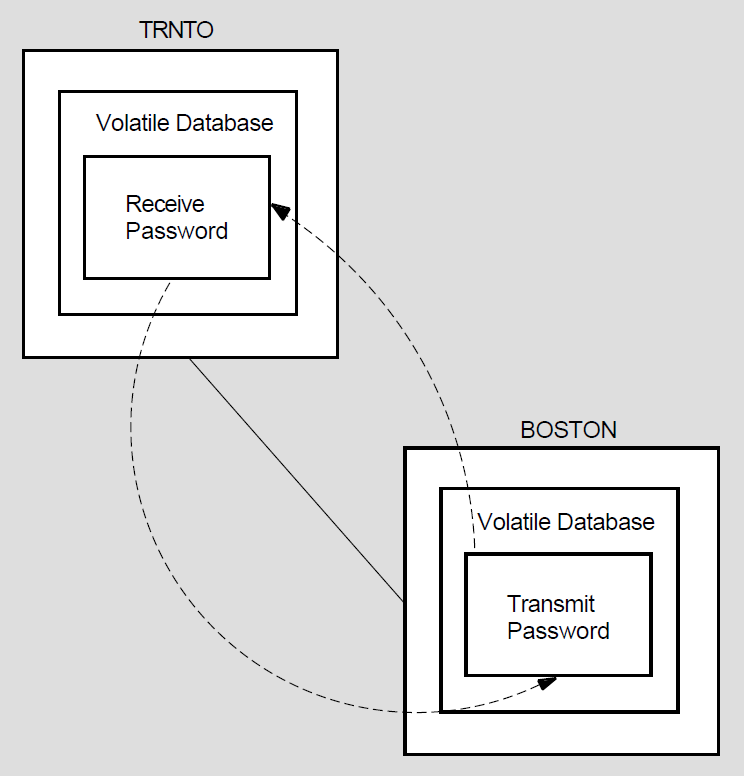
DECnet for OpenVMS always solicits a receive password. However, if verification on the circuit is disabled, or if no receive password is specified in the database for the adjacent node, DECnet for OpenVMS accepts anything the adjacent node may send. The adjacent node is still required to send the verification message.
2.8.2. System-Level Access Control
DECnet for OpenVMS provides system-level access control over logical link connections. The network user on the initiating node may explicitly supply an access control string to control which account is used on the remote node. If, however, the initiating node does not supply explicit access control information, DECnet optionally provides default access control when sending the request to the remote node. It also optionally provides default access control for incoming logical links if the initiating node has not supplied access control information.
2.8.2.1. Setting Access Control Information for Outbound Connects
The system manager can specify default access control information for outbound connections. This enables the local node to send outbound logical link requests with default access control information when that information is not explicitly provided. The remote node stores the access control information in its configuration database. The default access control information can include privileged and nonprivileged names and passwords to be used in connecting to a particular remote node.
The system manager at a node can specify a list of privileges required for connection to a particular object, such as NML. When the local node requests connection to an object for which privileges have been specified, it sends the default privileged access control string to the remote node. If the system manager does not specify privileges for an object, such as FAL, the object is accessible to all users. When the local node requests connection to this object, it sends the nonprivileged access control string.
2.8.2.2. Sources of Access Control Information for Logical Link Connections
The network user on the local node may explicitly supply an access control string. If this is the case, the remote node uses the access control information.
If the access control string is not explicitly supplied, the local node checks its object database against the privileges of the initiating process. If the object does not require privileges other than TMPMBX and NETMBX, the local node sends the default nonprivileged access control string from its node database to the remote node.
If the object requires privileges beyond TMPMBX and NETMBX, and the user process has the required privileges, the local node sends the default privileged access control string from its node database to the remote node.
If no access control string is supplied, the local node checks to see if proxy access is enabled for the remote node. If so, LOGINOUT at the remote node checks the NETPROXY.DAT file to determine whether a user should be logged in to a designated account rather than the nonprivileged account. (Proxy login access control is described in Section 2.8.5, ''Proxy Login Access Control''.)
If none of these cases are valid, the local node sends a "no" access control string.
When the remote node sees that no access control has been specified, it checks its object database. If the object database contains a default inbound access control string, the remote node uses that string.
If there is no default access control information in its object database, the remote node checks its executor node database for nonprivileged account information for itself. If the information is there, the remote node uses the nonprivileged access control string.
Note
In DECnet for OpenVMS usage, nonprivileged means NETMBX and TMPMBX privileges only. NETMBX is the minimal requirement for any network activity. Privileged means any privileges in addition to NETMBX or TMPMBX.
Figure 2.4, ''Access Control for Inbound Connections'' illustrates the local node's access control options for inbound connection requests.
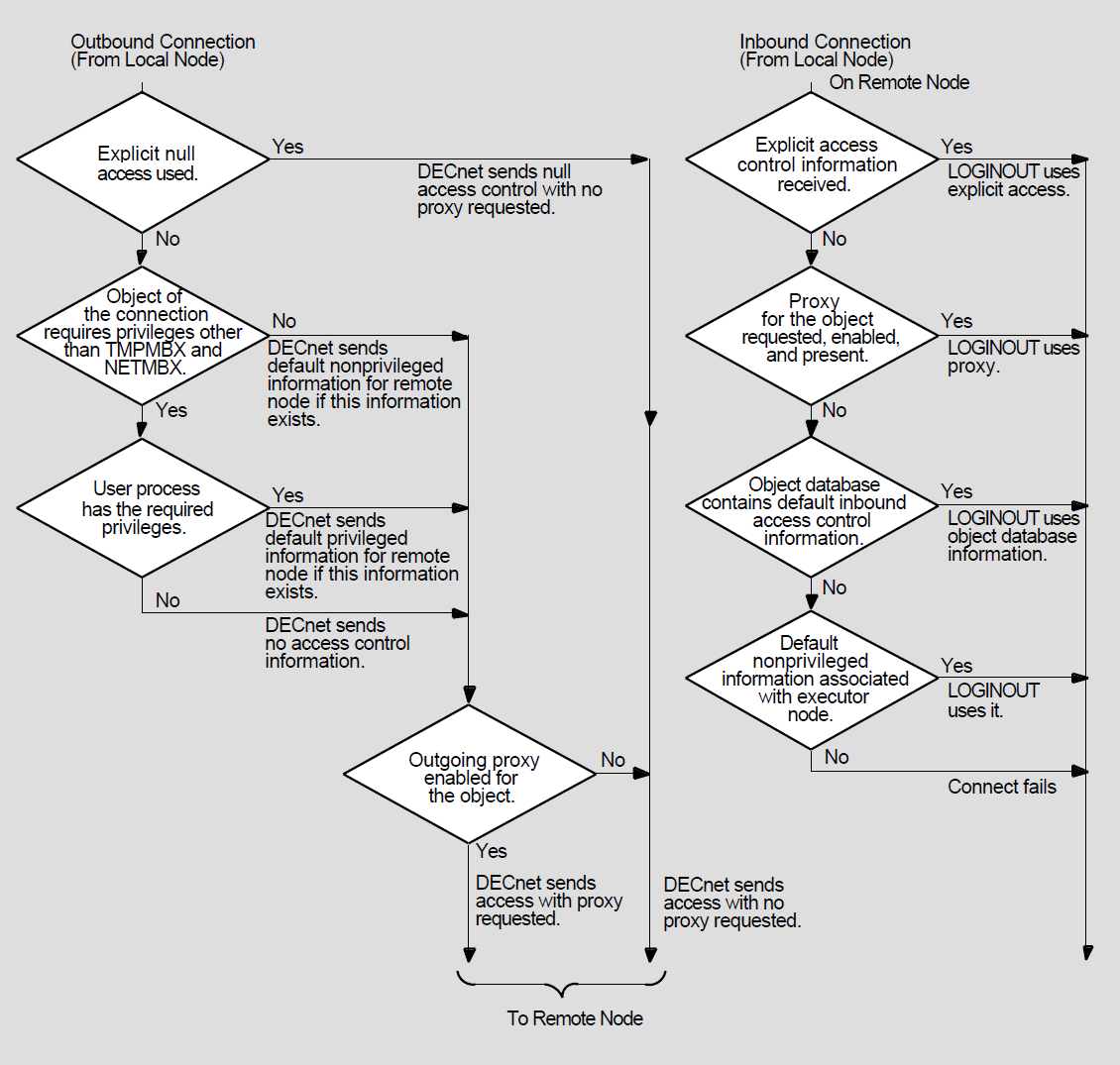
Regardless of the source, the remote node uses this access control information to determine whether a logical link can be established. The way this validation process works is important for both the system manager and network users. This section discusses access control in terms of network management. Chapter 8, "Performing Network User Operations" discusses access control as it relates to user-level operations such as remote file access and task-to-task communication.
Access control information is not used where the connection is to a program that has declared a name or object number and has started independently of DECnet.
Access control information allows users on remote nodes to gain access to resources on the local node. The system manager must establish access control information in both the configuration database (for objects) and the UAF (for default network accounts) on the local node. Chapter 1, "Overview of DECnet for OpenVMS" briefly describes the necessity for these default accounts. Chapter 5, "Configuring a Network" explains how to create a default nonprivileged DECnet account.
Whenever NETACP on the local node receives an inbound logical link connection request, it creates a process and starts the LOGINOUT image, which verifies the user's access rights by checking the UAF. When the VMS operating system starts a user process as a result of an inbound connection request, the privileges with which that process runs are determined by the UAF record associated with the access control information passed in the connection message. This function is almost identical to the one that occurs whenever a local user starts a batch job; the difference is that the resulting LOG file is neither printed nor deleted. Section 2.6, ''Objects'' discusses this process in detail.
2.8.2.3. Network Security and Passwords
You can maintain password security in a network environment by protecting the network configuration files from unauthorized access. The most convenient way to do this is to require SYSPRV to access these files. NML must have access to network configuration files. NML on the remote node accesses these files when it sees the NCP commands that access the permanent database (DEFINE, PURGE, LIST, and SET "component" ALL).
Table 5.1, ''Privileges for NCP Operations'' lists the privileges you need to perform network operations.
Avoid assigning privileges beyond those normally used. In particular, do not give the default privileged account SYSPRV. Place these default accounts in their own group to avoid extending group access to other directories on the local node. You can protect sensitive files and directories against world access by requiring explicit access control to reach them.
2.8.2.4. Inbound Default Access Control for Objects
Another form of access control specific to network objects is default account information used by inbound connects from remote nodes that send no access control information. Because no access control information is supplied, the default information you specify for the object is used to allow the logical link connection to be made.
2.8.3. Access Control for Remote Command Execution
If you request an NCP command to be executed at a remote node, you can supply an explicit access control string or default to access control information in the configuration database. To supply an explicit access control string, you use either the standard OpenVMS node specification node"user password account":: or specify this access control information as parameters in the NCP command to be executed at a remote node.
2.8.4. Node-Level Access Control
The system manager can regulate two forms of node-level access control for incoming and outgoing logical links. One form involves specifying the ACCESS parameter for a particular node in your volatile database, and the other involves specifying the DEFAULT ACCESS parameter in your executor database.
When an incoming or outgoing logical link connection is attempted, the executor node first checks its volatile database for the ACCESS entry for the target node. If the entry exists, the executor uses it.
Because it may not be feasible to include an ACCESS entry for every node in a large network, DECnet for OpenVMS provides the DEFAULT ACCESS alternative. If the logical link connection is attempted and there is no ACCESS entry for the remote node in the volatile database, the executor uses the DEFAULT ACCESS parameter value.
| INCOMING | Allows logical link connections from the remote node, but does not allow the local node to initiate connections to the remote node. |
| OUTGOING | Allows the local node to initiate connections to the remote node, but does not allow connections from the remote node. |
| BOTH | Allows incoming and outgoing logical link connections. This is the default. |
| NONE | Does not allow incoming or outgoing logical link connections to this node. |
If you specify no entry for the ACCESS or DEFAULT ACCESS parameter, the DEFAULT ACCESS parameter defaults to BOTH.
Only those users with OPER privilege can bypass this access protection.
For each node, you can configure the privileged and nonprivileged accounts and passwords that constitute default access control information. This default access control information should match the system-level access control information established for the node (see Section 2.8.2, ''System-Level Access Control'').
Another form of access control at the node level is the node checking that is performed before a system can dial in and form a dynamic asynchronous connection over a terminal line. For a description of security measures for dynamic asynchronous connections, see Section 2.8.6, ''Security for DDCMP Point-to-Point Connections''.
2.8.5. Proxy Login Access Control
Proxy login allows a user at a remote node to log in to a specific account at a local node, without having to supply any access control information. Proxy login is not the same as interactive login. Proxy login means that specific network access operations can be executed. By contrast, interactive login requires a user to supply a username and password before the user can perform any interactive operations.
In order to establish proxy login to an account on the local node (without specifying any access control information), the remote user must have a default proxy on the local node that maps to a local user account. The remote user assumes the same file access rights as the local account and also receives the default privileges of the local account.
You can use the proxy login capability to increase security, because it minimizes the need to specify explicit access control strings in node specifications passed over the network or stored in command procedures.
Network objects can also be assigned proxy login access.
The following sections summarize the procedures for establishing proxy accounts and for establishing proxy access to network objects.
2.8.5.1. Proxy Accounts
Proxy accounts permit users on remote nodes to obtain access rights on other nodes without having private accounts on those nodes. The remote user can enter commands to access data that is accessible by one or more local accounts to which that remote user has proxy access.
LARK::KELLEY RSTS::[23,55]
In the first example, the remote user is identified by the node name LARK and user name KELLEY. The second example specifies that a UIC is to be used instead of a user name to identify the user as member 55 in group 23.
In the permanent proxy database, each remote user may be mapped to one default proxy account and up to 15 additional proxy accounts on the local node. With a default proxy account, the remote user does not need to specify a user name or password when requesting proxy login. With a nondefault proxy account, the remote user must include a user name only.
For a summary description of proxy accounts and how to create them, see the VSI OpenVMS Guide to System Security.
2.8.5.2. Controlling Proxy Login Access for Individual Accounts
The permanent proxy database resides in NETPROXY.DAT. All management and maintenance of this database is handled through the Authorize Utility. NETPROXY.DAT is updated automatically any time you use the Authorize Utility to make any changes to proxy logins. When DECnet is started up, the information in NETPROXY.DAT is used to construct a volatile database in the NETACP process. NETACP consults this volatile database when incoming proxy login requests are received at the local node. When you change the proxy database, the volatile database is updated if DECnet is running.
When the local node receives a request for initiation of an inbound connection, and if no access control string is supplied and the remote node is enabled for outgoing proxy login access, the local system checks to see if the object has incoming proxy enabled. If proxy access is enabled, NETACP checks its volatile database to determine whether the user should be allowed to log into a designated account.
By default, both incoming and outgoing proxy login access are enabled at the local (executor) node. Consequently, incoming and outgoing proxy login access is permitted with all remote nodes. These default values are established by DECnet for OpenVMS to permit proxy logins to be initiated by the local node or by the remote node. These default values are the recommended settings.
|
INCOMING PROXY enabled |
Allows proxy login access from the remote node to the local node. |
|
INCOMING PROXY disabled |
Prevents proxy login access from the remote node to the local node. |
|
OUTGOING PROXY enabled |
Allows the local node to initiate proxy login access to the remote node. |
|
OUTGOING PROXY disabled |
Prevents outgoing proxy login access connections from the local node. |
2.8.5.3. Controlling Proxy Login Access for Objects
Just as you can control proxy login access by individual accounts, you can control proxy login access by network objects. You control proxy login access to a specific network object by setting the value of the object parameter PROXY in the configuration database. The database contains defaults for each object. Permitting proxy login access to an object is recommended only if the proxy access serves some useful purpose. For example, by default MAIL is set to prevent incoming proxy login, while FAL is set to allow both incoming and outgoing proxy login.
Note that whatever you declare for the object proxy database takes precedence over the values declared in the executor proxy database.
|
INCOMING |
Allows proxy login to the object. |
|
OUTGOING |
Allows the object to initiate proxy login. |
|
BOTH |
Allows both incoming and outgoing proxy login access. This is the default. |
|
NONE |
Does not allow incoming or outgoing proxy login access. |
Note that there are advantages to disallowing incoming proxy access to an object (such as MAIL) that does not require it. Whenever possible, incoming connect requests are matched up with compatible existing NETSERVER processes, to avoid the overhead of unnecessary process creation. If the object disallows incoming proxy access, incoming connect requests will use default access control, with a higher probability of being matched with an existing NETSERVER process.
2.8.6. Security for DDCMP Point-to-Point Connections
On systems that support DDCMP, if a remote node requests a connection over a DDCMP point-to-point circuit, the local node can avoid revealing its routing initialization password, while requiring that the remote node supply its password. This security measure is used to protect the password of the local node when a dialup node initiates an asynchronous connection to the local node.
For example, a user at a system with an asynchronous terminal line (such as DECnet for OpenVMS software running on a MicroVAX) can dial in to another system (such as a DECnet for OpenVMS system in a VMScluster) and initiate a dynamic connection. This connection causes the terminal lines to be converted to asynchronous DDCMP communication lines for the duration of the telephone call.
To prevent attempts at access by callers at unauthorized nodes, certain checks have been included in the dynamic configuration process, as follows:
The dialup node must be the type of node (router or end node) expected by the local node.
When the dialup node attempts to initialize, it must supply a routing initialization password to the local node, although the local node does not send its password to the dialup node. The line will not be started unless the password can be verified at the local node. This convention preserves the security of the local node in case the dialup node is unauthorized.
The line will not be started unless the transmit password sent matches the local receive password.
Depending on how you set up the terminal line, the connection can be configured to end automatically when the telephone is hung up.
Chapter 3. Managing and Monitoring the Network
Configuration database
Network Control Program (NCP)
Executor node and remote nodes
Circuits
Lines
Links
Objects
Logging
Access control
Routing
This chapter provides enough information for you to build a network configuration database for your system. It also explains how to use most NCP commands at both the local node and remote nodes to modify parameters for the running network. See Chapter 5, "Configuring a Network" for examples that use NCP commands to build databases for various network configurations.
Chapter 2, "DECnet for OpenVMS Components and Concepts" describes DECnet for OpenVMS network components and operating concepts. The VSI OpenVMS DECnet Network Management Utilities contains reference information about the operation of the Network Control Program (NCP) Utility, DTS/DTR testing and the complete syntax of NCP commands.
3.1. The DECnet for OpenVMS Configuration Database
A node database with a record for each node, including the local node
A circuit database with a record for each circuit known to the local node
A line database with a record for each physical line known to the local node
A logging database with a record for each sink (logged events are sent to the sinks)
A default object database with a record for each object known to the network, including objects (for example, FAL) that are defined when you bring up the local node.
As system manager, you need to specify the nodes that can communicate with your node, the physical lines that connect the nodes, and the circuits associated with those lines. In some cases, this connection may include more than one line and circuit to the remote node. You also need to establish a variety of operational routing parameters for the local node to ensure proper network operation.
To provide network management flexibility, the DECnet for OpenVMS configuration database consists of two distinct databases, one volatile and one permanent.
3.1.1. The Volatile Database
The volatile copy of the DECnet for OpenVMS configuration database is memory resident; it allows you to control the running network without modifying the permanent database. NCP provides commands for setting, clearing, and showing network component parameters for the volatile database. NCP also permits you to copy current information about remote nodes from the node database of another node into your volatile database.
You can change parameters in the volatile database while the system is running; these changes, however, are in effect only until you modify them again or until the network is shut down.
3.1.2. The Permanent Database
The permanent copy of the DECnet for OpenVMS configuration database provides the initial values for the volatile database. You access the permanent database whenever you use the ALL parameter with the SET command, for example, when you bring up the network. In effect, the permanent database allows you to load network parameters into the volatile database when you boot the system. You can also change parameters in the permanent database.
You can use NCP commands to define, purge, and list network component parameters in the permanent database. You can also use NCP to copy current remote node entries into your permanent node database from the database of another node to which you have access.
For a new system, instead of entering the NCP commands yourself, you can use the NETCONFIG.COM procedure to configure the permanent database. See Section 5.2, ''Configuration Procedures'' for details. The NETCONFIG_UPDATE.COM procedure may be used if your system already has been configured and you want to modify default account information for Digital-supplied network objects. See Section 5.2.2.2, ''NETCONFIG_UPDATE.COM for Existing Network Configurations'' for information about the NETCONFIG_UPDATE.COM procedure.
3.2. The Network Control Program
The Network Control Program (NCP) is the vehicle for creating and modifying component parameters in the configuration database. In addition to the NCP command interface, DECnet for OpenVMS users can write programs that communicate with NML through the Network Information and Control Exchange (NICE) protocol. For information about this interface, refer to the DNA Phase IV Network Management Functional Specification.
NCP> DEFINE NODE 14 NAME DENVER
NCP> SET NODE 14 NAME DENVER
| Function | Volatile | Permanent |
|---|---|---|
| Creating/modifying parameters | SET | DEFINE |
| Clearing parameters | CLEAR | PURGE |
| Displaying parameters | SHOW | LIST |
Because the commands to access the volatile and permanent databases are similar, this section uses volatile database commands in all examples.
When configuring your network, you can use NCP either to build upon previously specified information or to change that information. Thus you do not have to delete all existing parameters and start over. For example, assume that you have identified a remote node address. You can add node parameters for this record in the volatile database by using the SET NODE command. If you want to change the address of this node, you need to specify a new address only in the ADDRESS parameter of the SET NODE command. If you decide later that you want to remove any or all parameters for this node, then you could use the CLEAR NODE command. Commands to remove parameters exist for all network components.
$ RUN SYS$SYSTEM:NCP
NCP> SET NODE 11
NAME BOSTON COUNTER TIMER 30
NCP> SET KNOWN LOGGING STATE ON
.
.
.
NCP> SET EXECUTOR STATE ONNCP> SHOW NODE BOSTON COUNTERS
.
.
.
NCP> SHOW KNOWN NODES COUNTERS
.
.
.Most NCP commands support both singular and plural component names.
NCP accepts the asterisk (*) and the percent sign (%) as wildcard characters. You can include these wildcard characters on the NCP command line to represent a group of component names. Using a wildcard character allows you to refer to an NCP component by a general name, rather than by a specific name.
Node name
Line name
Circuit name
Object name
Node address
Events
The asterisk wildcard represents one or more characters, while the percent sign represents a single character.
- If the component name is a string, the wildcard character may occur at any location in the string. For example:
NCP> LIST NODE ST%R STATUS NCP> SHOW OBJECT M* CHARACTERISTICS
The first command requests a list of status information for all nodes with four-letter node names beginning with "ST" and ending with "R." The second command requests a listing of characteristics for all objects with names beginning with "M."
- For node addresses, which are represented by the format area-number.node-number, only the node-number portion of the node address (the numeral on the right side of the period) can contain a wildcard. For example, the following command sets a COUNTER TIMER value of 45 seconds for all nodes in area 4:
NCP> SET NODE 4.* COUNTER TIMER 45
Specifying a node address such as *.5 is invalid because only the node-number can contain a wildcard.
In a node address, a wildcard character cannot be combined with a numeral to represent a node-number. The node addresses 4.* and 4.% contain valid uses of the wildcard characters, but the node addresses 4.%2 and 4.1* are invalid.
- For events, which are represented by the format class.type, only the type portion of the event (the numeral on the right side of the period) can contain a wildcard. For example, the following command specifies that all class 2 events are to be logged:
NCP> SET KNOWN LOGGING EVENTS 2.*
- Except in the case of events, only component names can contain wildcards. Parameter values cannot contain wildcards. The following command is invalid because the circuit name SVA-* is not the component name in the command. Rather, it is a parameter used to modify the component named BOSTON. Only component names can be represented by wildcard characters.
NCP> SET NODE BOSTON SERVICE CIRCUIT SVA-* !INVALID COMMANDThe component name EVENT is used as a parameter to the LOGGING commands, and can contain wildcard characters, as long as only the type portion of the event number (the numeral to the right of the period) contains the wildcard. For example, the following command clears logging to the logging file for all class 2 events:NCP> CLEAR LOGGING FILE EVENTS 2.*
- Unit numbers of circuit and line devices may contain wildcard characters, but device names of circuits and lines cannot contain wildcard characters. Circuit and line devices are typically identified by the format dev-c, where dev is a mnemonic device name, and c is a device unit number. In the following example, the asterisk replaces the unit number in this request for circuit information for all SVA devices:
NCP> SHOW CIRCUIT SVA-*
However, the device-name portion of a circuit or line name cannot contain wildcard characters. Therefore, the following commands are invalid:NCP> SHOW CIRCUIT D* STATUS !INVALID COMMAND NCP> SHOW LINE %NA-0 SUMMARY !INVALID COMMAND
NCP> SHOW NODE * STATUS
NCP> SHOW KNOWN NODES STATUS
For a detailed description of NCP operation, the syntax of NCP commands, and examples of NCP command prompting, refer to the VSI OpenVMS DECnet Network Management Utilities.
3.3. Node Commands
To establish your VMS operating system as a node in the DECnet network, you must build the node database entries for the DECnet for OpenVMS configuration database. The following sections describe identification of the executor node and remote nodes, and the node parameters required to build an operational network node database. They also discuss how to update your node database by copying current information about remote nodes from another node to which you have access.
3.3.1. Executor Node Commands
NCP allows you to manage the operation and configuration of both your local node and remote nodes in the network. Generally, the NCP commands you enter at your local node are executed on that node. Occasionally, however, you may want to enter commands from the local node to be executed on adjacent or remote nodes. To this end, NCP incorporates the concept of an executor node. The executor node is the node on which NCP functions are actually performed, which in most cases is the local node. To perform NCP functions on remote nodes, NCP supports two commands: SET EXECUTOR NODE and TELL.
3.3.1.1. SET EXECUTOR NODE Command
The SET EXECUTOR NODE command sets the executor to the node at which you want the commands to execute. One use of this feature is to display information about the configuration database of the remote node. Figure 3.1, ''Remote Command Execution'' illustrates this use of a remote executor node.
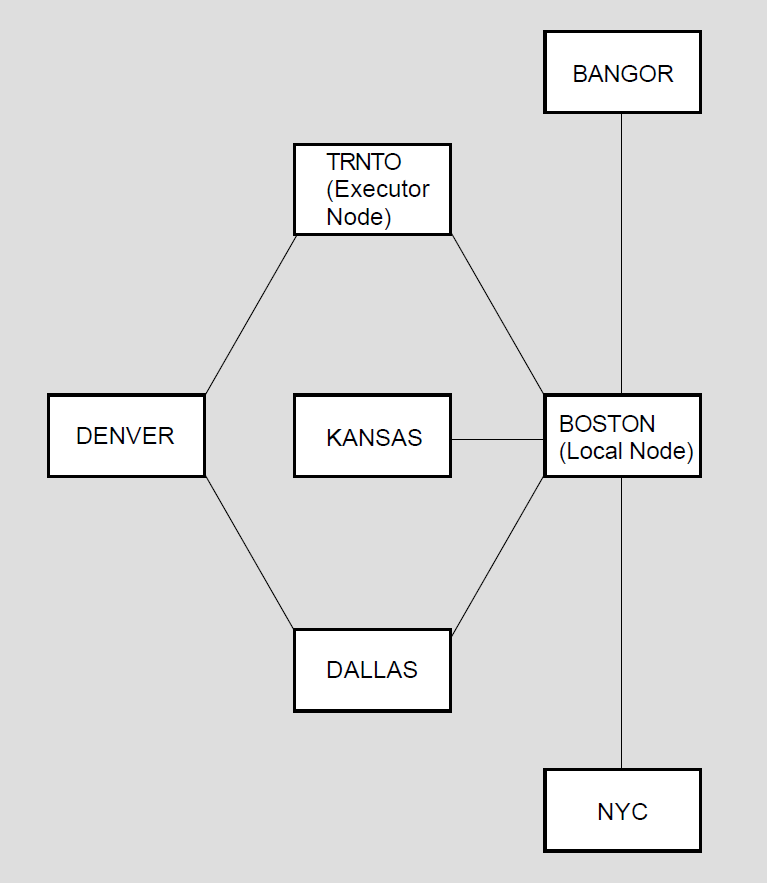
NCP> SET EXECUTOR NODE TRNTO
NCP executes commands that you enter at your local node, BOSTON, at the remote executor node, TRNTO. The executor node interprets each command with its own network management software, and then performs the NCP function. In this example, any information output that results from the execution of a command is displayed at node BOSTON.
NCP> CLEAR EXECUTOR NODE
The executor is always the local node when NCP is activated. Several users at one node can set their executor to different nodes.
Note
When you clear the executor node, NCP communicates with NML as a shared image in the same process. Hence, clearing the executor node resets the executor's privileges to those of your current process—that is, the process running NCP.
3.3.1.2. TELL Prefix
NCP> TELL TRNTO SHOW KNOWN LINES
Remote execution in this case applies only to the one command entered with the TELL prefix. Again, you can specify or default to access control information.
3.3.2. Node Identification
When configuring the network, you must identify in the executor configuration database the local node and all adjacent nodes connected to it by circuits. Identifying all nodes by name as well as address permits you to reach any node by its name. This section describes node identification and discusses NCP parameters relevant to identifying nodes.
area-number.node-number
For example, if node 3 is in area 7, its node address is 7.3. The area number must be unique within the network and the node number must be unique within the area. If you do not specify an area number, the area number of the executor node is used. The default area number for the executor is area 1. In multiple-area networks, you should always specify the area number.
A node name is an optional, unique alphanumeric string that contains up to six characters including at least one alphabetic character. You can use it interchangeably with the node address to identify a node. In single-area networks, the default area is 1. In the single-area network example, Figure 1.1, ''DECnet Functions and Related DNA Layers and Protocols'', the node name BOSTON and the node address 1.11 identify the same node.
NCP> SET NODE 5 NAME TRNTO
NCP> SET EXECUTOR ADDRESS 11
NCP> SET NODE 11 NAME BOSTON
By entering these commands, you have established a remote node (TRNTO) whose address is 1.5 and the local node (BOSTON) whose address is 1.11. You can then build upon this information to establish parameters for the various nodes.
Before a node can be accessed by name, you must specify a node name to be associated with a node address.
NCP> SET NODE TRNTO ADDRESS 6 NCP> SET NODE TRNTO ADDRESS 8
3.3.2.1. Local Node Identification Parameter
NCP> SET EXECUTOR IDENTIFICATION "Accounting Department"
NCP> SHOW EXECUTOR Node Volatile Summary as of 15-JUN-2020 11:27:07 Executor node = 1.11 (BOSTON) State = on Identification = Accounting Department
3.3.2.2. Using and Removing Node Names and Addresses
NCP> SHOW NODE 5 CHARACTERISTICS
.
.
.
NCP> SHOW NODE TRNTO CHARACTERISTICS
.
.
.NCP> CLEAR NODE 5 NAME TRNTO
NCP> CLEAR NODE TRNTO ALL
.
.
.
NCP> CLEAR KNOWN NODES ALLNote
To change the ADDRESS, BUFFER SIZE, ALIAS NODE, MAXIMUM BROADCAST ROUTERS, MAXIMUM CIRCUITS, NAME, SEGMENT BUFFER SIZE or TYPE parameters for the executor, first turn off the executor. For information about how to change the local node’s operational state, refer to Section 3.3.4.2, ''Operational State of the Local Node'' and Chapter 6, "Installation of a Network".
3.3.3. Identifying Cluster Nodes
For many network operations, it is convenient to be able to treat nodes within a homogeneous VMScluster as though they were a single node in a DECnet network. You can do this by establishing an alias node identifier for the cluster. You can specify the alias node identifier as either a unique node address or a corresponding node name. Any member node can elect to use this special node identifier as an alias while retaining its own unique node identification. Use of the cluster alias node identifier is optional.
Will an individual node participate in the use of a cluster alias node identifier?
If a node participates, does it want to receive inbound connect requests targeted to the cluster alias address?
For any object defined on a participating node, should the object's logical links appear to have originated from the cluster alias node and should the object be able to receive incoming connect requests that are directed to the cluster alias address?
To establish an alias node identifier for a local node, use the SET EXECUTOR or DEFINE EXECUTOR command with the ALIAS NODE parameter, described in Section 3.3.3.1, ''Setting an Alias Node Identifier for the Executor''. To enable incoming requests to the cluster alias node address, use the ALIAS INCOMING parameter of the SET EXECUTOR or DEFINE EXECUTOR command, as described in Section 3.3.3.2, ''Enabling Aliases for Nodes in a VMScluster''.
The SET OBJECT command allows you to associate specific objects with the cluster alias node identifier, by means of the ALIAS OUTGOING parameter. You can also use the ALIAS INCOMING parameter to permit specific objects to receive incoming connect requests sent to the cluster alias address. Section Section 3.9.1, ''DECnet for OpenVMS Objects'' describes how to identify DECnet for OpenVMS objects.
3.3.3.1. Setting an Alias Node Identifier for the Executor
You establish an alias node identifier for the local node using the SET EXECUTOR command with the ALIAS NODE parameter. When the local node includes an alias node identifier in its database, it can be accessed by either the cluster alias or its individual node name or node address.
NCP> DEFINE NODE 2.13 NAME CLUSTR
NCP> DEFINE EXECUTOR ALIAS NODE CLUSTR
By entering these commands, you establish a node (CLUSTR) whose address is 2.13. This is the cluster alias node. Its address and name appear in the database like those of all other nodes. From the viewpoint of any node in the network outside the cluster, address 2.13, which is named CLUSTR, appears to be a real DECnet node that can participate in two-way communication. This cluster alias acts as a single node identifier that all participating nodes in the cluster can use to communicate with other nodes in the DECnet network.
3.3.3.2. Enabling Aliases for Nodes in a VMScluster
When you manage the cluster alias node, you must decide whether participating nodes will accept incoming connect requests directed toward the cluster alias node identifier. You use the executor parameter ALIAS INCOMING to specify how incoming connect requests are to be handled. This parameter must be either enabled or disabled. To permit the node to accept incoming connect requests directed to the cluster alias node identifier, specify the ENABLED option. Otherwise, specify the DISABLED option to avoid receiving incoming connect requests directed to the cluster alias node identifier.
NCP> DEFINE EXECUTOR ALIAS INCOMING DISABLED
By default, the ALIAS INCOMING parameter is enabled for a node if an alias node identifier has been defined for the node.
3.3.4. Node Parameters
To establish information used to control various aspects of the local node’s operation within the network, you specify the SET EXECUTOR command. You can set several parameters with the SET EXECUTOR command. Specify the parameters ADDRESS and TYPE.
In addition, you may want to specify names, access control information, and node counter event logging information for any or all of the remote nodes in your network. If a remote node can be loaded downline, you can specify a number of default parameters to be used locally to perform a downline load or upline dump operation.
Executor parameters specify information used to control various operations specific to the local node. Node parameters specify information that is applicable to operations associated with both the local and remote nodes. The NCP SET EXECUTOR command is used to set executor parameters. The NCP SET NODE command is used to set node parameters for both the local and remote nodes.
When using the SET EXECUTOR command to establish or modify parameters, be sure to avoid combining in the same command, parameters that are listed under both the executor and node parameter columns in Table 3.1, ''Node Parameters and Their Functions'' with parameters that are listed under the executor parameter column only. For example, the following command is invalid and would receive the response shown:
NCP>DEFINE EXECUTOR ADDRESS 4.11 ALIAS NODE 4.16 %NCP-W-INVPGP, Invalid parameter grouping , Alias node
Table 3.1, ''Node Parameters and Their Functions'' lists node and executor parameters by function.
| Parameters According to Function | Executor Node | Remote Node |
|---|---|---|
| Access control | ||
|
ACCESS INCOMING OUTGOING BOTH NONE |
X | |
|
DEFAULT ACCESS INCOMING OUTGOING BOTH NONE |
X | |
|
INCOMING PROXY ENABLED DISABLED |
X | |
|
NONPRIVILEGED ACCOUNT account PASSWORD password USER user-id |
X |
X |
|
OUTGOING PROXY ENABLED DISABLED |
X | |
|
PRIVILEGED ACCOUNT account PASSWORD password USER user-id |
X |
X |
| DDCMP circuit connection control | ||
|
?INBOUND node-type ENDNODE ROUTER | X | |
| Declared objects | ||
| MAXIMUM DECLARED OBJECTS number | X | |
| Using the DECdns namespace | ||
|
?DNS INTERFACE ENABLED DISABLED ?IDP string ?DNS NAMESPACE dns-namespace |
X X X | |
| Downline loading | ||
|
CPU DECSYSTEM1020 PDP11 PDP8 VAX DIAGNOSTIC FILE file-spec HARDWARE ADDRESS hardware-address HOST node-id LOAD ASSIST AGENT file-spec LOAD ASSIST PARAMETER item LOAD FILE file-spec MANAGEMENT FILE file-spec SECONDARY LOADER file-spec SERVICE CIRCUIT circuit-id SERVICE DEVICE device-type SERVICE PASSWORD hex-password SOFTWARE IDENTIFICATION software-id SOFTWARE TYPE software-type MANAGEMENT FILE SECONDARY LOADER SYSTEM TERTIARY LOADER TERTIARY LOADER file-spec |
X X X X X X X X X X X X X X X | |
| Local node state | ||
|
STATE ON OFF RESTRICTED SHUT | X | |
| Loop node identification | ||
| CIRCUIT circuit-id | X | |
| Logical link control | ||
|
ALIAS MAXIMUM LINKS number BUFFER SIZE number DELAY FACTOR number DELAY WEIGHT number INACTIVITY TIMER seconds INCOMING TIMER number MAXIMUM LINKS number OUTGOING TIMER seconds PIPELINE QUOTA quota RETRANSMIT FACTOR number SEGMENT BUFFER SIZE |
X X X X X X X X X X | |
| Node identification | ||
|
ADDRESS node-address ALIAS NODE node-id IDENTIFICATION id-string NAME node-name |
X X X X |
X X |
| Routing control | ||
|
ALIAS INCOMING option ENABLED DISABLED ?AREA MAXIMUM COST number ?AREA MAXIMUM HOPS number BROADCAST ROUTING TIMER seconds ?MAXIMUM AREA number MAXIMUM BROADCAST NONROUTERS number MAXIMUM BROADCAST ROUTERS number MAXIMUM COST number MAXIMUM HOPS number ?MAXIMUM PATH SPLITS number MAXIMUM VISITS number ?PATH SPLIT POLICY policy INTERIM NORMAL ?ROUTING TIMER seconds TYPE node-type ?AREA ?ROUTING III ROUTING IV NONROUTING III NONROUTING IV |
X X X X X X X X X X X X X X X | |
| Routing initialization passwords | ||
|
?RECEIVE PASSWORD password ?TRANSMIT PASSWORD |
X X | |
| Timer for logging node counter events | ||
| COUNTER TIMER seconds | X | X |
| Upline dumping | ||
|
DUMP ADDRESS number DUMP COUNT number DUMP FILE number |
X X X | |
The CLEAR NODE command clears node parameters for either the local or remote nodes. The CLEAR EXECUTOR command clears executor parameters. You cannot clear the executor parameters BUFFER SIZE and STATE from the volatile database. You can, however, purge them from the permanent database with the PURGE EXECUTOR command.
After you set the executor’s state to ON, you cannot change the ADDRESS, ALIAS NODE, BUFFER SIZE, MAXIMUM CIRCUITS, MAXIMUM BROADCAST ROUTERS, NAME, SEGMENT BUFFER SIZE, or TYPE parameters.
3.3.4.1. Logical Link Control
Several executor parameters regulate various aspects of transport operation. Specify the size of NSP receive buffers and transmit buffers (segment buffers) and the number of buffers used to transmit on all circuits. NCP provides three executor parameters for this purpose: BUFFER SIZE, SEGMENT BUFFER SIZE, and MAXIMUM BUFFERS. Be careful to set the values for these parameters to a reasonable level, or system performance may suffer. The parameters all have reasonable default values.
Setting Buffer Sizes
NCP> SET EXECUTOR BUFFER SIZE 576
This parameter also controls the maximum segment size of all NSP messages that the local node can receive and forward. The buffer size value that you select is used for all lines. You cannot use the BUFFER SIZE parameter to select individual values for individual lines. You can, however, use the BUFFER SIZE parameter in the SET LINE command to override the BUFFER SIZE value set in the executor for specific lines, such as a particular Ethernet or FDDI line. (see Section 3.6.2.2, ''Buffer Size'').
The default BUFFER SIZE value is equal to the SEGMENT BUFFER SIZE if specified; otherwise, the default size is 576 bytes. At a minimum, the buffer size must be 192 bytes. For more information in this area, refer to Chapter 5, "Configuring a Network" and to the Network Services Protocol Functional Specification.
These buffers require nonpaged memory pool.
Faster lines perform better with large buffers and large user messages that reduce the processor load. (The smaller the segments, the more messages are processed.)
Lines that are error prone (for example, telephone lines) should use small buffers (256 bytes) to reduce both the probability and the cost of retransmissions.
The executor buffer size must not be larger than the maximum size supported by the datalink, for example, 1498 on Ethernet.
Note
Using the same buffer size for all nodes in your network is strongly recommended. Otherwise, nodes with smaller buffer sizes drop packets when you attempt to route through them.
Changing Buffer Sizes
You can change the size of the buffers on all nodes without bringing down the entire network by performing a two-pass conversion process involving a second parameter, the SEGMENT BUFFER SIZE, as well as the BUFFER SIZE parameter. The conversion process requires only that you set the local node to the OFF state while changing the buffer size.
NCP> SET EXECUTOR SEGMENT BUFFER SIZE 576
NCP> SET EXECUTOR BUFFER SIZE 576
The SEGMENT BUFFER SIZE normally has the same value as the BUFFER SIZE, but may be set to less in order to perform the buffer size conversion process.
Reset the value of the BUFFER SIZE parameter at each node to the larger size, permitting each node to receive a larger message.
Reset the value of the SEGMENT BUFFER SIZE parameter at each node to the larger size, permitting each node to transmit a larger message.
This two-step process ensures that all nodes are able to receive and forward larger messages before any node is able to transmit a larger message.
Reset the value of the SEGMENT BUFFER SIZE parameter at each node to the smaller size, decreasing the size message that each node can transmit.
Reset the value of the BUFFER SIZE parameter at each node to the smaller size, decreasing the size message all nodes can receive.
This process ensures that the size of messages that can be transmitted across the network is decreased before the size of the buffers that receive and forward messages is decreased.
NCP> SET EXECUTOR BUFFER SIZE 1000
NCP> SET EXECUTOR SEGMENT BUFFER SIZE 1000
Each node will first be able to receive and forward 1000-byte messages, and then will be able to transmit them.
Maximum Number of Buffers
NCP> SET EXECUTOR MAXIMUM BUFFERS 20
If you do not specify a value for this parameter, DECnet for OpenVMS provides a default value of 100. Thus, you do not have to specify a value unless you want to limit the amount of nonpaged pool used by DECnet for OpenVMS. For most operations, DECnet for OpenVMS allocates only as many buffers as it needs (even if you specify a greater number than the amount needed), and does not allocate more than the number of buffers you specify.
Maximum Number of Circuits
NCP> SET EXECUTOR MAXIMUM CIRCUITS 3
The default value for this parameter is 16.
You cannot change the value of the MAXIMUM CIRCUITS parameter while the executor is in the ON state.
3.3.4.2. Operational State of the Local Node
| OFF |
Allows no new logical links to be created, terminates existing links, and stops route-through traffic. The NETACP process exits. |
| ON |
Allows new logical links to be created. The ON state is the normal operational state allowing route-through traffic. |
|
RESTRICTE |
Allows no new logical links from other nodes, yet does not inhibit route-through. |
| SHUT |
Similar to RESTRICTED. However, after all logical links are terminated, the local node goes to the OFF state. |
Any network user with the OPER privilege can initiate or confirm a logical link connection even though the local node is in the RESTRICTED or SHUT state. Thus, a system manager can use NCP and NML when the network is in either of these states.
Note
Do not use the DEFINE EXECUTOR STATE OFF command for the permanent database because this command would cause the network processes to remain in the OFF state immediately after being started.
3.3.5. Copying Node Databases
You can update your node database by copying current information about remote nodes from the configuration database of any node to which you have access. Use the NCP command COPY KNOWN NODES to copy the volatile or permanent node database entries from a remote node to either or both the volatile and permanent node databases on your node. If you specify the WITH CLEAR or WITH PURGE qualifier on the COPY command, the local node database to which the information is to be copied is cleared or purged before the information is copied. Only the executor node characteristics and the name and address of the remote node are retained when the database is cleared or purged before a copy operation.
The COPY KNOWN NODES command permits you to update your existing node database to reflect current data on remote nodes without having to shut down your node. If your network is large, the COPY command provides you with a means of keeping up with frequent changes in the composition of the network. For example, one node on a broadcast circuit may serve as the master, keeping in its node database current information on all remote nodes that can be accessed over the network. Then, as other nodes come up on the same broadcast circuit, they can obtain the latest version of the node database by copying it from the master node.
If you did not specify any remote node entries when you configured your node, you can use the COPY command at any time to obtain the remote node entries that indicate the nodes to which you have access. If you want to copy the node database from a remote node that is not defined in your volatile database, you can specify the node's address in the COPY command; execution of the copy operation causes the name and address of the node to be defined in your database.
You cannot use COPY KNOWN NODES to copy a subset of a node database.
An alternative method for copying node database information is to use the DCL COPY command to copy the existing permanent database file located in SYS$SYSTEM:NETNODE_REMOTE.DAT, as described in Section 3.3.5.5, ''Copying the Permanent Node Database Using DCL COPY''.
3.3.5.1. COPY Command Parameters and Qualifiers
The COPY KNOWN NODES command causes the names and addresses of remote nodes to be copied from a remote database to the local node database or databases you specify. The FROM node-id parameter in the COPY command specifies the remote node from which the node database information is to be copied.
NCP> COPY KNOWN NODES FROM BOSTON"BROWN PASS123"
To indicate which node database at the remote node is to be copied, specify the USING VOLATILE or USING PERMANENT qualifier. If you do not specify the USING qualifier, the default value is USING VOLATILE.
NCP> COPY KNOWN NODES FROM BANGOR USING VOLATILE TO BOTH
If you do not specify the TO qualifier, the local database defaults to VOLATILE.
NCP> COPY KNOWN NODES FROM BANGOR USING PERMANENT - _ TO PERMANENT WITH PURGE
3.3.5.2. Clearing and Purging the Local Node Database
During a copy operation, if the volatile database is to be cleared, the entries for the executor node and any loop nodes are not cleared. If the permanent database is to be purged, however, the entry for the executor node is purged. Therefore, before the purge occurs, the copy operation causes the executor node characteristics to be saved: a LIST EXECUTOR CHARACTERISTICS command is executed and the executor characteristics are stored. After the purge is executed, the executor characteristics are reinserted in the local node database.
In addition, the local node must retain the name and address of the remote node from which it is to copy the data. Before the clear or purge operation is performed, the name and address of the remote node are saved. This information is reinserted in the local node database after the clear or purge operation is completed. Thus, to purge your database without purging your executor database, use the COPY KNOWN NODES command with the WITH PURGE qualifier.
Note that if the executor or remote node is not defined in the local node database, an error results.
If an error occurs during execution of the LIST EXECUTOR CHARACTERISTICS command, the purge is aborted. After the LIST operation is performed, purging continues even if errors are encountered.
Clearing or purging the local database as part of a copy operation is recommended. If a clear or purge operation is not performed before the remote node data is copied, conflicts can occur between original node entries in the local database and node entries being copied from the remote node database. A node must be identified uniquely, by one name and one address. A conflict exists when the entries being copied on an existing database would cause one node address to be associated with two node names or two node addresses with one node name. When such a conflict occurs during the copy operation, the original node entry is not updated and an informational message is displayed. For example, if the local node database identified node A with address 3.1 and node B with address 3.3, an attempt to copy an entry that defines node A with address 3.3 would fail, and an informational message would be issued.
3.3.5.3. Copying the Node Database from a Remote Node
If you indicate that the volatile node database at the remote node is to be copied (by specifying the USING VOLATILE qualifier in the COPY command), a SHOW KNOWN NODES command is executed at the remote node. If you indicate that the permanent node database is to be copied (by specifying the USING PERMANENT qualifier), a LIST KNOWN NODES command is executed at the remote node.
The COPY operation extracts remote node names and addresses from data returned by the SHOW or LIST command.
- For each node name and address extracted, a SET or DEFINE NODE command is executed on the appropriate local node database. If you indicate in the COPY command that the information is to be copied to the volatile database, the following command is executed for each entry:
SET NODE ADDRESS address NAME name
If you indicate that the information goes to both local node databases, both SET NODE and DEFINE NODE commands are executed for each remote node entry. When the COPY operation receives the name and address of the local node, no SET or DEFINE command is performed.
When the name and address of the remote node from which the data is being copied is returned, the entry indicates that it is the executor node. When the remote node is defined in the local database, however, it is not listed as an executor node. Loop node names listed in the node database at the remote node are not defined in the local database.
After the COPY operation begins defining the remote nodes, it continues trying to define the nodes despite any errors it may encounter. It displays informational messages for errors in individual node entries.
3.3.5.4. Example of Copying Remote Node Data
The following examples illustrate how to use the COPY command to copy remote node entries from the permanent node database at node ROBIN to the permanent node database at node LARK without purging the local node database. In this example, node LARK has not defined the executor node or remote node ROBIN in its database; therefore, error messages are displayed. Note that the copy operation is not performed for nodes A and C, because of a conflict between existing and updated addresses for these nodes. Informational messages display for the entries for nodes A and C. (In the first example, only the node entries resulting from the LIST commands are displayed.)
NCP> LIST KNOWN NODES
Remote node = 2.1 (C)
Remote node = 2.3 (A)NCP> TELL 2.20 LIST KNOWN NODES
Executor node = 2.20 (ROBIN)
Remote node = 2.1 (A)
Remote node = 2.2 (B)
Remote node = 2.3 (C)NCP> COPY KNOWN NODES FROM 2.20 USING PERMANENT %NCP-W-UNRCMP, Unrecognized component, Node %NCP-W-EXEABO, Executor characteristics not defined. %NCP-W-UNRCMP, Unrecognized component, Node %NCP-W-REMABO, Remote node not defined. %NCP-W-INVPVA, Invalid parameter value, Address Remote node = 2.1 (C) NODE 2.1 NAME A %NCP-W-INVPVA, Invalid parameter value, Address Remote node = 2.3 (A) NODE 2.3 NAME C
The error messages generated during the copy operation are displayed on your screen directly under the COPY command. Note that remote node entries successfully copied to the local node database (such as node B) are not displayed under the COPY command. The COPY command ignores these error messages because they do not affect the copy operation.
NCP> LIST KNOWN NODES
Remote node = 2.1 (C)
Remote node = 2.2 (B)
Remote node = 2.3 (A)
Remote node = 2.20 (ROBIN)3.3.5.5. Copying the Permanent Node Database Using DCL COPY
Rather than using the NCP command COPY KNOWN NODES to copy node database information, you can use the DCL COPY command to obtain the contents of an existing permanent node database residing on a remote node in the file SYS$SYSTEM:NETNODE_REMOTE.DAT. You must have the required privileges on the remote node to access this file.
$ COPY BOSTON::SYS$SYSTEM:NETNODE_REMOTE.DAT *
NCP> SET KNOWN NODES ALL
3.3.6. Node Counters
DECnet software automatically collects certain statistics for nodes in the network. These statistics are known as node counters. Such information may include the number of connects sent and received, the number of messages sent and received, and the number of packets lost. This information may be useful either alone or in conjunction with logging information to evaluate the performance of a given node. The network counter summary in the VSI OpenVMS DECnet Network Management Utilities describes the complete list of node counters. Refer to Section 2.7, ''Logging'' for a discussion of logging.
NCP> SET EXECUTOR COUNTER TIMER 600
NCP> SET NODE TRNTO COUNTER TIMER 600
Note that these counters are maintained on the local node. To clear the COUNTER TIMER parameter, use the CLEAR EXECUTOR or CLEAR NODE command along with this parameter.
You can display node counter statistics at any time while the network is running by using the SHOW NODE COUNTERS command.
NCP> ZERO EXECUTOR COUNTERS NCP> ZERO NODE BOSTON COUNTERS NCP> ZERO KNOWN NODES COUNTERS
3.4. Using the DECdns Namespace
If your network has a DECdns namespace running on any DECdns server node, DECnet for OpenVMS can use this namespace for node name and address information. Using the namespace for DECnet for OpenVMS nodes is optional.
3.4.1. Requirements
In order for a DECnet for OpenVMS Phase IV node to use DECdns for nodename-to-address mapping, the network must already have a namespace. This namespace can be set up on one or both of the following nodes:
DNS Version 1 server that is a Phase IV node
DECdns Version 2 server that is either a DECnet/OSI for OpenVMS system or a DECnet/OSI for ULTRIX system
In addition, your node must be configured as a DNS clerk. DECnet for OpenVMS software includes:
DNS Version 1.1 clerk software
The procedure to start it, SYS$STARTUP:DNS$CLERK_STARTUP.COM
The procedure to configure it, SYS$MANAGER:DNS$CHANGE_DEF_FILE.COM
3.4.2. How DECnet for OpenVMS Nodes Use DECdns
The following two examples show how a DECnet for OpenVMS Phase IV node gets node name information when you have enabled the DNS option. During lookups, Session Control first searches the volatile node database on the local
DECnet for OpenVMS node for node names or node addresses and, if the information is not present, the DECdns namespace is then checked.
The following figures show this process. In the first instance, the needed information is stored in the local node database. In the second, this database does not contain the necessary information so Session Control then searches the DECdns namespace.
The requested information is in the volatile node database. The namespace is not accessed.
The requested information is not in the volatile node database.
The request is forwarded to the DECdns name server.
If the DECdns server can provide the requested information, the node places this information in its volatile node database and then makes the connection.
If the DECdns server does not have the information, the DECnet for OpenVMS node returns a status of SS$_NOSUCHNODE or displays the following message:
%SYSTEM-F-NOSUCHNODE, remote node is unknown
3.4.3. Enabling and Disabling the DECdns Namespace Interface
Before DECnet for OpenVMS can use DECdns, you must perform the following
steps:
From the DECdns manager or the network manager, get the following information:
The name of the namespace that your node will use.
The IDP of your network’s network service access point (NSAP). The NSAP is the network’s OSI-compliant global network address.
The node name of a DECdns server, preferably one on your LAN.
Start DECnet.
To configure your node as a DNS clerk execute the following command procedure:
$ @SYS$MANAGER:DNS$CHANGE_DEF_FILE.COM
The procedure asks you the name of the DECdns server node you want to use. Specify the node name with the namespace you want your node to use for node-name-to-address mapping.
Add the DECdns startup procedure to the site-specific startup procedure before STARTNET.COM. The DNS startup procedure is:
SYS$STARTUP:DNS$CLERK_STARTUP.COM
Run the DNS startup procedure.
Ensure that your node is registered in the namespace. See the DECdns manager or the network manager responsible for maintaining the namespace.
Issue the DEFINE EXECUTOR DNS NAMESPACE command to specify the name of the existing DECdns namespace you want to use for node name and address lookups. In addition, issue the DEFINE EXECUTOR IDP command to specify the IDP of the network’s NSAP.
Enable the DNS interface option in the permanent database, thus enabling use of the DECdns namespace when the executor node is started.
NCP> DEFINE EXECUTOR DNS INTERFACE ENABLED
This command specifies that the node will obtain node and address information from the DECdns namespace to update the volatile node database.
To disable use of the namespace, use the SET/DEFINE EXECUTOR DNS INTERFACE DISABLED command. It specifies that the node will not use the DECdns namespace to search for node name and address information. Only the local node database will be searched for this information.
3.5. Circuit Commands
The four classes of circuit that DECnet for OpenVMS supports are DDCMP, CI, Ethernet, and FDDI. The kind of circuit you use depends on your networking needs as well as the kind of hardware you use.
As network manager, use NCP commands to identify all DECnet circuits connected to the local node. Also, specify parameters that affect the operation of the circuits. The following sections describe circuit identification and discuss how to use NCP commands to specify circuit parameters.
3.5.1. Circuit Identification
Like lines, circuits must also have unique identifiers.
3.5.1.1. DDCMP Circuit Identification
dev-cdev-c-udev-c.tdev-c-u.t
|
dev |
Is a device name. |
|
c |
Is a decimal number (0 or a positive integer) that designates the hardware controller for the device. |
|
u |
Is a decimal unit or circuit number (0 or a positive integer) that is included only if there is more than one unit associated with the controller. |
|
t |
Is a decimal number (0 or a positive integer) that identifies a tributary on a multipoint circuit. This is a logical tributary number, not to be confused with the tributary address that is used to poll the tributary. |
Note
Circuit devices that are similar in operation are referred to by the same mnemonic.
DDCMP Point-to-Point Addressing
NCP> SET CIRCUIT DMB-0 STATE ON
NCP> SET CIRCUIT TT-0-0 STATE ON
Dynamic asynchronous DDCMP circuit names are supplied automatically when you establish a dynamic connection. Note that you must load the asynchronous driver NODRIVER before establishing a dynamic connection.
The DECnet for OpenVMS maps network management circuit names to system-specific circuit names (for example, DMB–0 maps to SIA0). Network management circuit names provide network-wide circuit identification independent of individual operating system conventions.
DDCMP Multipoint Tributary Addressing
NCP> SET CIRCUIT DMP-0.1 STATE ON
Use the SET CIRCUIT command to turn on the DMP circuit device as a multipoint tributary device.
NCP> SET CIRCUIT DMP-0.1 TRIBUTARY 5
NCP> SET CIRCUIT DMP-1.0 TRIBUTARY 5
The logical tributary number (0 in this case) is not to be confused with the tributary address. Refer to the description of logical tributary numbers in the circuit identification at the beginning of this section.
3.5.1.2. CI Circuit Identification
NCP> SET CIRCUIT CI-0.1 TRIBUTARY 1
The tributary node address is the CI port number of the remote CI node, not the DECnet node address.
Note that you must load the CNDRIVER before running DECnet over a CI (see Section 2.2.3, ''CI Circuit Devices'').
3.5.1.3. Ethernet and FDDI Circuit Identification
Ethernet and FDDI circuit identification takes the following format:
|
dev |
Is a device name. |
|
c |
Is a decimal number (0 or a positive integer) that designates the hardware controller for the device. |
NCP> SET CIRCUIT SVA-2 ON
The following command identifies the circuit device MFA and the controller number 2 for an FDDI circuit:
NCP> SET CIRCUIT MFA-2 STATE ON
3.5.2. Circuit Parameters
| Type of Circuit | Applicable Circuit Parameter |
|---|---|
| All circuits |
COST cost COUNTER TIMER seconds HELLO TIMER seconds SERVICE { ENABLED | DISABLED } STATE { OFF | ON | SERVICE } |
|
DDCMP circuits |
ACTIVE BASE base ACTIVE INCREMENT increment BABBLE TIMER milliseconds DEAD THRESHOLD count DYING BASE base DYING INCREMENT increment DYING THRESHOLD count INACTIVE BASE base INACTIVE INCREMENT increment INACTIVE THRESHOLD count MAXIMUM BUFFERS count MAXIMUM TRANSMITS count POLLING STATE { ACTIVE | AUTOMATIC | DEAD | DYING | INACTIVE } SERVICE { ENABLED | DISABLED } TRANSMIT TIMER milliseconds TRIBUTARY tributary-address |
|
DDCMP circuits and X.25 DLMcircuits (PVCs or SVCs) |
VERIFICATION { ENABLED | DISABLED | INBOUND } |
|
Ethernet circuits |
MAXIMUM ROUTERS number ROUTER PRIORITY number |
|
X.25 native PVCs |
CHANNEL number DTE dte-address MAXIMUM DATA count MAXIMUM WINDOW count NETWORK network-name TYPE X25 USAGE PERMANENT |
|
X.25 DLM circuits (PVCs or SVCs) |
BLOCKING { ENABLED | DISABLED } CHANNEL number DTE dte-address NETWORK network-name MAXIMUM DATA count MAXIMUM RECALLS count MAXIMUM WINDOW count NUMBER dte-address OWNER EXECUTOR RECALL TIMER seconds TYPE X25 USAGE { INCOMING | OUTGOING | PERMANENT } |
| Parameter Function | Parameter |
|---|---|
| Indicates owner of circuit |
OWNER EXECUTOR |
| Identifies circuit by address |
TRIBUTARY tributary-address |
| Assigns circuit cost for routing purposes |
COST number |
| Sets counter timer for circuit counter event logging |
COUNTER TIMER seconds |
| Sets circuit's operational state |
STATE { OFF | ON | SERVICE } |
| Controls DDCMP multipoint operation |
ACTIVE BASE base DYING BASE base INACTIVE BASE base ACTIVE INCREMENT increment DYING INCREMENT increment INACTIVE INCREMENT increment DEAD THRESHOLD count DYING THRESHOLD count INACTIVE THRESHOLD count BABBLE TIMER milliseconds TRANSMIT TIMER milliseconds MAXIMUM BUFFERS count MAXIMUM TRANSMITS count POLLING STATE { ACTIVE | AUTOMATIC | DEAD | DYING | INACTIVE } TRIBUTARY |
| Sets timer to control Routing layer |
HELLO TIMER seconds |
| Determines whether service operations are allowed for circuit (initiated locally or remotely) |
SERVICE { ENABLED | DISABLED } |
| Controls Routing layer initialization of adjacent node |
VERIFICATION { DISABLED | ENABLED | INBOUND } |
| Limits number of routers permitted on Ethernet circuit |
MAXIMUM ROUTERS number |
| Sets priority of router on Ethernet circuit for selection of designated router |
ROUTER PRIORITY number |
|
Associates logical channel number with X.25 PVC |
CHANNEL number |
|
Specifies the network to which the local DTE belongs |
NETWORK network-name |
|
Associates local DTE with X.25 PVC or SVC |
DTE dte-address |
|
Assigns remote DTE address used to establish an outgoing DLM SVC or to reserve an incoming DLM SVC |
NUMBER dte-address |
|
Defines circuit type; if circuit is not X.25, DDCMP is assumed |
TYPE X25 |
|
Controls data packet parameters for X.25 circuits |
MAXIMUM DATA count MAXIMUM WINDOW count |
|
Determines whether message blocking over DLM circuits occurs |
BLOCKING { DISABLED | ENABLED } |
|
Controls retransmission of DLM outgoing SVCs |
MAXIMUM RECALLS count RECALL TIMER seconds |
Use the SET CIRCUIT command to set and modify the parameters in Table 3.3, ''Circuit Parameters and Their Functions''. Use the CLEAR CIRCUIT command to reset or remove them. The circuit must be in the OFF state before you specify the ALL parameter in the CLEAR CIRCUIT command. Most circuit parameters cannot be modified while the circuit is in the ON state. However, you can modify the COST, COUNTER TIMER, HELLO TIMER, MAXIMUM ROUTERS, STATE, and TRANSMIT TIMER parameters while the circuit is ON.
Note
Not all circuit devices support all parameters listed in Table 3.2, ''Types of Circuit and Applicable Circuit Parameters'' and Table 3.3, ''Circuit Parameters and Their Functions''. If a particular device does not support a parameter, an error message may be displayed.
3.5.2.1. Operational State of the Circuit
|
OFF |
Allows no traffic over a circuit. The circuit is unavailable for network activity. |
|
ON |
Allows traffic over the circuit. This is the normal operational state allowing for complete route-through and downline loading operations. |
|
SERVICE |
Restricts the circuit to service operations only. Only an Ethernet circuit allows logical link activity or route-through at the same time as service operations. Service operations include downline system loading, upline dumping, and loopback testing. |
NCP> SET CIRCUIT SVA-0 STATE ON
DECnet for OpenVMS may automatically change the state of a DDCMP circuit for certain functions. For example, assume that you have set a DDCMP circuit to ON. Later, someone performs a circuit-level loopback test on that circuit without first setting the circuit state to SERVICE. Network management software automatically turns the circuit to the appropriate internal state (or substate) for the test. If the circuit state were displayed at that point, it would register as ON-LOOPING. When the circuit is in this state, it is in use for an active circuit loop test. This test is termed active because it was initiated on the local node. The local node enters the passive loopback state (ON-REFLECTING) whenever a remote node initiates a loopback test with the local node. When the test finishes, the circuit returns to the ON state. For a complete list of circuit states, substates, and their transitions, refer to the VSI OpenVMS DECnet Network Management Utilities.
Several circuit substates have the prefix AUTO. These substates can occur when an adjacent node is or is about to be in an automatic downline loading or triggering stage. For example, if circuit SVA–0 is in the ON state and the local node (BOSTON) receives a request for a downline load on that circuit, the network software on the local node automatically sets the circuit to the ON-AUTOSERVICE state.
NCP> SET CIRCUIT SVA-0 SERVICE ENABLED
To disable service operations on a circuit, set the SERVICE parameter to DISABLED, which allows you to restrict the operation of a circuit for network users. The default for the SERVICE parameter is DISABLED.
3.5.2.2. Circuit Timers
Two timers exist for controlling message transmissions and checking the status of adjacent nodes. The first is a hello timer, which defines the frequency of Routing layer Hello ("I'm still here") messages sent to the adjacent node on the circuit. The second is a listen timer, which controls the maximum amount of time allowed to elapse before the Routing layer stops waiting for either a Hello message or a user message from the adjacent node on the circuit. You cannot set the listen timer with an NCP command; the value of the listen timer is always twice the value of the hello timer at the local node.
NCP> SET CIRCUIT SVA-0 HELLO TIMER 15
This command sets a limit of 15 seconds between Hello messages from the executor node to the adjacent node on circuit SVA–0. The listen interval is 30 seconds between messages from the node on circuit SVA–0 adjacent to the executor node. For the HELLO TIMER parameter, you must specify a value between 1 and 8191 seconds. The default value for the HELLO TIMER parameter is 15 seconds.
The value of the HELLO TIMER parameter should be the same on all adjacent nodes over the same circuit.
Digital recommends that you accept the default value for the HELLO TIMER parameter.
3.5.3. DDCMP Circuit Parameters
On systems that support DDCMP, some DDCMP circuit parameters relate to verification and control of tributaries.
3.5.3.1. DDCMP Circuit Level Verification
The VERIFICATION parameter applies to DDCMP circuits.
The VERIFICATION parameter controls whether the local node checks the Routing layer passwords (RECEIVE PASSWORD and TRANSMIT PASSWORD) in the database entry for the remote node before it completes a node initialization request from that node.
NCP> SET CIRCUIT DMB-0 VERIFICATION ENABLED
NCP> SET CIRCUIT DMB-0 VERIFICATION DISABLED
The default is DISABLED, which means that you need not specify a node in the configuration database to complete Routing layer initialization. To include a remote node in the configuration database, you must specify the NODE NAME and ADDRESS parameters; you can optionally specify the RECEIVE PASSWORD and TRANSMIT PASSWORD parameters.
Nodes not defined in the remote node database at the local node cannot initialize over a circuit that has verification enabled.
Nodes defined in the remote node database for which receive and transmit passwords are not specified are allowed to initialize whether or not verification is enabled on the circuit.
Nodes defined in the remote node database for which receive and transmit passwords are specified are allowed to initialize over a circuit with verification enabled, provided the receive password in the local database matches the transmit password sent by the remote node.
Any node is allowed to initialize over a circuit for which verification is disabled.
The VERIFICATION INBOUND parameter applies to any DDCMP point-to-point circuit. When you specify VERIFICATION INBOUND, the remote node submitting an initialization request to the local node must supply a transmit password that matches the receive password for that node in the local node database. The local node, however, does not send its initialization password to the requesting node. The VERIFICATION INBOUND parameter provides added security for the local node, which can verify the password of a node requesting a connection without revealing its own password.
NCP> SET CIRCUIT DMB-0 VERIFICATION INBOUND
The VERIFICATION INBOUND parameter is supplied automatically for a dynamic asynchronous DDCMP circuit. When a dialup node requests a dynamic connection to the local node and the VERIFICATION INBOUND parameter is set for the circuit, you must specify the INBOUND parameter for the dialup node in the node database. If you do not specify VERIFICATION INBOUND, the INBOUND parameter in the dialup node entry is ignored.
3.5.3.2. DDCMP Tributary Control
Several circuit parameters enable you to regulate and control tributaries. Some of these parameters apply to polling, others to timers. Note that you specify these circuit parameters on the control station, not on the tributary itself.
Polling Over DDCMP Circuits
NCP> SET CIRCUIT DMP-0.3 DYING THRESHOLD 5
NCP> SET CIRCUIT DMP-0.1 INACTIVE THRESHOLD 12
The control station attempts to poll its active tributary 12 times. If it receives only acknowledgments, but no data responses, the control station changes the active tributary's polling state to INACTIVE. The values for the INACTIVE THRESHOLD parameter range from 0 to 255 and the default is 8.
NCP> SET CIRCUIT DMP-0.1 POLLING STATE DEAD
NCP> SET CIRCUIT DMP-1.2 ACTIVE BASE 225
After a poll, this command resets the base priority of the tributary on circuit DMP–1.2 to 225. The values for all BASE parameters range from 0 to 255. The defaults are ACTIVE, 255; INACTIVE, 0; and DYING, 0.
NCP> SET CIRCUIT DMP-2.2 INACTIVE INCREMENT 200
This command adds 200 to the base priority of the tributary on circuit DMP–2.2. The increment values range from 0 to 255. The defaults are ACTIVE, 0; INACTIVE, 64; and DYING, 16. Note that, if you set a 0 increment on a tributary with a base priority lower than 128, the tributary will never be polled. Active tributaries usually have a high base priority and, therefore, do not need a high increment value.
NCP>SET CIRCUIT DMP-0.2 MAXIMUM BUFFERS 10
NCP> SET CIRCUIT DMP-0.1 MAXIMUM TRANSMITS 2
DDCMP Tributary Circuit Timers
NCP> SET CIRCUIT DMP-0.1 BABBLE TIMER 8000 NCP> SET CIRCUIT DMP-0.1 TRANSMIT TIMER 4000
The first command limits transmission time to 8 seconds (8000 milliseconds) for the circuit's tributary. Values for the BABBLE TIMER parameter range from 1 to 65,535; the default is 6000 (6 seconds).
The second command sets a delay of 4 seconds (4000 milliseconds) between each transmission from the tributary. Values for the TRANSMIT TIMER parameter range from 0 to 65,535; the default is 0.
3.5.4. Ethernet and FDDI Circuit Parameters
Broadcast circuits have the following parameters in common with other DECnet for OpenVMS circuits: HELLO TIMER, COST, COUNTER TIMER and STATE. Parameters unique to broadcast circuits are ROUTER PRIORITY and MAXIMUM ROUTERS. The circuit must be in the OFF state to modify the ROUTER PRIORITY parameter.
If there are two or more routers on the same broadcast circuit, one is elected the designated router. The designated router provides message routing services for end nodes on the broadcast media (see Section 2.4.5.1, ''Ethernet Designated Routers''). A designated router is selected even if there are currently no end nodes on the broadcast media. Routers are not required to send messages over the broadcast media; end nodes on the broadcast circuit are capable of communicating directly. However, routers are required to route messages from nodes on the LAN to nodes elsewhere in the network via other circuits.
NCP> SET CIRCUIT SVA-0 ROUTER PRIORITY 70
This command assigns a router priority of 70 to the local node on circuit SVA-0.
Each routing node on an Ethernet circuit or FDDI is assigned a router priority value in the range 0 through 127; the default value is 64. DECnet software compares the router priority values of the nodes and elects the router with the highest priority the designated router.
If two or more routing nodes on the Ethernet have the same highest router priority value, the node with the highest node address is selected as designated router. To learn which router is the designated router, enter a SHOW ACTIVE CIRCUITS CHARACTERISTICS command. The following information is displayed for the circuit:
Designated router = 1.224 (ROBIN) Router priority = 70
The recommended limit on the number of routers on a broadcast circuit is 10, because of the control traffic overhead (composed of routing messages and hello messages) involved. The maximum number of routers allowed is 33.
NCP> SET CIRCUIT SVA-0 MAXIMUM ROUTERS 4
The default value is 33.
3.5.5. Ethernet Configurator Module Commands
Use the Ethernet configurator module to obtain a list of all systems on an Ethernet circuit or circuits. Approximately once every 10 minutes, each node on an Ethernet circuit that conforms to the DNA specifications transmits a system identification message to a multicast address that the configurator monitors. The configurator uses these messages to build the configuration list.
Use NCP commands to access and control the configurator module. When you request information about the current configuration of nodes on Ethernet circuits, the following is displayed for each system: its Ethernet physical and hardware addresses, the type of device connecting it to the circuit, maintenance functions it can perform, and the time of the last system identification message from the system.
The Ethernet configurator module requires a default nonprivileged DECnet account or an account associated with the $NICONFIG object. The configurator runs as a separate process and, once it is started, becomes available to all users on the system. The configurator module continues to execute and maintains and updates its database of information on active nodes.
For a random distribution of nodes with possible loss of system identification datagrams, the configurator would require 40 minutes to collect all node addresses. In practice, the configurator normally requires about 12 minutes to complete a list.
To determine whether the configurator module is running, enter the following command:
NCP>SHOW MODULE CONFIGURATOR KNOWN CIRCUITS
3.5.5.1. Enabling Surveillance by the Ethernet Configurator
To create or modify Ethernet configurator module parameters in the volatile database, use the SET MODULE CONFIGURATOR command. The SURVEILLANCE ENABLED parameter in this command causes the configurator module to begin listening to system identification messages transmitted by all systems on the circuit or circuits specified in the command. The configurator collects this information and constructs a list of systems and their capabilities in the volatile database.
3.5.5.2. Obtaining a List of Systems on Ethernet Circuits
The Ethernet physical and hardware addresses of the system
The device connecting the system to the Ethernet
The maintenance version number of the system
A list of maintenance functions that the node can perform
The last time a system identification message was received from that system
NCP> SHOW MODULE CONFIGURATOR CIRCUIT UNA-0 STATUS
Module Configurator Volatile Status as of 30-DEC-2020 09:15:25 Circuit name = SVA-0 Surveillance flag = enabled Elapsed time = 00:32:43 Physical address = AA-00-04-00-A3-04 Time of last report = 30-DEC 9:14:8 Maintenance version = V3.0.0 Function list = Loop, Primary loader Hardware address = AA-00-03-00-00-07 Device type = SVA Circuit name = SVA-0 Surveillance flag = enabled Elapsed time = 0:32:43 Physical address = AA-00-04-00-A1-04 Time of last report = 30-DEC 9:11:29 Maintenance version = V3.0.0 Function list = Loop, Primary loader Hardware address = AA-00-03-00-00-57 Device type = SVA
3.5.5.3. Disabling Surveillance by the Ethernet Configurator
NCP>SET MODULE CONFIGURATOR KNOWN CIRCUITS - _ SURVEILLANCE DISABLED
After the configurator ceases surveillance of all Ethernet circuits it has been monitoring, the list of system information is deleted.
3.5.6. Circuit Counters
DECnet for OpenVMS automatically maintains certain statistics for circuits in the network. These statistics are known as circuit counters. For all circuits, counter information may include the number of data packets sent, received, and lost over the circuit; timeouts; and the amount of time since the counters were last zeroed.
DECnet includes additional counter information for systems that have specific kinds of circuits.
For systems with DDCMP circuits, counters are maintained for timeouts and data and buffer errors. For DDCMP, FDDI and Ethernet circuits, counters include the number of bytes and data blocks sent and received.
Information obtained from counters may be useful either alone or in conjunction with logging information to measure the performance and throughput for a given circuit. See the VSI OpenVMS DECnet Network Management Utilities for a complete list of circuit counters.
You can use NCP to regulate the frequency with which circuit counters are logged and when they are zeroed. At any point while the network is running, you can also display circuit counter statistics using the SHOW CIRCUIT COUNTERS command.
NCP> SET CIRCUIT SVA-0 COUNTER TIMER 600
NCP> CLEAR CIRCUIT SVA-0 COUNTER TIMER
NCP> ZERO CIRCUIT SVA-0 COUNTERS NCP> ZERO KNOWN CIRCUITS COUNTERS
3.6. Line Commands
DECnet for OpenVMS supports four classes of line: DDCMP, CI, FDDI, and Ethernet. The kind of line you use depends on your hardware and the kind of configuration you have.
Use NCP commands to identify all physical lines connected to the local node and to specify parameters that affect operation of the lines. The following sections describe line identification and discuss the line parameters you can use.
3.6.1. Line Identification
dev-cdev-c[-u]
|
dev |
Is the device name. |
|
c | Is the decimal number (0 or a positive integer) designating the device’s hardware controller. |
|
u | Is the decimal unit or line number (0 or a positive integer) included if the device is a multiple unit line controller. For all non-multiplexed lines, the unit number is optional and, if specified, is always zero (0). |
Note
Devices that are similar in operation are referred to by the same mnemonic.
DECnet maps network management line names to system-specific line names (for example, SVA-0 maps to ESA0:). Network management line names provide network-wide line identification independent of individual operating system conventions.
Commands in this section illustrate line identification.
NCP> SET LINE SVA-0 STATE ON
NCP>SET LINE DMB-0 STATE ON
The following command specifies an asynchronous DDCMP point-to-point line. It identifies the DMB asynchronous line unit by the mnemonic TX and specifies controller number 0 and unit number 0 (that is, TXA0).
NCP>SET LINE TX-0-0 RECEIVE BUFFERS 4 STATE ON
When you turn on an asynchronous line, you are advised to set the number of receive buffers to a value of 4 or more (see Section 3.6.3.1, ''Line Buffers'').
Dynamic asynchronous DDCMP line names are supplied automatically when a dynamic connection is established.
NCP> SET LINE CI-0 STATE ON
3.6.1.1. Line Protocols
|
DDCMP CONTROL |
Specifies the line as a multipoint control station. You can set multiple circuits for CONTROL lines. Each circuit must have a unique physical tributary address. |
|
DDCMP DMC |
Specifies that the line is in DMC emulator mode. DMC is similar to DDCMP POINT protocol, except that DMC uses an older version of DDCMP (Version 3.2). This protocol should be set for the local line when the remote line is a DMC. |
|
DDCMP POINT |
Specifies the line as one end of a point-to-point DDCMP connection. You may specify only one circuit per POINT line. |
|
DDCMP TRIBUTARY |
Specifies that the line is a multipoint tributary end of a DDCMP multipoint group. You may specify only one circuit per TRIBUTARY line. |
|
ETHERNET | Specifies that the line uses the Ethernet protocol. |
| FDDI | Specifies that the line uses the FDDI protocol. |
If you do not specify a line protocol, the default values apply, according to the device specified. See Chapter 2, "DECnet for OpenVMS Components and Concepts" for device lists.
You do not specify any protocol for a CI line. The CI uses its own private protocols for communication between nodes.
The SET LINE PROTOCOL examples that follow specify line protocols in the configuration database at the local node and on remote nodes other than DECnet for OpenVMS, such as DECnet-RSX. For example, the following command identifies line DMP-0 as a multipoint control station:
NCP>SET LINE DMP-0 PROTOCOL DDCMP CONTROL
You set this parameter in the database of the local node at the controlling end of this line. You could specify a tributary for this line, as follows:
NCP>SET LINE DMP-1 PROTOCOL DDCMP TRIBUTARY
You set this parameter in the database of the remote node connected to the tributary end of the control station for that line.
3.6.2. Line Parameters
|
Type of Line |
Applicable Line Parameter |
|---|---|
|
All lines |
CONTROLLER controller-mode COUNTER TIMER seconds STATE { ON | OFF } |
|
All lines except CI |
PROTOCOL protocol-name |
|
All lines except X.25 lines |
BUFFER SIZE number |
|
All lines except Ethernet lines |
RETRANSMIT TIMER millisecond |
|
DDCMP lines |
CLOCK { EXTERNAL | INTERNAL } DEAD TIMER milliseconds DELAY TIMER milliseconds DUPLEX duplex-mode RECEIVE BUFFERS count SCHEDULING TIMER milliseconds SERVICE TIMER milliseconds STREAM TIMER milliseconds |
|
DMR11 lines |
TRANSMIT PIPELINE count |
|
Asynchronous DDCMP lines |
HANGUP { DISABLED | ENABLED } LINE SPEED number SWITCH option |
|
X.25 lines |
HOLDBACK TIMER milliseconds INTERFACE { DCE | DTE } MAXIMUM BLOCK count MAXIMUM RETRANSMITS count MAXIMUM WINDOW count MICROCODE DUMP file-spec NETWORK network-name PROTOCOL { LAPB | LAPBE } STATE SERVICE |
| Parameter Function | Parameter |
|---|---|
| Defines line protocol |
PROTOCOL { DDCMP CONTROL | DDCMP POINT | DDCMP DMC | DDCMP TRIBUTARY | ETHERNET | LAPB | LAPBE } |
| Sets counter timer for line counter event logging |
COUNTER TIMER seconds |
| Selects clock type |
CLOCK { INTERNAL | EXTERNAL } |
| Sets line's operational state |
STATE { OFF | ON | SERVICE } |
| Sets maximum receive buffer size for logical links over specific line |
BUFFER SIZE number |
| Sets number of buffers in receive queue |
RECEIVE BUFFERS number |
| Establishes physical line control parameters for DDCMP protocol |
DUPLEX { FULL | HALF } DEAD TIMER milliseconds DELAY TIMER milliseconds RETRANSMIT TIMER milliseconds SCHEDULING TIMER milliseconds SERVICE TIMER milliseconds STREAM TIMER milliseconds |
| Specifies asynchronous DDCMP line characteristics |
HANGUP { DISABLED | ENABLED } LINE SPEED number SWITCH { DISABLED | ENABLED } |
| Establishes line-level loopback control for controller operation |
CONTROLLER { LOOPBACK | NORMAL } |
| Establishes frame control parameters for X.25 line |
MAXIMUM BLOCK count MAXIMUM WINDOW count |
| Controls retransmission of frames for X.25 line |
MAXIMUM RETRANSMITS count RETRANSMIT TIMER |
| Controls acknowledgment of frames for X.25 line |
HOLDBACK TIMER milliseconds |
| Controls packet transmission over satellite link |
TRANSMIT PIPELINE count |
| Defines the way in which the line is used |
INTERFACE { DTE | DCE } |
Use the SET LINE command to establish and modify the parameters in Table 3.5, ''Types of Line and Applicable Line Parameters'' and Table 3.6, ''Line Parameters and Their Functions''. You must set the line to OFF if you want to modify any parameters except COUNTER TIMER, SERVICE, SERVICE TIMER, and STATE.
STATE is a required parameter for all lines that you specify in the configuration database.
Use the CLEAR LINE command to reset or remove parameters. The line must be set to the off state before you specify the ALL parameter in the CLEAR LINE command.
Note that not all circuit devices support all parameters listed in Table 3.5, ''Types of Line and Applicable Line Parameters'' and Table 3.6, ''Line Parameters and Their Functions''. If a particular device does not support a parameter, an error message may be displayed.
3.6.2.1. Operational State of Lines
|
OFF |
Allows no traffic over a line. The line is unavailable for network activity. |
|
ON |
Allows traffic over the line. The ON state is the normal operational state, which allows complete route-through and downline loading operations. |
The ON and SERVICE states have substates; see the VSI OpenVMS DECnet Network Management Utilities for a complete list of line states, substates, and their transitions.
NCP> SET LINE DMC-0 STATE ON
The STATE parameter is optional and, by default, is set to OFF.
3.6.2.2. Buffer Size
You can increase the maximum size of receive buffers (and therefore the size of NSP messages) that can be transmitted over a particular line by specifying the BUFFER SIZE parameter in the SET LINE command. For certain logical links established over the line to adjacent nodes, this BUFFER SIZE value overrides the executor node BUFFER SIZE limit specified in the SET EXECUTOR command (see Section 3.3.4.1, ''Logical Link Control'').
If you specify the BUFFER SIZE parameter for a line, the adjacent node on any new logical link initiated over that line can optionally accept an NSP message segment size that is based on the BUFFER SIZE value. If the remote node accepts the segment size, the logical link to that node is then tied to that circuit. If the circuit fails, the logical link does not automatically route the packet through an alternate circuit; that is, the logical link becomes non adaptive.
NCP> SET LINE SVA-0 BUFFER SIZE 1400
If the adjacent node does not accept a segment size based on the BUFFER SIZE value, the default is the executor node’s BUFFER SIZE value. The maximum and default line buffer size for an Ethernet or FDDI line is 1498 bytes. A large value for BUFFER SIZE will achieve maximum performance because all logical links between adjacent nodes will use this message size.
This feature can also be used to maximize performance over the CI. However, on a CI the BUFFER SIZE parameter must be less than or equal to the SYSGEN parameter SCSMAXDG. Failure to do this will result in an unusable CI circuit.
Increasing line BUFFER SIZE may require that additional buffered I/O byte count quota (BYTLM) be allocated to the NETACP process. See Section 5.4.3, ''CPU Time Requirements'' for information about adjusting NETACP’s BYTLM quota.
3.6.3. DDCMP Line Parameters
On systems that support DDCMP, several parameters regulate various aspects of a DDCMP line’s physical protocol operation. You can specify the number of receive buffers, the duplex mode, and the timers for both normal and service operations.
Parameters that apply specifically to asynchronous DDCMP lines indicate the speed of the line, whether modem signals are dropped when a line is shut down, and whether an asynchronous line is switched back to a terminal line when disconnected from the network. For a dynamic asynchronous line, DYNSWITCH supplies these parameters to NETACP automatically.
The following sections describe the DDCMP line parameters.
3.6.3.1. Line Buffers
NCP> SET LINE TT-0-0 RECEIVE BUFFERS 4
Values for this parameter range from 1 to 32. The number of buffers you set depends on throughput requirements and available memory pool. A value in the range of 2 to 4 is adequate for line speeds of less than 56K bits. For asynchronous lines, a value of at least 4 is recommended. Megabit line speeds may require eight or more buffers, depending on the observed errors.
$ RUN SYS$SYSTEM:NCP NCP> SHOW CIRCUIT TT-0-0 COUNTERS
NCP> SHOW LINE TT-0-0 CHARACTERISTICS
\Line Volatile Characteristics as of 30-DEC-2020 9:32:50 Line = TT-0-0 Receive Buffers = 4 Controller = normal Duplex = full Protocol = DDCMP point Retransmit timer = 3000 Line speed = 9600 Switch = disabled Hangup = disabled
NCP> SET LINE TT-0-0 STATE OFF NCP> SET LINE TT-0-0 RECEIVE BUFFERS 6 NCP> SET LINE TT-0-0 STATE ON
To change the number of receive buffers in the permanent database as well, use the NCP command DEFINE LINE. Increasing the number of line RECEIVE BUFFERS may require that additional buffered I/O byte count quota (BYTLM) be allocated to the NETACP process. Refer to Section 5.4.3, ''CPU Time Requirements'' for information about adjusting NETACP’s BYTLM quota.
3.6.3.2. Duplex Mode
NCP> SET LINE DMC-1 DUPLEX FULL
Generally, you use full-duplex mode for local lines and permanently wired telephone lines; you usually use half-duplex mode for dialup remote telephone lines used with half-duplex synchronous modems. If you use a modem, consult the manufacturer's documentation for full- or half-duplex characteristics.
3.6.3.3. Line Timers
Service timer – sets the maximum amount of time allowed to elapse before a retransmission is necessary when service operations are under way.
Retransmit timer – sets the maximum amount of time allowed to elapse before a retransmission is necessary on a multipoint line. This is the amount of time a control station will wait for a tributary to respond. For a DMF32 tributary, it is the maximum amount of time the tributary will hold the line before returning control to the control station.
Dead timer – sets the amount of time between polls of the dead tributaries.
Delay timer – sets the amount of time to delay between polls of active tributaries.
Scheduling timer – sets the time limit between recalculations of tributary polling priorities.
Stream timer – sets the amount of time that a tributary or half-duplex remote station is allowed to hold the line.
The DMP11 automatically handles message retransmission for normal operations. However, when a DDCMP circuit is in the SERVICE state, a line retransmission timer is necessary because the DMP11 does not handle retransmission in maintenance operation protocol (MOP) mode.
RETRANSMIT TIMER = (20000 * buffer-size * number-of-buffers)/bps-of-line
In general, use this formula to calculate the best value for the retransmit timer (in milliseconds).
The number of buffers is the value specified for the MAXIMUM TRANSMITS parameter in the SET CIRCUIT command; it represents the maximum number of data messages that the tributary can transmit in a single poll interval (see Section 3.5.3.2, ''DDCMP Tributary Control'').
RETRANSMIT TIMER = (20000 * 576 * 4)/56000 = 820 milliseconds
NCP> SET LINE DMP-2 RETRANSMIT TIMER 820
This command sets the retransmission frequency for line DMP–2 to 820 milliseconds. If a message is not acknowledged in 820 milliseconds, it is retransmitted.
The preceding formula does not apply to the DMF32 tributary mode. The value of the retransmit timer is the maximum time the tributary will hold the line before returning control to the control station. For DMF32 tributary mode, therefore, the more active the tributary, the higher the value to which you should set the retransmit timer (a value of 2000 is recommended). For inactive tributaries, set the timer value lower (a value of 500 milliseconds is recommended).
3.6.3.4. Satellite Transmission Control
NCP> SET LINE DMC-2 ... TRAMSMIT PIPELINE 10
The TRANSMIT PIPELINE parameter is optional and, by default, takes the value 7.
messages = (delay*rate)/(size*8)
| delay | Is the link's round trip delay time in seconds, which is the total time required for a message to reach the remote receiver and for the acknowledgment to be received by the transmitter. You can determine the delay value from information supplied by the carrier providing the leased circuit, or by observing the delay on suitable line-monitoring equipment. |
| rate | Is the line speed in bits per second. |
| size | Is the average DDCMP message size in bytes, which can be calculated by dividing the number of bytes transmitted by the number of messages transmitted. Use the SHOW LINE command with the COUNTERS parameter to determine the number of bytes and messages transmitted. Line counters are described in Section 3.6.6, ''Line Counters''. |
0.67*9600 /(40*8) = 20
For this example, the optimum value for TRANSMIT PIPELINE is 20 messages.
3.6.3.5. Asynchronous DDCMP Line Parameters
The LINE SPEED, HANGUP, and SWITCH parameters apply only to asynchronous DDCMP lines. Values for these parameters are provided automatically when a line is switched dynamically from a terminal line to an asynchronous DDCMP line. When you initiate a dynamic connection between two nodes over a telephone line, these parameters are included in the line entries supplied to the line database. For static asynchronous DDCMP lines, these parameters usually assume their default values.
The LINE SPEED parameter specifies in baud the speed of an asynchronous DDCMP line. The parameter defaults to the current speed of the line. If two asynchronous lines are connected, both lines must have the same line speed.
If a dynamic connection is made, this value is supplied automatically for each line. For a static asynchronous line, the default line speed value is the value of the /SPEED qualifier in the DCL command SET TERMINAL you specified to cause the terminal line to be converted to an asynchronous line.
The HANGUP parameter determines whether the modem signal is dropped when the line is shut down. When you shut down a dynamically switched asynchronous line, the modem carrier is dropped if the value of the parameter is ENABLED. This value, supplied automatically, corresponds to the /HANGUP qualifier in the SET TERMINAL command you specified to cause the terminal line to be switched to an asynchronous line. If the value supplied for the parameter is DISABLED, the modem signal is not dropped when the line is shut down. For a static asynchronous line, the parameter defaults to ENABLED.
The SWITCH parameter indicates whether an asynchronous DDCMP line is to be switched back to a terminal line after it is disconnected from the network (when the channel to the network is deassigned). The SWITCH parameter is enabled automatically for a dynamic asynchronous line so that the line can be switched back to a terminal line when the dynamic connection is broken. The parameter defaults to DISABLED for a static asynchronous line, which remains available as a communications line even when not assigned a channel to the network. Generally, you do not need to set the SWITCH parameter manually.
3.6.4. Ethernet Line Parameters
Parameters the Ethernet lines have in common with other DECnet lines are COUNTER TIMER, PROTOCOL, STATE, RECEIVE BUFFERS and BUFFER SIZE.
When you enter the SHOW LINE command, the Ethernet address associated with the Ethernet line device controller is displayed as a read-only parameter, HARDWARE ADDRESS. For example:
NCP>SHOW LINE SVA-0 CHARACTERISTICS
This command results in the following information being displayed for SVA-0:
Line = SVA-0 Receive buffers = 10 Controller = normal Protocol = Ethernet Service timer = 4000 Hardware address = 08-00-2B-23-AF-F3 Device buffer size = 1498
See the discussion of physical and hardware addresses in Section 2.1.2, ''Hardware Addresses and Physical Addresses''.
3.6.5. FDDI Line Parameters
Parameters the FDDI lines have in common with other DECnet lines are BUFFER SIZE, CONTROLLER, HARDWARE ADDRESS, PROTOCOL, STATE, RECEIVE BUFFERS and SERVICE TIMER.
You can use the BUFFER SIZE parameter to optimize performance over a high-speed link such as FDDI. (See Section 3.6.2.2, ''Buffer Size''.)
3.6.5.1. Displaying the Hardware Address
The FDDI address associated with the FDDI line device hardware is displayed as a read-only parameter, hardware address, in response to the SHOW LINE command.
NCP>SHOW LINE MFA-0 CHARACTERISTICS Line = MFA-0 Receive buffers = 10 Controller = normal Protocol = FDDI Service timer = 4000 Hardware address = 08-00-2B-1C-12-16 Device buffer size = 1498 Requested TRT = 0 Valid transmission time = 32768 Restricted token timeout = 0 Ring purger enable = off NIF target = 00-00-00-00-00-00 SIF configuration target = 00-00-00-00-00-00 SIF operation target = 00-00-00-00-00-00 Echo target = 00-00-00-00-00-00 Echo data = 00 Echo length = 0
See the discussion of physical and hardware addresses in Section 3.6.2.2, ''Buffer Size''.
3.6.5.2. Displaying the Line Status
To display the FDDI line status enter the following command:
NCP>SHOW LINE MFA-0 STATUS
The command results in the following information display:
Line = MFA-0 State = on Negotiated TRT = 99840 Duplicate address flag = unknown Upstream neighbor = 08-00-2B-1C-0D-BB Old upstream neighbor = 00-00-00-00-00-00 Upstream neighbor DA flag = unknown Downstream neighbor = 00-00-00-00-00-00 Old downstream neighbor = 00-00-00-00-00-00 Ring purger state = off Ring error reason = no error Neighbor PHY type = A Link error estimate = 15 Reject reason = none
Table 3.7, ''FDDI Line Status Parameters and Their Functions'' lists all FDDI line status read-only parameters and their functions.
| Parameter | Function |
|---|---|
|
Negotiated TRT |
Negotiated value of the token rotation timer |
|
Duplicate address flag |
The summary output from the duplicate address test algorithm |
|
Upstream neighbor |
Data link address of upstream neighbor MAC |
|
Old upstream neighbor |
The previous non-null value of upstream neighbor, or the null address if upstream neighbor has always been null |
|
Upstream neighbor DA flag |
The upstream neighbor’s duplicate address status as reported by the NIF frame. Only meaningful if upstream neghbor is not null |
|
Downstream neighbor |
Data link address of downstream neighbor MAC |
|
Old downstream neighbor |
The previous non-null value of downstream neighbor, or the null address if downstream neighbor has always been null |
|
Ring purger state |
The state of the ring purger function |
|
Ring error reason |
The reason code for the most recent link error, or "no error" if no link error has ever occurred |
|
Neighbor PHY state |
The PHY type of the neighbor PHY or "unknown" if there is no connection yet |
|
Link error estimate |
The link error monitor current estimate of the link error rate |
|
Reject reason |
The reason why the PHY port is in the REJECTED state |
3.6.6. Line Counters
DECnet software automatically maintains statistics for certain lines in the network. These statistics are known as line counters.
Counter information varies, depending on the kind of lines installed on your system. It includes information about the number of bytes and data blocks sent and received; local and remote process errors; and the amount of time since the counters were last zeroed.
Line counters for Ethernet and FDDI lines include the number of bytes, multicast bytes, data blocks, and multicast blocks sent and received; and the number of send failures and discarded frames. Line counters for FDDI lines also include counters for ring-specific information. Line counters for Ethernet include the number of blocks deferred or sent after collision.
Counters enable you to measure the performance and throughput for a given line. Counter information can be useful alone, and in conjunction with logging information. Refer to Section 2.7, ''Logging'' for a discussion of logging.
You can use NCP to affect the frequency with which counters are logged and when the counters are zeroed. At any point while the network is running, you can also display line counter statistics using the SHOW LINE COUNTERS command.
NCP> SET LINE SVA-0 COUNTER TIMER 600
NCP> CLEAR LINE SVA-0 COUNTER TIMER
NCP> ZERO LINE SVA-0 COUNTERS NCP> ZERO KNOWN LINES COUNTER
Refer to VSI OpenVMS DECnet Network Management Utilities for more detailed information on line counters.
3.7. Routing Commands
As network or system manager, you can use certain NCP commands to specify how the network is to be configured into routing and nonrouting nodes. Not all hardware platforms support routing. Check the DECnet for OpenVMS Software Product Description to determine if routing is supported by software running on your hardware platform.
During configuration, you can use NCP parameters to indirectly control the path data takes through the network, and to control the timing of routing messages; these parameters have reasonable default values for most networks.
3.7.1. Specifying the Node Type
You specify the type of node in the TYPE parameter of the DEFINE EXECUTOR command. For DECnet Phase IV, DECnet for OpenVMS supports three values for the node type:
| Node Type | TYPE Parameter |
| Phase IV end | NONROUTING IV |
| Phase IV level 1 | ROUTING IV |
| ?Phase IV level 2 | AREA |
To designate the executor as a Phase IV nonrouting node (end node), enter the following command:
NCP> DEFINE EXECUTOR TYPE NONROUTING IV
To specify the executor as a router, enter the following command:
NCP> DEFINE EXECUTOR TYPE AREA
This command creates a level 2 router in an area network configuration.
You cannot change the executor node type while DECnet is running. Shut down the network, use the DEFINE command to change the executor node type, and then restart the network.
The SHOW EXECUTOR CHARACTERISTICS command displays the node type of the executor node. The SHOW NODE node-id STATUS command displays the node type of a specified adjacent node. The possible values for the node type are AREA, ROUTING IV, NONROUTING IV, ROUTING III, NONROUTING III, or PHASE II. A Phase IV node can be a level 2 router (AREA), a level 1 router (ROUTING IV), or an end node (NONROUTING IV). A Phase III node can be either a router (ROUTING III) or an end node (NONROUTING III).
3.7.2. Specifying the Area Number in a Node Address
area-number.node-number
For example, node 300 in area 40 has a node address of 40.300.
NCP> SET EXECUTOR ADDRESS 40.300
Configuration of a network requires that each node is assigned a node address containing an appropriate area number. If you do not specify an area number in a node address, the executor area number is used.
area-number * 1024 + node-number
You can also convert the address to its hexadecimal equivalent in order to determine the physical address of the node (see Section 2.1.2, ''Hardware Addresses and Physical Addresses'').
Referring to a node by name is generally more convenient.
3.7.3. Setting Routing Configuration Limits
On systems that support routing, you can establish certain limits related to routing over the network during network configuration. You can limit the number of routers allowed on a single LAN and the number of routing and end nodes permitted on all broadcast circuits to which the local node is attached. If the network is grouped into areas, you can limit the number of areas allowed.
3.7.3.1. Maximum Number of Ethernet Routers and End Nodes Allowed
Certain NCP command parameter values limit the number of routers and end nodes that can be configured on broadcast circuits.
NCP> SET CIRCUIT SVA-0 MAXIMUM ROUTERS 5
Use the SET EXECUTOR command with the MAXIMUM BROADCAST ROUTERS parameter to specify the maximum number of routing nodes that will be permitted on all Ethernet and FDDI circuits to which the local node is attached.
NCP> SET EXECUTOR MAXIMUM BROADCAST ROUTERS 12
The default value of this parameter is 32.
NCP> SET EXECUTOR MAXIMUM BROADCAST NONROUTERS 20
The default value is 64.
3.7.3.2. Maximum Number of Areas Allowed
NCP> SET EXECUTOR MAXIMUM AREA 50
If you do not specify this parameter, the Routing layer recognizes up to 63 areas.
3.7.4. Routing Control Parameters
On systems that support routing, NCP supports routing parameters that provide for circuit cost control, of the total path between any two nodes (MAXIMUM COST, MAXIMUM HOPS), route-through control (MAXIMUM VISITS), and equal cost path splitting (MAXIMUM PATH SPLITS and PATH SPLIT POLICY).
For a network divided into areas, the area routing parameters for maximum cost and length of the paths between areas in the network (AREA MAXIMUM COST, AREA MAXIMUM HOPS) also apply. These parameters are used to control the path that data is likely to take when being transmitted through the network, and to minimize congestion at particular nodes in the network. For most networks, the default values for these parameters should be acceptable.
3.7.4.1. Circuit Cost Control Parameter
Figure 3.2, ''Network Circuit Costs'' illustrates sample circuit costs attributed to the network example. The following paragraphs discuss routing control parameters as they relate to Figure 3.2, ''Network Circuit Costs''.
NCP> SET CIRCUIT SVA-2 COST 4
Numbers in the range of 1 to 25 are valid circuit costs. The default value is 10.
Establishing a circuit cost standard that is uniform across the entire network is recommended.
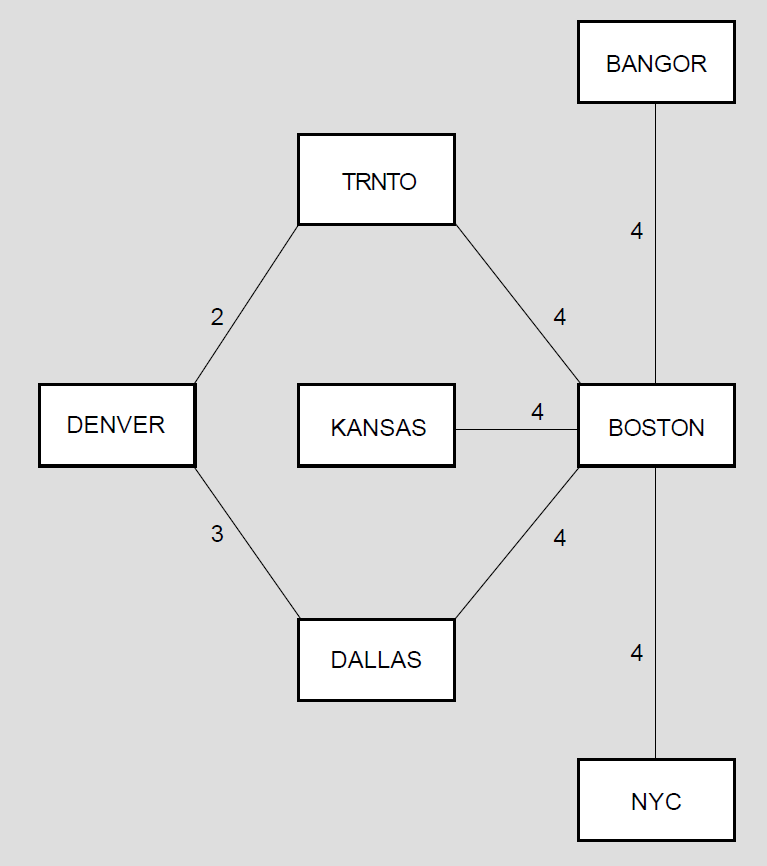
3.7.4.2. Maximum Path Control Parameters
You set both the maximum cost for all circuits to the destination node (MAXIMUM COST) and the maximum hops that a packet can make when routed to the destination node (MAXIMUM HOPS) using the SET EXECUTOR command. You use these parameters to ascertain whether a destination is reachable. The value of the MAXIMUM HOPS parameter should always be equal to or greater than the longest possible path within the network. For the network example, a maximum hop parameter value of 6 is sufficient. You should choose the maximum cost and hops values carefully, with regard to the intended use of the network, the actual network configuration, and possible failures.
NCP> SET EXECUTOR MAXIMUM COST 100 MAXIMUM HOPS 6
Values in the range 1 to 1022 are valid for the MAXIMUM COST parameter; the default value is 1022. Values in the range 1 to 30 are valid for the MAXIMUM HOPS parameter; the default value is 30. The value for the MAXIMUM HOPS parameter must be less than or equal to the value for MAXIMUM VISITS.
Figure 3.2, ''Network Circuit Costs'' illustrates the relationship between circuit costs and path costs. To send a packet from TRNTO to DALLAS, the system can route it over one of two paths, both of which require two hops; the first path is through BOSTON, the second through DENVER. However, because the path through BOSTON has a cost of 8 and the path through DENVER has a cost of 5, the system routes the packet through DENVER.
Under normal conditions, a MAXIMUM HOPS value of 3 would be sufficient for the network in Figure 3.2, ''Network Circuit Costs''. However, if the MAXIMUM HOPS value were set to 3, a failure of the TRNTO-BOSTON circuit would render TRNTO unreachable from NYC, KANSAS, or BANGOR, even though a physical path still exists (the four-hop path NYC-BOSTON-DALLAS-DENVER-TRNTO). Consideration of possible failures is also important in establishing the MAXIMUM COST parameter.
3.7.4.3. Route-Through Control Parameter
NCP> SET EXECUTOR MAXIMUM VISITS 12
If the number of nodes that the data packet visits exceeds the value of MAXIMUM VISITS, the packet is discarded. Generally, use a value that is two or three times the value for the MAXIMUM HOPS parameter. At a minimum, the value for the MAXIMUM VISITS parameter must be equal to or greater than the value for the MAXIMUM HOPS parameter. The maximum value is 63, which is also the default value.
3.7.4.4. Equal Cost Path Parameters
Circuit costs are used by DECnet to determine the optimum path over which data is to be transmitted. DECnet selects the path with the lowest cost.
NCP> SET EXECUTOR MAXIMUM PATH SPLITS 2
The default value for MAXIMUM PATH SPLITS is 1. That is, all data will go over the lowest cost path, with no splitting.
Equal cost path splitting operates most efficiently for those nodes that run VMS Version 5.4 and communicate with nodes running DECnet for OpenVMS Version 4.6 or higher. Early DECnet for OpenVMS versions do not support out-of-order packet caching; any packets received out of order are discarded. Therefore, splitting traffic over all equal cost paths may result in poor network performance.
NCP> SET EXECUTOR PATH SPLIT POLICY INTERIM
As a result of this command paths are not split for routing on all equal cost paths.
3.7.4.5. Area Path Control Parameters
When a network is divided into areas, the MAXIMUM COST and MAXIMUM HOPS parameters described previously are used to control the path between each pair of nodes within each area. A second set of routing parameters (AREA MAXIMUM COST, AREA MAXIMUM HOPS) is used to control the total cost and length of paths between level 2 routers within the whole network. In effect, these parameters control the total possible path between areas in the network.
The AREA MAXIMUM COST parameter in the SET EXECUTOR command specifies the limit on the total path cost between the local level 2 router and any level 2 router in the network. This value is the maximum cost of circuits on the longest path between level 2 routers. The AREA MAXIMUM HOPS parameter in the SET EXECUTOR command specifies the maximum number of hops that a packet can make between the local level 2 router and any other level 2 router in the network.
Use the AREA MAXIMUM COST and AREA MAXIMUM HOPS parameters to determine whether an area is reachable. Select the values for these parameters carefully, with regard for the level 2 (area) topology of the network.
NCP> SET EXECUTOR AREA MAXIMUM COST 500 AREA MAXIMUM HOPS 10
Values in the range 1 to 1022 are valid for the AREA MAXIMUM COST parameter; the default value is 1022. Values in the range 1 to 30 are valid for the AREA MAXIMUM HOPS parameter; the default value is 30.
3.7.5. Routing Message Timers
On systems that support routing, routing messages exchanged between adjacent nodes contain information about the cost and hops to each node in the network. Routing update messages are sent automatically whenever there is a change in the information (for example, when a circuit goes down). Nodes that detect the change (for example, nodes at each end of a circuit that failed) are the first to send routing update messages. The changed routing information then propagates as far as necessary to update all routers.
Routing updates are also sent periodically under control of the routing timers. These periodic transmissions ensure that routing tables are kept up to date even in the unlikely event that a routing update message is lost.
NCP> SET EXECUTOR ROUTING TIMER 240
When this timer expires, the local node sends a routing message to all adjacent nodes. Numbers in the range of 1 to 65,535 are valid for the ROUTING TIMER parameter; the default value is 600. The default is recommended.
NCP> SET EXECUTOR BROADCAST ROUTING TIMER 30
The broadcast routing timer for a node on a broadcast circuit is set to a much lower value (approximately 30 to 40 seconds) than the routing timer for a node on a non-broadcast circuit (every few minutes). Broadcast routing messages are sent more often so that full routing messages can be exchanged in case of datagram loss. The default value for this parameter is 180.
3.7.6. CI End Node Circuit Failover
On systems that support the CI, if you configure a VAXcluster using the CI as a DECnet datalink to include end nodes as well as routers, you can define a backup circuit in each end node that takes over should the primary circuit connecting the end node to its router fail.
An example is a three-node cluster comprised of one router (R) and two end nodes (E1 and E2). Each end node should have a circuit defined to the router. You can define a second circuit in each end node that connects to the other end node. The backup circuit is defined with a higher cost than the primary circuit, and its state is set to ON. Under normal circumstances, with all three nodes operational, the lower cost circuit (to the router) is used. If the router shuts down, this circuit also shuts down. The backup circuit will become the lowest cost circuit in the ON state, and will be used. The backup circuit allows the end nodes to communicate while the router is absent from the cluster.
NCP> DEFINE CIRCUIT CI-0.3 TRIBUTARY 3 COST 1 STATE ON NCP> DEFINE CIRCUIT CI-0.2 TRIBUTARY 2 COST 10 STATE ON
The first circuit is the primary circuit; the second circuit is the backup circuit.
This technique can be extended to a larger cluster with two routers and several end nodes; in each end node, two circuits of different cost are defined, one to each router. The network could then survive the failure of one router, but not both.
3.8. Logical Link Commands
Use the SET EXECUTOR command to set logical link parameters that define the maximum number of active links permitted and to set the timers that control NSP operation. Use the DISCONNECT LINK command to disconnect links while the network is running.
3.8.1. Maximum Number of Links
NCP> SET EXECUTOR MAXIMUM LINKS 30
Note that this value includes both inbound and outbound logical links. In this example, you can have only 15 links if both ends of all links are terminated locally.
NCP> SET EXECUTOR ALIAS MAXIMUM LINKS 40
When a node in a VMScluster uses an alias node identifier, two kinds of links (alias node and local node) are possible. These links are controlled by the appropriate parameter, MAXIMUM LINKS or ALIAS MAXIMUM LINKS. Refer to the VSI OpenVMS DECnet Network Management Utilities for information about logical link restrictions.
3.8.2. Disconnecting Logical Links
NCP> DISCONNECT LINK 1827 NCP> DISCONNECT KNOWN LINKS
Use the SHOW KNOWN LINKS command to obtain link status information, including link IDs, and to verify that links have been disconnected upon entering these commands (see Section 3.3, ''Node Commands''). DECnet for OpenVMS maintains and uses link addresses.
NCP> DISCONNECT KNOWN LINKS WITH NODE TRNTO
3.8.3. Logical Link Protocol Parameters
A variety of parameters exist for controlling NSP-related logical link activity. These parameters regulate the bounds for NSP connect sequences, inactivity intervals, and message retransmission. Another parameter limits the amount of nonpaged pool NSP uses for logical link transmission. You can change these parameters at any time, without affecting existing logical links.
3.8.3.1. Incoming and Outgoing Timers
NCP> SET EXECUTOR INCOMING TIMER 30
Expiration of this timer signals that a timeout has occurred. In effect, this timer protects the local node against a process that never responds to an inbound connection request.
NCP> SET EXECUTOR OUTGOING TIMER 30
A typical value for this timer ranges from 10 to 90 seconds, depending on line speed and network diameter. The network diameter is the maximum diameter over the set of shortest paths between all pairs of nodes in the network. In effect, this timer protects the user on the local node against a connection request that never completes.
3.8.3.2. Inactivity Timer
NCP> SET EXECUTOR INACTIVITY TIMER 60
When this timer expires, DECnet for OpenVMS generates artificial traffic to test the link. The timer starts after an incoming message for the link has been processed. The timer is reset if any messages are received on the link.
3.8.3.3. NSP Message Retransmission
A third group of parameters regulates the frequency of NSP message retransmission. These are the DELAY WEIGHT, DELAY FACTOR, and RETRANSMIT FACTOR parameters for the local node.
NSP estimates the current delay in the round-trip transmission to a node with which it is communicating. The value of the DELAY WEIGHT parameter is used to calculate a new value of the estimated round trip delay. The old round trip delay is weighted by a function of this statistical factor to calculate the new round trip delay. If the delay weight is set high, the retransmit time changes slowly. If the weight is set low, the observed round trip time can change quickly if the observed round trip delays vary widely, and thus the retransmit time can change more rapidly.
The value of the DELAY FACTOR parameter is multiplied by one-sixteenth of the estimated round trip delay time to determine the appropriate value for the time to retransmit certain NSP messages.
NCP> SET EXECUTOR DELAY WEIGHT 3 DELAY FACTOR 48
The default value is 80. For a complete discussion of these concepts, refer to the Network Services Protocol Functional Specification.
NCP> SET EXECUTOR RETRANSMIT FACTOR 10
If RETRANSMIT FACTOR is set to 10, NSP will not try to retransmit an eleventh time, and will disconnect the logical link.
In the process of logical link connect sequences, the value of the RETRANSMIT FACTOR parameter takes precedence over the OUTGOING TIMER value. As a result, the actual time necessary for the specified number of retransmits may not match the setting of the OUTGOING TIMER parameter.
3.8.3.4. Pipeline Quota
The PIPELINE QUOTA parameter in the SET EXECUTOR command specifies the maximum number of bytes NSP can use from nonpaged pool to buffer logical-link transmit requests. In effect, this quota determines the number of packets NSP transmits on a single logical link before waiting for a positive acknowledgment from the remote end of the link. You determine the number of packets by dividing the PIPELINE QUOTA value by the EXECUTOR BUFFER SIZE value.
The PIPELINE QUOTA value is not deducted from the byte count quota of the user process. Thus the system manager can set the process byte count quota to sensible values without concern for the nonpaged pool requirements of DECnet for OpenVMS. DECnet's nonpaged pool usage with respect to the transmission over logical links is bounded by the product of the values of the PIPELINE QUOTA and MAXIMUM LINKS parameters.
NCP> SET EXECUTOR PIPELINE QUOTA 12000
Note
The SET EXECUTOR parameter PIPELINE QUOTA should not be confused with the SET LINE parameter TRANSMIT PIPELINE. The PIPELINE QUOTA parameter relates to transmission over logical links, while TRANSMIT PIPELINE relates to datalinks. These parameters address different levels of the Digital Network Architecture.
3.9. Object Commands
|
Parameter Function |
Parameter |
|---|---|
|
Identifies object by number |
NUMBER number |
|
Identifies command procedure for starting the object |
FILE file-id |
|
Specifies connect privileges for user-level access control |
PRIVILEGES privilege-list |
|
Specifies privileges a user must possess to make outbound connections to an object |
OUTGOING CONNECT PRIVILEGES |
|
Specifies optional default proxy login access control for the object |
PROXY { INCOMING | OUTGOING | BOTH | NONE } |
|
Determines how the object will respond to incoming connect requests directed to the alias node identifier |
ALIAS INCOMING { DISABLED | ENABLED } |
|
Associates outgoing connect requests for the object with the alias node identifier |
ALIAS OUTGOING { DISABLED | ENABLED } |
|
Specifies optional default access control for inbound connects |
ACCOUNT account PASSWORD password USER user-id |
3.9.1. DECnet for OpenVMS Objects
Use the SET OBJECT command to establish and modify certain DECnet for OpenVMS objects and their command procedures.
3.9.1.1. DECnet for OpenVMS Object Identification
When defining or modifying object parameters, identify the name of the object. DECnet object names are descriptive alphanumeric strings of up to sixteen characters. DECnet software also uses object numbers as unique object identifiers. Object numbers have a range of 0 to 255. Most user-defined images are numbered 0. However, a user program should have a nonzero number assigned when it provides a known service. You may define an object name in the configuration database to a type 0 object if you want to associate required privileges or default inbound access control with the object.
NCP> SET OBJECT FOO NUMBER 129
Note that the object name may not be unique to the generic services specified. Only object numbers are unique across systems. For consistency, however, using object names as they are normally referenced throughout the network is recommended.
3.9.1.2. Using the Cluster Alias Node Identifier for the Object
On VMScluster systems, parameters for the SET OBJECT and DEFINE OBJECT commands specify how certain objects treat incoming and outgoing connection requests associated with the alias node.
By specifying the ALIAS OUTGOING parameter for a particular object, you can indicate whether the object uses the alias node address in any outgoing connect request.
NCP> SET OBJECT FOX ALIAS OUTGOING ENABLED
By default, only the object MAIL is so enabled. All other objects are disabled unless specified as otherwise.
Objects such as PHONE, which use a protocol that depends on multiple links, should not have the ALIAS OUTGOING parameter enabled.
Use the ALIAS INCOMING parameter to specify how certain objects are to respond to incoming connect requests that are directed to the alias node. You can either enable or disable specific objects from receiving these incoming connections.
NCP> SET OBJECT FOO ALIAS INCOMING DISABLED
By default, if you establish an alias node identifier for the node, ALIAS INCOMING is enabled for all objects except PHONE. If a user attempts to use an alias node address to connect to an object for which ALIAS INCOMING has been disabled, the status message is returned.
%SYSTEM-F-NOSUCHOBJ, network object is unknown at remote node
3.9.1.3. Example of Using the Cluster Alias Node Identifier
The following scenario illustrates how use of an alias node identifier can facilitate communication between a node within a cluster and a remote node.
NCP> DEFINE NODE 2.13 NAME CLUSTR
NCP> DEFINE EXECUTOR ALIAS NODE CLUSTR
Because an alias node identifier has been set, the ALIAS INCOMING parameter is enabled by default. This means that all incoming connect requests addressed to the alias node identifier are routed to a node that uses the alias.
NCP> DEFINE OBJECT MAIL ALIAS OUTGOING ENABLED
After the network is started, a user with the user name JONES logs on to node THRUSH. JONES then sends a mail message to user SMITH on node BOSTON, which is outside the cluster. Because MAIL is enabled for outgoing connect requests, it appears that JONES has sent mail from node CLUSTR. An hour later, when user SMITH reads the mail from JONES, the mail is associated with the node-identifier CLUSTR::JONES.
SMITH decides to reply to the mail from JONES. SMITH sends the mail message to JONES using the destination node CLUSTR.
Meanwhile, the node THRUSH has been taken down for maintenance, so JONES has logged on to node ROBIN. Because ROBIN has also been enabled for incoming connect requests addressed to the alias node identifier, JONES receives the mail from SMITH. The mail is addressed to CLUSTR::JONES, and is delivered to a node that uses the alias.
3.9.1.4. DECnet for OpenVMS Command Procedure Identification
For nonzero-numbered objects, the default name of this command file is SYS$SYSTEM: object name.COM. Nonzero objects are identified in the logical link connect message only by object number. Therefore, there must be an entry in the object volatile database that enables NETACP to locate the object name using the object number as a key. When you install DECnet for OpenVMS, nonzero object network-defined command procedures are entered by default in the SYS$SYSTEM directory, and NETACP knows about these command procedures. The supplied command files, named object name.COM, include FAL, HLD, NML, EVL, DTR, MAIL, PHONE, and MIRROR. Except for those command procedures supplied by Digital, you must create a command procedure for every object that can be started by an inbound connection request. You should name command procedures for nonzero objects object name.COM and place them in SYS$SYSTEM.
For zero-numbered objects, the default name of this command file is SYS$LOGIN: object name.COM. Zero objects are identified in the logical link connect message by object name. Therefore, there is no need for an entry in the object volatile database. You can, of course, specify an entry in the object database at any time. You are required to include a separate entry if you want special features such as default inbound access control information.
NCP> SET OBJECT FAL NUMBER 17 FILE SYS$MANAGER:TRIALFAL.COM NCP> SET OBJECT USERS NUMBER 0 FILE SYS$SYSTEM:USERS.COM
Note
Because REMACP is started by a RUN command in RTTLOAD.COM, there is no REMACP.COM procedure to start the object, and the software does not create a REMACP.LOG file.
NCP> SET OBJECT FAL NUMBER 17 FILE FAL.EXE
You should place the image in SYS$SYSTEM. This approach causes the object to be started up more quickly; it is useful in cases where no advantage is gained by invoking the image from a command procedure. The session log appears as part of the NETSERVER.LOG file.
3.10. Logging Commands
In order to log events, you must turn on logging. To do so, use the SET LOGGING command. Use the same command to modify any of the logging parameters. To remove any or all parameters from the volatile database, use the CLEAR LOGGING command. You must turn the logging state to OFF before attempting to use the CLEAR LOGGING command.
Source-related and sink-related parameters are mutually exclusive. Therefore, you cannot use parameters from both categories in a single command. Use the SET LOGGING EVENTS command to specify source-related events, and the SET LOGGING STATE command to specify sink-related events.
For a summary of event class and types and information about the specific events that the VMS operating system logs, see the VSI OpenVMS DECnet Network Management Utilities.
The logging component is defined by the device or process that records the events released by the event logger. The logging component can be a LOGGING CONSOLE, LOGGING FILE, or LOGGING MONITOR. The LOGGING CONSOLE is a terminal or a file that receives events on the sink node in a format the user can read. A LOGGING FILE is a user-specified file on the sink node. The logging file component receives events in the standard DNA binary format. (Refer to the DNA Phase IV Network Management Functional Specification for a description of this format.) Instead of specifying the console and a file, you can specify a system- or user-supplied LOGGING MONITOR program to receive and process DNA format-specific events. This program could possibly receive event data and adapt user application network activity to reflect this data.
If the logging sink is the LOGGING MONITOR, DECnet for OpenVMS uses the Operator Communication (OPCOM) facility to display formatted event messages on all terminals enabled as NETWORK (using REPLY/ENABLE=NETWORK). This generally includes the operator console (OPA0). The format of event messages OPCOM displays is similar to that used for console logging; however, because of restrictions in the size of messages that OPCOM can display, some messages maybe truncated slightly, and node, circuit, and line counters are not displayed at all.
NCP> SET LOGGING CONSOLE NAME SYS$MANAGER:EVENTS.LOG
To identify a logging monitor program as the logging component, use the NAME parameter followed by the program name. See Section 3.10.6, ''Using a Logging Monitor Program''.
Note
Because console logging uses normal VMS RMS file I/O, if a terminal is specified as a sink name, the terminal should not be used or allocated for any other purposes. For example, if you log in using such a terminal, events will be lost until you log out.
For descriptions of LOGGING parameters, reference to the VSI OpenVMS DECnet Network Management Utilities.
3.10.1. Event Identification
class.type
| class | Identifies the DNA or system-specific layer to which the event pertains. |
| type | Identifies a particular form of event, unique within an event class. |
For example, to specify an event in the Routing layer, you use event class 4. The event types for this class range from 0 to 14. Event type 0 indicates aged packet loss, event type 1 indicates unreachable node packet loss, and so forth. Refer to the VSI OpenVMS DECnet Network Management Utilities for a summary of events by class and type. Use the EVENTS parameter for the SET LOGGING command to specify those events to be logged. If you want to log all event classes and types, use the KNOWN EVENTS parameter. When defining the logging component, you must specify events to be logged.
| Event List | Meaning |
|---|---|
| 4.4 | Identifies event class 4, type 4 |
| 4.5–7 | Identifies event class 4, types 5 through 7 |
| 4.5,7–9,11 | Identifies event class 4, types 5, 7 through 9, and 11. Note that types must be specified in ascending order. |
NCP> SET KNOWN LOGGING EVENTS 4.4,5.1 !INVALID COMMAND NCP> SET KNOWN LOGGING EVENTS 4.7,3-4,1 !INVALID COMMAND
The first example specifies more than one event class. The second example specifies event types in numerically descending, rather than ascending, order.
NCP> SET KNOWN LOGGING EVENTS 2.*
This command identifies all event types for class 2 events.
NCP> SET LOGGING FILE EVENTS *.2-5 !INVALID COMMAND NCP> SET LOGGING FILE EVENTS 4.2-* !INVALID COMMAND
The first command specifies specific event types for all classes, which is not allowed. Unless you use the KNOWN EVENTS parameter, you can specify event type information only for a single class. The second command uses a wildcard to specify a partial range of event types, also not allowed. The wildcard character denotes the entire range of event types for a given class.
Note
Although these commands are invalid, no error message is issued and the commands’ results may not be what you intended.
3.10.2. Identifying the Source for Events
NCP> SET LOGGING CONSOLE CIRCUIT SVA-0 EVENT 4.*
Events that pertain to activity over this circuit are logged at the console by the event logger. You can perform the same operation for any remote node. If you specify no source for a component, the event logger logs events for all circuits, lines, modules, and nodes known to the local node.
You can set only one source (a circuit, module, node, or line) as the source for events in a single command.
The command CLEAR logging-component KNOWN EVENTS clears only events that are not associated with any specific source. To remove an event associated with a specific source, use the CLEAR logging-component command that specifies that source.
3.10.3. Identifying the Location for Logging Events
NCP> SET LOGGING MONITOR SINK NODE DENVER . . .
If you do not specify a location, the local node is the default.
3.10.4. Controlling the Operational State of Logging
| HOLD | Indicates that the sink is temporarily unavailable. Events destined for that location are queued. |
| OFF | Indicates that the sink is unavailable for receiving event information. Events are not logged for that sink. |
| ON | Indicates that the sink is available for receiving event information. This is the normal operational state. |
NCP> SET KNOWN LOGGING STATE HOLD
Note
You must specify the event logger object (number 26, name EVL) in the object database. If you experience difficulty with event logging, examine the event logger's own log file, SYS$MANAGER:EVL.LOG, for possible problems.
3.10.5. Event Logging Example
The example in this section illustrates how to use NCP event logging commands. You may want to log events normally to OPCOM for each node in the network. In addition, you may want each node to transmit its events to a single node to be stored in a file. For the three nodes—DENVER, TRNTO, and BOSTON—you could enter the following commands at each node to do this.
NCP> SET LOGGING MONITOR STATE ON NCP> SET LOGGING MONITOR KNOWN EVENTS NCP> SET LOGGING MONITOR SINK NODE TRNTO KNOWN EVENTS
NCP> SET LOGGING MONITOR STATE ON NCP> SET LOGGING MONITOR KNOWN EVENTS NCP> SET LOGGING CONSOLE NAME SYS$MANAGER:NETEVENTS.LOG NCP> SET LOGGING CONSOLE STATE ON NCP> SET LOGGING CONSOLE KNOWN EVENTS
Events from all three nodes are logged to all terminals enabled as network operator terminals (through the DCL command, REPLY/ENABLE=NETWORK) on node TRNTO. In addition, all local events are logged locally to the file NETEVENTS.LOG on node TRNTO. The transmitting node always specifies the destination of the event logger output and causes its locally generated events to be sent to the receiving sink node to be logged.
3.10.6. Using a Logging Monitor Program
Instead of using a logging console or a logging file, you can specify a logging monitor program to receive and process events. The logging monitor is a system- or user-supplied program. The advantage of using a logging monitor program is that it can be tailored to the specific needs of the network manager.
You can write logging monitor programs in high-level languages and design them to perform specific functions desired by the network manager. Thus, the logging monitor program can be simple or complex, depending on its design and objective.
10 ! TITLE LOGGER.BAS
!
! This is a sample logging monitor program.
20 MAP (EVENT) &
BYTE FUNCTION_CODE, &
BYTE SINK_FLAGS, &
WORD EVENT_CODE, &
STRING EVENT_TIME = 12, &
WORD SOURCE_NODE, &
STRING REST = 238
100 ! Record events released by the network event logger.
110 OPEN "SYS$NET" FOR INPUT AS FILE #1%, MAP EVENT
120 ON ERROR GOTO 998
200 ! Begin loop to extract events and write them to the terminal.
300 WHILE 1 = 1
400 GET #1%
410 EVENT_CLASS% = EVENT_CODE / 64%
420 EVENT_TYPE% = EVENT_CODE - 32% * (EVENT_CODE / 32%)
430 EVENT_CLASS$ = NUM1$ (EVENT_CLASS%)
440 EVENT_TYPE$ = NUM1$ (EVENT_TYPE%)
450 EVENT$ = EVENT_CLASS$ + "." + EVENT_TYPE$
460 PRINT "Event " ; EVENT$ ; " Reported"
499 NEXT
998 RESUME 999
999 ENDNCP> SET OBJECT LOGGER NUMBER 0 FILE LOGGER.EXE NCP> SET LOGGING MONITOR KNOWN EVENTS NCP> SET LOGGING MONITOR NAME LOGGER NCP> SET LOGGING MONITOR STATE ON
Event 0.9 Reported Event 0.9 Reported Event 4.7 Reported Event 4.10 Reported Event 4.15 Reported
3.11. Network Access Control Commands
The system manager can specify NCP commands to provide for access control at the routing initialization level, at the system level during inbound logical link connections, and at the node level during inbound and outbound logical link connections. You can also use NCP commands to control proxy login access to individual accounts and network objects at the local node. The following sections indicate the NCP commands and parameters that you can specify for access control. Refer to Section 2.8, ''Network Access Control'' for a description of DECnet for OpenVMS access control techniques.
3.11.1. Specifying Passwords for Routing Initialization
NCP> SET NODE TRNTO TRANSMIT PASSWORD VAX_NODE - _ RECEIVE PASSWORD VAX_NODE
If the password contains one or more space characters, you must delimit it with quotation marks.
NCP> CLEAR NODE TRNTO RECEIVE PASSWORD TRANSMIT PASSWORD
To provide for increased security when a remote node requests a connection over a point-to-point circuit, you can use the circuit parameter VERIFICATION INBOUND to prevent your node from revealing its routing initialization password while requiring a password from the remote node.
When two nodes communicate over a point-to-point circuit, only one of the nodes can have the VERIFICATION INBOUND parameter set. The primary function of this parameter is to permit the system manager to restrict the nodes that can initialize over a particular circuit, especially over a dialup circuit.
When a dialup node attempts to establish a dynamic connection with your node, the dynamic asynchronous circuit entry is supplied automatically to your configuration database. This entry includes the circuit parameter VERIFICATION INBOUND, which prevents your node from supplying a password to the node requesting a dynamic connection, but requires a password from the node dialing in.
Note that if you specify VERIFICATION INBOUND for a circuit, you must also specify the node parameter INBOUND ROUTER or INBOUND ENDNODE, as appropriate, for the connecting node (see Section 3.11.3, ''Node-Level Access Control Commands''). This requirement applies to both dynamic and static asynchronous connections.
NCP> SET NODE VCLST1 TRANSMIT PASSWORD HOMENODE1
NCP> SET NODE WRKVAX RECEIVE PASSWORD HOMENODE1
3.11.2. System-Level Access Control Commands
You can use the SET NODE command to specify default privileged and nonprivileged access control strings for outbound logical link requests. Use the SET OBJECT command to specify privileges required to access certain objects during inbound logical link requests. You can also use the SET OBJECT command to specify a default access control string. For NCP commands to be executed at remote nodes, you can either supply explicit access control information in the node specification, as parameters in the command, or by default.
3.11.2.1. Establishing Default Privileged and Nonprivileged Accounts
NCP> SET NODE DENVER - _ NONPRIVILEGED USER NETNONPRIV PASSWORD NONPRIV- _ PRIVILEGED USER NETPRIV PASSWORD PRIV
You should specify default information for all remote nodes with which you want to have the option of using default access control.
3.11.2.2. Specifying Privileges for Objects
Use the SET OBJECT command with the PRIVILEGE parameter to specify those privileges that cause the privileged user account to be used rather than the nonprivileged user account.
For example, you may want to make the FAL object accessible to any network user, whereas you want to control access to the NML object. The following command specifies privileges for the NML object in this instance:
NCP>SET OBJECT NML PRIVILEGES OPER
You need not specify privileges for FAL because it requires only NETMBX and TMPMBX privileges.
3.11.2.3. Specifying Privileges Required for Outgoing Connections to Objects
To prevent unauthorized access to objects, use the OUTGOING CONNECT PRIVILEGES parameter in the SET OBJECT and DEFINE OBJECT commands in NCP. This parameter specifies the privileges a user must possess to make outbound connections to an object.
Example 3.1, ''Using the SET OBJECT OUTGOING CONNECT PRIVILEGES Command'' illustrates the use of the NCP command SET OBJECT OUTGOING CONNECT PRIVILEGES. At the DCL command prompt, the user sets privileges for the process. After invoking NCP, the user specifies the privileges necessary to connect to the object TEST. Because the object TEST requires the READALL privilege to make an outbound connection, the connection fails, resulting in an error message. After the user resets the privileges to include READALL, the process is able to connect to the object.
$ SET PROCESS/PRIVILEGES=(NOALL,TMPMBX,NETMBX,OPER) $ RUN SYS$SYSTEM:NCP NCP> SET OBJECT TEST NUMBER 0 - OUTGOING CONNECT PRIVILEGES READALL OPER NCP> SET OBJECT TEST FILE SMITH$DISK:[SMITH]TEST.COM NCP> EXIT $ OPEN/READ LINK 0"SMITH CEADGUTY"::"0=TEST" %DCL-E-OPENOUT, error opening 0"smith password"::"0=test" as output -RMS-E-PRV, insufficient privilege or file protection violation $ SET PROCESS/PRIVILEGES=(NOALL,TMPMBX,NETMBX,OPER,READALL) $ OPEN/READ LINK 0"SMITH CEADGUTY"::"0=TEST" $ READ LINK RECORD
3.11.2.4. Setting Default Inbound Access Control Information
NCP> SET OBJECT HLD USER NETNONPRIV PASSWORD NONPRIV
3.11.2.5. Indicating Access Controls for Remote Command Execution
You use access control for remote NCP command execution. When you enter the SET EXECUTOR NODE and TELL commands, you can explicitly specify access control information, or you can default to information contained in the configuration database.
NCP> SET EXECUTOR NODE TRNTO"GRAY MARY":: NCP> SET EXECUTOR NODE TRNTO USER GRAY PASSWORD MARY
The same formats exist for the TELL command. Use of the standard OpenVMS node specification format allows you to use a logical name as the node-id for these commands. It is possible to override access control in a logical name with explicit access control information in the command.
NCP> SET EXECUTOR NODE TRNTO"user-id password"
3.11.3. Node-Level Access Control Commands
At the node level, you can specify access control commands that determine what connections can be made. If your node expects to receive dialup dynamic asynchronous connection requests, you can check the type of the dialup node before permitting the connection.
NCP> SET NODE A ACCESS BOTH NCP> SET NODE B ACCESS BOTH NCP> SET NODE C ACCESS BOTH
NCP> SET NODE D ACCESS OUTGOING
NCP> SET EXECUTOR DEFAULT ACCESS INCOMING
Note
The executor checks for a node ACCESS entry before it checks for the DEFAULT ACCESS entry. Remember that, if the executor's state is set to OFF or SHUT, no logical links are allowed.
NCP> SET NODE WRKVAX INBOUND ENDNODE
If the node HELIUM dials in as a router, rather than as an end node, the dynamic connection is not formed. If you specify INBOUND ROUTER for the node and it dials in as an end node, the dynamic connection is permitted.
Note that when you specify the node parameter INBOUND, you must also set the circuit parameter VERIFICATION INBOUND for the circuit over which the connection is to be made (see Section 3.11.1, ''Specifying Passwords for Routing Initialization''). If you do not set VERIFICATION INBOUND for the circuit, the node parameter INBOUND is ignored.
3.11.4. Proxy Login Access Control Commands
You can control proxy login access for accounts by modifying the executor database. To control proxy login for network objects, modify the object database.
Access to proxy accounts on the local node by proxy login is enabled by the INCOMING PROXY and OUTGOING PROXY settings in the executor database. The default values for these parameters permit both incoming and outgoing proxy access. The default setting is the recommended option. You can, however, use the SET EXECUTOR command to modify the INCOMING PROXY and OUTGOING PROXY values at the local node.
NCP> SET EXECUTOR INCOMING PROXY ENABLED NCP> SET EXECUTOR OUTGOING PROXY ENABLED
NCP> SET EXECUTOR INCOMING PROXY DISABLED NCP> SET EXECUTOR OUTGOING PROXY DISABLED
Note that if proxy access has been enabled for specific network objects, the previous SET EXECUTOR commands would not prevent a user from using a proxy account. Proxy access for network objects must also be explicitly disabled. The proxy access characteristics established in the object database take preference over the proxy access characteristics established in the executor database.
NCP> SHOW EXECUTOR CHARACTERISTICS
Incoming Proxy = Enabled Outgoing Proxy = Enabled
TRNTO::filename
TRNTO"PROXY_N"::filename
In this example, PROXY_N may be the default proxy account, or it may be another proxy account established for the remote user.
To override proxy login, the remote user with a proxy account on a node can specify NODE " ":: in the file specification,causing the default nonprivileged DECnet account to be used, because explicit null access control is passed to the remote node.
NCP> SET OBJECT FAL PROXY OUTGOING
NCP> SHOW KNOWN OBJECT CHARACTERISTICS
OBJECT = MAIL Number = 27 User id = NETNONPRIV Password = TREWQ Proxy access = outgoing
System managers use the Authorize Utility to manage the permanent proxy database, NETPROXY.DAT. Information in NETPROXY.DAT is used to construct a volatile database when DECnet is started up. You modify the volatile database when you add or delete proxies using the Authorize utility; you can also use the NCP command, SET KNOWN PROXIES ALL, to update the volatile proxy database. This command clears the contents of the volatile proxy database and rebuilds it from the permanent proxy database. SET KNOWN PROXIES ALL is executed as part of the SYS$MANAGER:STARTNET command procedure.
While SET KNOWN PROXIES ALL updates the volatile proxy database, all modifications of the permanent proxy database are handled by means of the Authorize Utility. You may not modify the individual entries in the volatile database.
3.12. Monitoring the Network
You can monitor network activity in one of two ways: by using the NCP command SHOW or by using the event logging facility and the SET LOGGING command. This section discusses the use of the SHOW and LIST commands. Refer to Section 2.7, ''Logging'' for a discussion of events and event logging, and Section 3.10, ''Logging Commands'' for a description of the SET LOGGING command.
NCP provides commands to display information about network components, whether they are defined in the volatile or permanent database. The NCP command SHOW displays information about components for the running network. The NCP command LIST performs a similar function, except that it lets you display and verify information in the permanent database. In many cases, this information is a subset of the information displayed for the volatile database.
In general, the SHOW command allows you to monitor the operation of the running network. For example, whenever someone changes the state of a circuit, the configuration of the running network in terms of reachable and unreachable nodes may be changed as well. A circuit failure could have the same effect. NCP allows you to display the status of network circuits, lines, modules, and nodes, and thereby to detect such conditions.
When you enter the SHOW and LIST commands, NCP allows you to select components and display types. You can choose among several display types, depending on the information you want. The display type determines the format and type of information NCP displays. Display types are described in the following table.
| CHARACTERISTICS | Static information usually specified in the configuration database. This may include the identification of a local node and relevant routing parameters, the names and numbers of known network objects, and the identification and cost of circuits connected to the local node. |
| STATUS | Dynamic information that usually reflects network operations for the running network. This may include the local node and its operational state, reachable and unreachable nodes and their operational states, and circuits with their operational states. |
| SUMMARY | The most useful information derived from both static and dynamic sources. This is usually an abbreviated list of information provided for both the CHARACTERISTICS and STATUS display types. |
| EVENTS | Information about events currently being logged for the logging component. This display type is valid only for the SHOW LOGGING and LIST LOGGING commands. |
| COUNTERS | Counter information for circuits, lines, modules, and nodes, including the local node. Counters are discussed in Section 3.3.6, ''Node Counters'', Section 3.5.6, ''Circuit Counters'', and Section 3.6.6, ''Line Counters''. |
If you do not specify a display type when entering a SHOW or LIST command, SUMMARY is the default. Examples of these display types and their formats are given in the VSI OpenVMS DECnet Network Management Utilities.
NCP> SHOW NODE BOSTON CHARACTERISTICS
.
.
.
NCP> SHOW KNOWN NODES CHARACTERISTICS
.
.
.For several components, there is a second form of the plural. This form is the word ACTIVE. Whereas the word KNOWN displays information for components available to the local node, the word ACTIVE displays information for all active components—that is, components whose state is other than OFF.
NCP> SHOW ACTIVE NODES CHARACTERISTICS
.
.
.NCP> SHOW ADJACENT NODES STATUS
NCP> SHOW KNOWN LOGGING SUMMARY TO SYS$MANAGER:NET.LOG
This command creates the file SYS$MANAGER:NET.LOG containing summary information of all known logging for the running network. The default file type is LIS. If the specified file already exists, NCP appends the display information to that file. If you do not specify an output file, SYS$OUTPUT is the default.
NML must have the BYPASS privilege to display passwords for the SHOW or LIST command; if it does not, no information appears if you use SHOW, and the "no access rights" message appears when you use LIST.
This command creates the file SYS$MANAGER:NET.LOG containing summary information of all known logging for the running network. The default file type is LIS. If the specified file already exists, NCP appends the display information to that file. If you do not specify an output file, SYS$OUTPUT is the default.
Chapter 4. DECnet for OpenVMS Host Services
Downline loading of an unattended system: transferring a copy of an operating system file image from an OpenVMS node to a target node.
Downline loading of a satellite node in a VMScluster from an OpenVMS node.
Downline loading of various servers from an OpenVMS node.
Downline loading of an RSX–11S task from an OpenVMS node.
Upline dumping of memory from an unattended system: transferring a copy of a memory image from an unattended target node to your OpenVMS node.
Connecting to a remote console: permitting an OpenVMS terminal to act as the console for certain unattended systems.
This chapter describes these operations. Host services are not available over asynchronous lines.
4.1. Loading Unattended Systems Downline
DECnet for OpenVMS allows you to load an unattended system using the services provided by the Maintenance Operations Module (MOM). MOM provides a set of maintenance operations over various types of circuits by using the Maintenance Operations Protocol (MOP). Downline loading involves transferring a copy of the file image of a remote node’s operating system from an OpenVMS node to the unattended target node. For example, DECnet for OpenVMS permits you to load an RSX–11S operating system file image from your OpenVMS node downline to a target node. Downline loading can be initiated by an operator at the OpenVMS node or by the target node. Both procedures are discussed in this section.
Command node. An operator-initiated downline load request originates at the command node. You use the NCP command LOAD or TRIGGER to initiate this request.
Executor node. The executor node actually performs a downline load or trigger operation.
Target node. The target node receives the bootstrap loaders and the system image file.
4.1.1. Downline System Load Operation
An operator initiates the operation with the NCP command LOAD or TRIGGER. This is called the operator-initated mode.
The target node initiates the operation by triggering its bootstrap ROM and sending a program load request to one or more potential executor node. This is called the target-initated mode.
The operator-initiated mode is used to service maintenance operations generally requested by an interactive operator. The operator enters maintenance requests using NCP. NCP delivers the request to the Network Management Listener (NML). NML then passes the request to a MOM process. The MOM process then acts upon the request. With an operator-initiated load, the local node starts the operation by sending a trigger message to the target node. Essentially, the trigger message tells an unattended target node to reboot. After the target node is triggered, it loads itself in whatever manner its primary loader is programmed to operate. The target node can request a downline load from either the executor that just triggered it or from another adjacent node. The target node can also load itself from its own mass storage device.
The target-initiated mode is used to service unsolicited maintenance requests. In this mode, the host system listens to circuits with service enabled for any MOP request directed to the local node or to a multicast address. When such a request arrives, MOM is invoked, reads the request, and processes it.
There are some subtle differences in the two modes in which MOM can execute. In target-initiated mode, the information that MOM has for fulfilling the unsolicited request comes first from the request itself. This can be data such as the "software identification" requested by the node and the type of communication device that the requesting node is using to make the request. Additional information required to fulfill the request can be obtained from the volatile database on the local node. The information supplied in the MOP request takes precedence over the information in the volatile database.
In operator-initiated mode, the information for fulfilling a request can come from NCP parameters supplied by the operator, or from the volatile database. Information supplied in the command line takes precedence over information obtained from the volatile database.
4.1.1.1. Target-Initiated Downline Load
In a target-initiated downline load, the target node sends a maintenance operation protocol (MOP) request program message. This message is a request for any eligible node to perform the load. The request program message can potentially specify a number of fields, including a software identification, a software type, and a service device.
The SERVICE parameter must be set to ENABLED for a circuit in order for MOP messages received on that circuit to be processed. When DECnet receives a MOP request program message on a circuit enabled for service operations, it creates a Maintanence Operation Module (MOM) process to handle the MOP request. There is a limit of 10 concurrent MOM processes. When this limit is reached, no additional MOP downline load requests are processed by the local node until some others complete. The MOM processes are named MOM-circuit-id_process-number (for example, MOM_SVA-0_1). Each process terminates when the load request it is processing completes.
If a point-to-point circuit connects the nodes, DECnet searches the node database for a node entry with a SERVICE CIRCUIT parameter matching the circuit over which the load was requested. DECnet uses the information from this node entry to perform the load.
If the connecting circuit type is Ethernet or FDDI, MOM determines if the request was directed to the multicast address or to the local node. If the request was directed at the local node, MOM performs the load. If the request was for the multicast address, MOM volunteers to perform the load. If a software identification is provided in the request or if a node entry is found that matches the hardware address of the target node, MOM sends a message to the requesting node volunteering to perform the load. If MOM does not get a response from the remote node, it drops the received packet and exits. Otherwise, it services the remainder of the load.
If the MOP message does not specify the target node’s requested image (using a software identification field or program type field), the MOM process reads the volatile node database which associates the image file name with the target node name.
When the MOM process has enough information, it performs the load operation. If it does not have enough information, it logs an event.
There are four possible values for program type:
Secondary loader
Tertiary loader
Operating system
Management file
The secondary loader, tertiary loader, and operating system files designate image specifications, while the management file value designates a general data specification. You can use the management file to specify additional information for downline loading that certain systems may need.
After it knows the type of file being requested, NETACP can obtain a file specification in one of two locations. The first location searched is the request program message that MOM received. The second is the node database entry for the requesting node. If the file specification is not in the node entry or in the request program message, the MOM process aborts the service request and exits. MOM checks for the existence of the load file before volunteering to perform the load. If the file is not available, MOM aborts the service request and exits.
The downline load sequence varies when a request originates from a satellite node in a VMScluster. A node in a cluster may need more input parameters than are currently defined in the volatile node database. Thus, you need to be able to dynamically configure the image to be loaded, and to transfer more parameters to the target system than those accommodated by the Parameter Load and Transfer packet. To accommodate this need, MOM calls on the services of a load assist agent to help fulfill a downline load request. The load assist agent is an image that makes calls back to MOM with data that describes the image to be loaded on the target node.
For downline loads to satellite nodes in clusters, MOM delivers all load requests to load assist agents. The node parameter LOAD ASSIST AGENT identifies a specific agent by file name. Section 4.1.2.7, ''Load Assist Agent Identification'' describes the procedure for specifying the LOAD ASSIST AGENT file specification. Another node parameter, LOAD ASSIST PARAMETER, passes an individual value to a load assist agent file. Section 4.1.2.8, ''Load Assist Parameter Identification'' describes the procedure for specifying the LOAD ASSIST PARAMETER value.
4.1.1.2. Operator-Initiated Downline Load
An operator-initiated load uses NCP to directly request MOM to perform the load operation. The target node's primary bootstrap may or may not have to be triggered depending on the state of the target. The target node is triggered primarily to put it into a known state and to force it to supply program request information.
Use the NCP command LOAD or TRIGGER to perform an operator-initiated downline load. The TRIGGER command allows you to directly trigger the remote node's bootstrap ROM, which causes the target node to send its host a request for a load operation. The programs to be loaded may come from a local disk file on the target node, another adjacent node, or the command node.
Note that the TRIGGER command may or may not initiate a downline load. One of the functions of this command is to simulate the operation that occurs when you push the BOOT button on the target node. A bootstrap operation from the local disk may result.
When you use the LOAD command, the executor node proceeds with the load operation according to the options specified in the initial load request. You obtain any required information that has been defaulted from the volatile database. With this information, the executor is thereby able to control the load sequence.
Section 4.1.2, ''Downline Load Parameters'' describes the TRIGGER and LOAD commands, their parameters, and examples of their use.
4.1.1.3. Load Requirements
The target node must be connected directly to the executor node. The executor node provides the line- and circuit-level access.
The primary loader must either be a cooperating program in the target or in the microcode of the target's device. The downline load operation usually involves loading a series of bootstraps, each of which requests the next program until the operating system itself is loaded.
The executor must have access to the load files. The location of the files can be either specified in the load request or defaulted to in the volatile database. Remote files are obtained through remote file access operations.
The target node must be able to recognize the trigger operation or must be triggered manually.
- The circuit involved in the load operation must be enabled to perform service functions. A point-to-point circuit must also be in the ON or SERVICE state; a broadcast circuit must be in the ON state. For example, the following command readies circuit SVA-0 for downline loading a node in this example:
NCP> SET CIRCUIT DMC-0 SERVICE ENABLED STATE ON
Refer to the Maintenance Operation Protocol Functional Specification for a complete description of MOP error recovery.
4.1.2. Downline Load Parameters
The most convenient method of downline loading involves setting default information in the volatile database. The operator can use the NCP command SET NODE to establish default information for the target node in the volatile database. These default parameters are also used for target-initiated downline loads, though the MOP program load message can override some of the defaults. (This default method is discussed later in this chapter.) Alternatively, you can override the default by specifying several parameters for the NCP command TRIGGER or LOAD. The following sections describe each parameter and illustrate their use.
4.1.2.1. TRIGGER Command
The TRIGGER command triggers the bootstrap mechanism of a target node, which causes the node to request a downline load. Because the system being booted is not necessarily a fully functional network node, the operation must be performed over a specific circuit. To bring up the system at the target node, use either the TRIGGER NODE or TRIGGER VIA command. If you use the TRIGGER NODE command and do not specify a loading circuit, the executor node obtains the circuit identification associated with the target node from its volatile database. If you use the TRIGGER VIA command, which indicates the loading circuit but not the node identification, the executor node uses the default target node identification in its volatile database. To identify the target node in the volatile database, specify the SET NODE command with the appropriate SERVICE CIRCUIT parameter, which establishes the circuit to be used for loading.
NCP> TRIGGER NODE BANGOR VIA DMC-0
Note that this command specifies a DDCMP circuit over which the operation is to take place.
The PHYSICAL ADDRESS parameter for the target node is required in the TRIGGER VIA command and optional in the TRIGGER NODE command.
If you do not specify a physical address in the TRIGGER NODE command, DECnet for OpenVMS derives one from the target’s DECnet address and attempts to trigger the node. A target node that is running DECnet software has set its physical address to a value derived from its DECnet address and will recognize messages sent to this address. If the target node is not yet running DECnet software, its physical address will have been set to the value of the device controller’s hardware address and messages sent to a physical address derived from the target node’s DECnet address will not be recognized. If unsuccessful in triggering the node using the physical address, DECnet for OpenVMS attempts to use the hardware address of the target node from the volatile database to trigger it. You can set in the volatile database the hardware address originally assigned to the target node’s LAN adapter by specifying the HARDWARE ADDRESS parameter in the SET NODE command. (Refer to Section 2.1.2, ''Hardware Addresses and Physical Addresses'' for a description of LAN addressing.)
Figure 4.1, ''Operator-Initiated Downline Load over Ethernet Circuit (TRIGGER Command)'' illustrates the use of the TRIGGER NODE command for downline loading a target node over Ethernet circuit UNA-0.
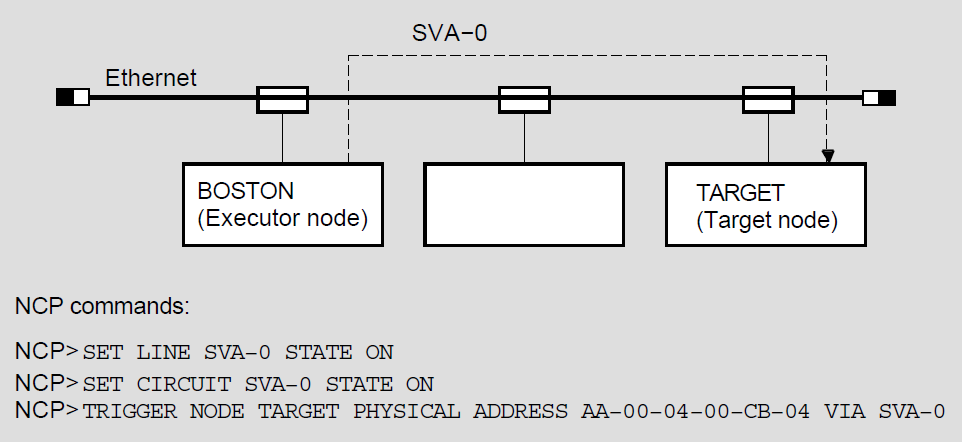
When you use the TRIGGER command, how the system load is performed may not always be obvious. Essentially, this command provides the trigger message that controls the restart capability for an unattended target node. After the target node is triggered, it loads itself in whatever manner its primary loader is programmed to operate. The target node can request a downline load from either the executor that just triggered it or another adjacent node, or the target node can load itself from its own mass storage device.
One parameter that you can specify for the TRIGGER command is SERVICE PASSWORD. This parameter supplies a boot password, which may be required by the target node (see Section 4.1.2.11, ''Service Passwords''). If you do not specify this parameter, a default value from the volatile database is used. Use the SET NODE command to establish a default value for this parameter in the volatile database. If no value is set in the volatile database, the value is 0.
4.1.2.2. LOAD Command
NCP> LOAD NODE BANGOR
The LOAD NODE command requires the identification of the service circuit over which to perform the load operation. If you do not explicitly specify a service circuit in this command, the executor node uses the SERVICE CIRCUIT from the volatile database entry for the target node. Use the SET NODE command to include the SERVICE CIRCUIT entry in the volatile database. Alternatively, you can explicitly include the circuit, for example:
NCP> LOAD VIA SVA-0
The executor node obtains the rest of the necessary information from its volatile database. The LOAD NODE and LOAD VIA commands work only if the target node can be triggered by the executor or if the target has been triggered locally.
If the loading circuit is an Ethernet or FDDI circuit, the executor node uses the physical address of the target node to differentiate the node from other adjacent nodes on the same circuit. Specify the PHYSICAL ADDRESS parameter in the LOAD VIA command. The PHYSICAL ADDRESS parameter is optional in the LOAD NODE command.
If you do not specify the PHYSICAL ADDRESS parameter in the LOAD NODE command, DECnet for OpenVMS derives the physical address from the target node’s DECnet address and attempts to load the target node.
A target node running DECnet software has set its own physical address and recognizes this address; otherwise, the target node recognizes only the hardware address set by the manufacturer. If unsuccessful in loading the node, the executor node attempts the load using the hardware address of the target node from the volatile database.
In the volatile database, you can set the hardware address originally assigned to the target node’s LAN adapter. To do this specify the HARDWARE ADDRESS parameter in the SET NODE command. (Refer to Section 2.1.2, ''Hardware Addresses and Physical Addresses'' for a description of LAN addressing.)
You can set in the volatile database the Ethernet hardware address originally assigned to the target node's DEUNA or DEQNA controller, by specifying the HARDWARE ADDRESS parameter in the SET NODE command. (Refer to Section 2.1.2, ''Hardware Addresses and Physical Addresses'' for a description of Ethernet addressing.)
Figure 4.2, ''Operator-Initiated Downline Load over Ethernet Circuit (LOAD Command)'' illustrates how to use the LOAD command for downline loading over Ethernet circuit SVA-0.
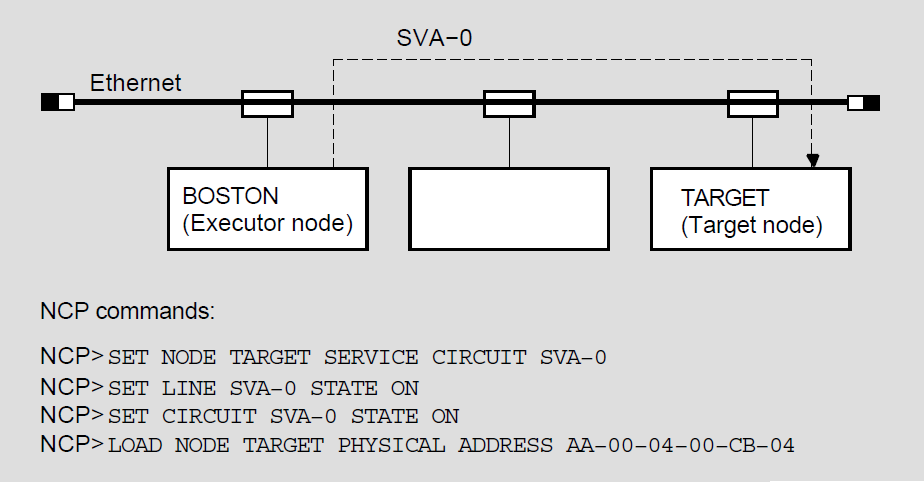
- The host node that the target node is to use when the target comes up
- HOST node-id
- The identification of the load file
- FROM file-id
- The identification of the loader programs
- SECONDARY LOADER file-id
- TERTIARY LOADER file-id
- The software type to be loaded downline first
- SOFTWARE TYPE software-type
where:
software-type can be any of the following:- SECONDARY LOADER
- TERTIARY LOADER
- SYSTEM
- MANAGEMENT FILE
Note
You must use the SOFTWARE IDENTIFICATION parameter if you specify the SOFTWARE TYPE parameter.
If you do not specify SOFTWARE TYPE in the first MOP program request, the NCP command, or the volatile database, the default is SECONDARY LOADER.
- The identification of the CPU type and the corresponding software identification
- CPU cpu-type
- SOFTWARE IDENTIFICATION software-id
- The identification of the target node's line device type that is to handle service operations
- SERVICE DEVICE device-type
- The identification of the service password for triggering the target node's bootstrap mechanism
- SERVICE PASSWORD hex-password
- The identification of the VMS image that defines system software for downline loading to a node in a Local Area VAXcluster
- LOAD ASSIST AGENT file-spec
- The identification of an additional parameter to be included in a load assist agent file
- LOAD ASSIST PARAMETER item
When entering the LOAD NODE and LOAD VIA commands, you can specify any or all of the preceding parameters. Any parameter not specified in the command defaults to whatever information is specified in the volatile database. Use the SET NODE command to establish default information for the target node's parameters in the volatile database.
4.1.2.3. Host Identification
NCP> SET NODE BANGOR HOST NYC
If you do not specify the host, the executor serves as the default host. You can override any default information by using the HOST parameter for the LOAD command.
4.1.2.4. Load File Identification
The load files are the files to be loaded downline to the target node. These files include the secondary loader, the tertiary loader and the operating system image, and the file specification for the management file. You can specify default load file names in the volatile database with the corresponding SECONDARY LOADER, TERTIARY LOADER, LOAD FILE, and MANAGEMENT FILE parameters of the SET NODE NCP command.
4.1.2.5. Management File Identification
The management file specifies a data file containing additional management information necessary for downline loading to a target node. You can supply a management file by specifying the MANAGEMENT FILE parameter with a LOAD NODE or LOAD VIA command. You can also establish the management file value in the node database using the SET NODE command.
NCP> SET NODE BANGOR MANAGEMENT FILE MANAGE.DAT
4.1.2.6. Software Type
NCP> LOAD NODE BANGOR SOFTWARE TYPE OPERATING SYSTEM
Use the SET NODE command to specify default software type information for the target node entry in the volatile database. If no software type information is specified in the volatile database, the default type is the secondary loader.
4.1.2.7. Load Assist Agent Identification
NCP> LOAD NODE REDSOX LOAD ASSIST AGENT SYS$SHARE:NISCS_LAA.EXE
This command specifies a file containing a specific load assist agent.
4.1.2.8. Load Assist Parameter Identification
NCP>SET NODE REDSOX LOAD ASSIST PARAMETER SYS$SYSDEVICE:[SYS9.]
This command passes an additional parameter to the load assist agent.
4.1.2.9. CPU and Software Identification
NCP>SET NODE BANGOR SOFTWARE IDENTIFICATION RSX_11S_V3.2
4.1.2.10. Service Circuit Identification
In terms of the executor, the service circuit is a circuit connecting the executor node with an adjacent target node. When you use the LOAD and TRIGGER commands, specify or default to a circuit over which the load operation is to take place. Use the VIA parameter to explicitly identify the circuit when entering these commands. If specifying an Ethernet or FDDI broadcast circuit in the LOAD VIA command, include the PHYSICAL ADDRESS parameter.
If you do not specify a circuit, this information defaults to the circuit specified by the target node’s entry in the executor node’s volatile database. To set a service circuit in the volatile database, use the SET NODE command.
4.1.2.11. Service Passwords
When defining nodes for downline loading in the local volatile database, the system manager can specify a default service password. This password may be required to trigger the primary bootstrap mechanism on the target node. If you enter a LOAD or TRIGGER command without a service password, then this default parameter is used if the target node requires one. To set a service password in the volatile database, use the SET NODE SERVICE PASSWORD command. For Ethernet or FDDI adapters that support the setting of service passwords, this password must be a hexadecimal number in the range of 0 to FFFFFFFFFFFFFFFF.
For DDCMP adapters, the range is 0 to FFFFFFFF.
NCP> SET NODE BANGOR SERVICE PASSWORD FEFEFEFE NCP> LOAD NODE BANGOR
Note
To obtain service passwords from the permanent and volatile network databases, users must have OPER privilege.
4.2. Dumping Memory Upline from an Unattended System
As a DECnet for OpenVMS system manager, you can include certain SET NODE parameters in the volatile database that allow an adjacent unattended node to dump its memory into a file on your node. This procedure is referred to as upline dumping. It is a valuable tool for crash analysis; that is, programmers can analyze the dump file and determine why the unattended system failed. If you configure a system for upline dumping, this unattended system requests an upline dump when it detects an impending system failure; for example, an RSX–11S operating system may request an upline memory dump to an OpenVMS node.
For upline dump operations, the local node is referred to as the executor and the adjacent unattended node as the slave.
4.2.1. Upline Dump Procedures
This section describes the procedures for an upline dump initiated by a slave node. DECnet uses the maintenance operation protocol (MOP) to perform an upline dump operation. MOP is a protocol that defines messages used for circuit testing, triggering, downline loading, and upline dumping. Refer to the Maintenance Operation Protocol Functional Specification for a more complete discussion.
When a slave node senses a system failure, it sends a memory dump request to the host node, or, on the Ethernet or FDDI LAN, to a dump assistance multicast address if a host is not available. The request is a MOP request dump service message. This message may contain information about the slave’s memory size (DUMP COUNT) and the upline dump device type at the slave.
If the message from the slave includes a DUMP COUNT value, the host node uses it. Otherwise, the host node checks the slave node’s entry in its volatile database for the DUMP COUNT, the target address from which to start dumping (DUMP ADDRESS), and the file where the memory will be stored (DUMP FILE) for the slave. (If no entry exists for DUMP ADDRESS, the value defaults to 0.) The host node, which can now be considered the executor, sends a MOP request memory dump message to the slave with the starting address and buffer size values.
Using the values it receives from the executor, the slave returns the requested block of memory in a MOP memory dump data message. The executor receives the block of dump data, places it in the DUMP FILE, increments the DUMP ADDRESS by the number of locations sent, and sends another request memory dump message to the slave. This sequence is repeated until the amount of memory dumped matches the DUMP COUNT value. The executor then sends a MOP Dump Complete message to the target.
When the upline dump is complete, the executor node automatically attempts to downline load the slave system. It initiates the downline load by sending a TRIGGER message to the slave (see Section 4.1, ''Loading Unattended Systems Downline'').
Figure 4.3, ''Upline Dumping of RSX–11S Memory'' illustrates the upline dump procedure.
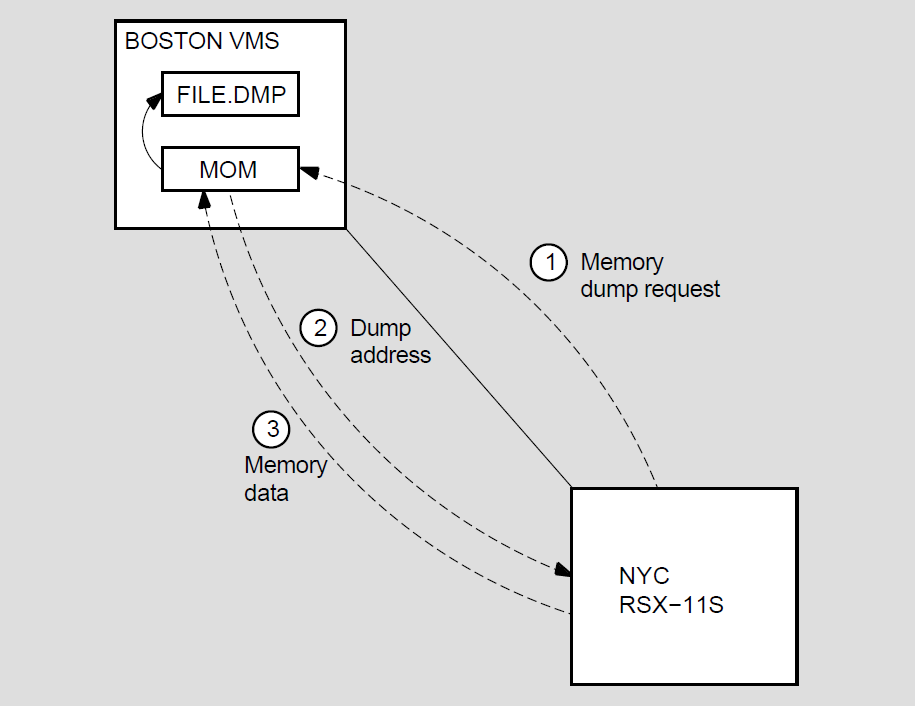
The target node sends a memory dump request to the dump assistance multicast address AB–00–00–01–00–00 (described in Section 2.1.3, ''LAN Multicast Addresses''). This message is a request for any node on the Ethernet or FDDI circuit to receive an upline memory dump.
The nodes on the LAN whose circuits are enabled to perform service functions check their own databases to determine if they can accept an upline dump. If so, they respond to the target node. The target chooses the node responding first to continue the dumping sequence. The target does not send a message to any other node. The loading sequence continues normally from there. Note, however, that you may have to look for event 0.3 in the event logs for all nodes on the Ethernet or FDDI circuit to determine which node received the dump. See the VSI OpenVMS DECnet Network Management Utilities for a summary of all NCP events.
4.2.2. Upline Dump Requirements
The slave node must be directly connected to the executor node by a physical line. The executor node provides the line- and circuit-level access.
The slave node must be capable of requesting the upline dump when it detects a system failure. If the dumping program does not exist on the slave, upline dumping cannot occur.
- The circuit involved in the dump operation must be enabled to perform service functions. It must also be in the ON state. For example, the following command readies circuit SVA–0 for upline dumping node BANGOR in the network example:
NCP> SET CIRCUIT SVA-0 SERVICE ENABLED STATE ON
If the slave does not supply the DUMP COUNT value, the executor must have this value in its volatile database.
The executor must have a DUMP FILE entry in the volatile database. If the file-id specifies a remote node, the executor transfers the data using remote file access routines.
4.3. Loading RSX–11S Tasks Downline
Downline task loading extends nonresident initial task load, checkpointing, and overlay support to a DECnet RSX–11S node. You can load an RSX–11S task downline by using the Satellite Loader (SLD) on the DECnet–11S node and the host loader (HLD) on the DECnet for OpenVMS node. SLD uses the intertask communication facilities of RSX DECnet–11S to communicate with HLD. Figure 4.4, ''Downline Task Loading'' illustrates one instance of this relationship.
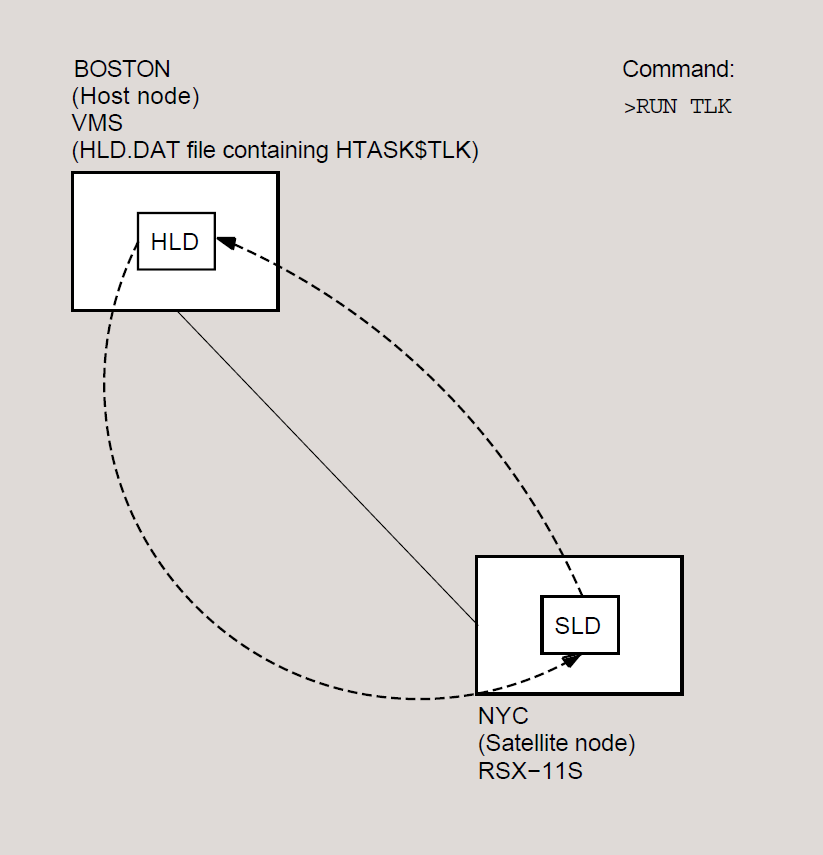
By entering RUN TLK at the operator's console of the satellite system, SLD requests HLD to load the task downline from a DECnet for OpenVMS node on which the file is located. Any request from the satellite or host node could also initiate this operation by means of SLD and HLD.
4.3.1. Setting Up the Satellite System
>VMR ENTER FILENAME:RSX11S VMR>INS SLD VMR>FIX LDR...
Note
The information in this section is specific to DECnet–RSX. For more information, refer to the related DECnet–RSX documentation.
>VMR ENTER FILENAME:RSX11S VMR>INS TLK
In this example, entering RUN TLK on a terminal connected to the RSX–11S remote system initiates the downline task load of the file TLK.TSK.
>VNP RSX11S VNP>SET EXECUTOR HOST 11
4.3.2. Host Loader Mapping Table
HLDTB$ HTASK$ TLK,<TRNTO::SYS$SYSDISK:[LOW]TLK>,UNM HTASK$ TLK,<SYS$SYSDISK:[LOW.EXT]TLK>,MAP HNODE$ BANGOR HTASK$ NCP,<SYS$SYSDISK:[LOW]NCP11S>,LUN HTASK$ ...LOA,<SYS$SYSDISK:[TEST]LOA> HNODE$ NYC HTASK$ ...MCR,<B:[RSX11S.UNMAPPED]BASMCR> .END
|
HLDTB$ |
Defines the file as the HLD mapping table. | |
|
HTASK$ |
Defines a task entry. The arguments for HTASK$ are
taskname,<filespec>,[opt-arg] | |
| taskname | Is the installed task name used to run the task on the RSX–11S system. | |
| filespec | Is the task file specification on the host node. You must use angle brackets (<>) to enclose the file specification. | |
| opt-arg | Are optional arguments—MAP, UNM, LUN. | |
|
HNODE$ |
Defines the exclusive target node upon which the HTASK$ can execute. | |
A task entry contains the name of the installed task, a file specification, and an optional control argument. When you use the file specification in the HTASK$ macro, you can omit the file type that defaults to TSK. A node entry contains only the node name.
Any task entries that precede the first node entry are called general-purpose tasks. You can load a general-purpose task into any RSX–11S node in the network. Task entries that follow a node entry can be sent only to that particular node.
The same task name can appear more than once in the general-purpose task list. This allows both mapped and unmapped RSX–11S systems to share installed task names. The control argument for a general-purpose task is either MAP or UNM. The default is MAP.
Tasks to be loaded downline must be installed in the RSX–11S system, which initializes the task's logical unit number (LUN) assignments. LUN-fixing is an SLD feature that reinitializes the LUNs after the task has been loaded downline. This feature allows a single task to be loaded into multiple RSX–11S systems that may have different systemwide device assignments. SLD permits you to place a task in a general-purpose task list. You can downline load either a general-purpose task or a task after a node entry.
If you place a task in a general-purpose task list, you can add new nodes to the network and can downline load general-purpose tasks to those nodes without changing the mapping table. Nodes that are to receive only general-purpose tasks need not be mentioned in HLD.DAT. Note, however, that general-purpose tasks cannot be checkpointed.
4.3.3. HLD Operation and Error Reporting
When SLD attempts to connect to HLD, NETACP on the DECnet for OpenVMS node uses the default inbound access control information specified for the HLD object by the system manager (see Section 3.11, ''Network Access Control Commands''). You must make sure that the files associated with the tasks to be loaded or checkpointed are accessible from the resulting process created by this connection. The RSX-11S system must have READ and WRITE access to directories on the host system in which satellite tasks reside.
When the load operation completes, whether successfully or unsuccessfully, the log file SYS$LOGIN:NETSERVER.LOG (described in Section 2.6.3, ''Creating DECnet for OpenVMS Network Server Processes'') contains information describing the operation, the node, and the task. This information may consist of an error returned from RMS or certain HLD-specific messages that indicate either errors in HLD.DAT or inconsistencies in the file to be loaded. Messages associated with these inconsistencies are listed in the following section.
4.3.3.1. HLD Error Messages
The following is a list of HLD error messages.
Format error in HLD.DAT
The format of the HLD mapping table is incorrect. For example, this error could occur if HNODE$ was expected but not found in the table. Re-create the table, using the appropriate format.
Syntax error in HLD.DAT
The syntax of an element in the HLD mapping table is incorrect. For example, the angle brackets needed to enclose the file specification are missing. Re-create the table.
Task name not found
The task to be loaded downline is not specified in the HLD mapping table. Re-create the table so that it contains this task name.
No header in task file
The file was built with the /-HD switch. Therefore, it is an invalid RSX–11S task image. Rebuild the task.
Mapped task not on 4K boundary
The file was not built with the /MM switch. This error is for mapped RSX–11S systems only. Rebuild the task.
Unmapped partition mismatch
The TKB address does not correspond with the starting address of the partition in the RSX–11S system. This error is for unmapped RSX–11S systems only. Rebuild the task with a PAR= statement that specifies the correct starting address.
File too big for partition
The initial load size of the file is larger than the partition size in the RSX–11S system. Either make the partition larger or rebuild the file to use a smaller partition size.
Partition too big for checkpoint space
The partition size in the RSX–11S system is larger than the checkpoint space inside the file. Typically, this indicates that the partition size in your PAR= statement is smaller than the actual size of the partition in the RSX–11S system. Although the load size of a task may be much smaller than its partition, the entire partition is transferred during checkpoint operations. Rebuild the task with the exact partition size from the RSX–11S system.
4.3.4. Checkpointing RSX–11S Tasks
Checkpointing allows the execution of a task to be interrupted when a higher priority task installed in the same partition becomes active. The software writes the interrupted task from RSX–11S memory to a checkpoint file on the host (Checkpoint Write) and then loads the higher priority task into the partition and activates it. When the priority task exits, the software restores the interrupted task into main memory (Checkpoint Read), where it continues executing.
Note that checkpointing implies that a job is already running in the partition. Checkpoint space must be allocated inside the task being loaded downline (through the /AL switch during RSX–11S task build).
4.4. Connection to Remote Console
DECnet for OpenVMS allows you to set up a logical connection between your VMS node and the console interface on certain unattended nodes, in effect permitting your terminal to act as the console for the remote system. For example, your terminal can act as the console for the Ethernet Communications Server (DECSA) hardware and its resident software, such as the Router Server. The console carrier requester on the host connects to the console carrier server on the server.
You can set up the logical connection to the console using the remote console facility (RCF). Both your host node and the target node (that is, the server node) must be on the same Ethernet or FDDI LAN. You can use the RCF to force a crash if the server node becomes unresponsive. (To determine how to force a crash, see the appropriate documentation for the particular server product.) RCF also permits debugging under special circumstances.
To use the RCF to connect to a DECSA, you must be sure the console carrier server image and its loader file are present in the system directory on the host node. (The file name of the console carrier server image is PLUTOCC.SYS and that of the loader is PLUTOWL.SYS.) To invoke RCF, specify either the CONNECT NODE or CONNECT VIA command. The VMS operating system then uses the loader file to downline load the console carrier server image into the Ethernet Communications Server hardware unit.
Use the CONNECT NODE command if the name of the target node is known. If the target node’s service password and service circuit are defined in the host node’s volatile database, you can use these default values. If the hardware address of the server node is not defined in the volatile database, you must specify the PHYSICAL ADDRESS parameter in the CONNECT NODE command. If you specify the physical address of the target node, DECnet for OpenVMS attempts to use it to load the image file. If you do not supply a PHYSICAL ADDRESS in the CONNECT NODE command, DECnet will obtain the hardware address for the target node in the volatile database, first attempting to use this address, and then attempting to use the physical address derived from the target node address in the volatile database.
To define default information in the volatile database for the target node, use the NCP command SET NODE to specify the SERVICE PASSWORD, SERVICE CIRCUIT, and HARDWARE ADDRESS parameters for the target node. You can override the target node parameter values currently defined in the volatile database by specifying new values in the CONNECT command.
NCP>CONNECT NODE RTRDEV SERVICE PASSWORD FEFEFEFEFEFEFEFE - _ VIA SVA-0 PHYSICAL ADDRESS AA-00-04-00-38-00
Use the CONNECT VIA command if the node name of the target node is not known. In this command, specify the service circuit over which the logical connection is to be made and the physical address of the target node.
Hardware address required
This message indicates that you must specify a physical address for the target node in your CONNECT command, because no hardware address is available in the volatile database.
Console in use
Console connected (press CTRL/D when finished)
Target does not respond
The remote console is supposed to respond quickly to inputs but is not doing so, or no connection can be made.
Ensure that a unique DECnet address is being used for the remote node. If this address is not supplied in the CONNECT command itself, it is obtained from the volatile node database of the local node.
Chapter 5. Configuring a Network
This chapter explains how to set up your VMS operating system for use in a DECnet for OpenVMS network and provides sample configuration examples for various types of networks. The VSI OpenVMS DECnet Guide to Networking provides a summary of basic instructions for bringing up a DECnet for OpenVMS node in the network.
5.1. Prerequisites for Establishing a Network
Before configuring your DECnet for OpenVMS node, you need to satisfy certain prerequisites for DECnet for OpenVMS operation, such as setting up user accounts and directories, defining user privileges, and registering the Product Authorization Key (PAK) to enable your DECnet for OpenVMS license.
5.1.1. Required Privileges
To perform any kind of network activity, a process must have the appropriate privileges. As system manager, you define a user’s privileges in the user authorization file (UAF). Table 5.1, ''Privileges for NCP Operations'' lists common operations and their required privileges.
| Operation | Required Privileges |
|---|---|
|
Start the network |
ACNT, CMKRNL, SYSNAM, and DETACH |
|
Perform task-to-task communication |
NETMBX is required to assign a channel to the NET device. TMPMBX is required to optionally associate a temporary mailbox with a network channel. |
|
Create a logical link |
NETMBX |
|
Declare a name or object number in a user task |
SYSNAM (See VSI OpenVMS DECnet Networking Manual for information about user tasks.) |
|
CLEAR parameters from the volatile database |
NETMBX and OPER |
|
Issue CONNECT commands |
NETMBX |
|
COPY KNOWN NODES |
NETMBX, TMPMBX and OPER (SYSPRV is also needed if access to the permanent node database is required or if the WITH option is used.) |
|
DEFINE parameters in the permanent database |
SYSPRV and OPER? |
|
DISCONNECT LINKs |
NETMBX and OPER |
|
LIST parameters kept in the permanent database |
SYSPRV? |
|
LIST service passwords kept in the permanent database |
SYSPRV and OPER? |
|
LIST receive passwords, transmit passwords, and object and executor access control passwords kept in the permanent database |
BYPASS |
|
Issue LOAD commands |
NETMBX, TMPMBX and OPER |
|
Use LOOP CIRCUIT |
NETMBX, TMPMBX and OPER |
|
Use LOOP EXECUTOR |
NETMBX and TMPMBX |
|
PURGE parameters from the permanent database |
SYSPRV and OPER? |
|
SET parameters kept in the volatile database |
NETMBX and OPER |
|
Issue SET EXECUTOR NODE |
Requires NETMBX and TMPMBX privileges on the local node, and NML on the executor node must have appropriate privileges to perform the commands issued after the SET EXECUTOR NODE command. |
|
Use "SET component ALL" to load parameters from the permanent database to the volatile database |
NETMBX, OPER and SYSPRV? |
|
SHOW parameters kept in the volatile database |
NETMBX |
|
SHOW service passwords kept in the volatile database |
NETMBX and OPER |
|
SHOW receive passwords, transmit passwords, and access control passwords kept in the volatile database |
NETMBX and BYPASS |
|
Issue TELL commands |
Requires NETMBX and TMPMBX on the local node, and NML on the executor node must have sufficient privileges to perform the command that follows TELL. |
|
Issue TRIGGER commands |
NETMBX, TMPMBX and OPER |
|
ZERO counters |
NETMBX and OPER |
Refer to Section 3.11, ''Network Access Control Commands'' for a further discussion of network user privileges and their function in relation to overall network security.
5.2. Configuration Procedures
This section discusses the tasks to prepare a networking environment.
Configure your DECnet for OpenVMS permanent database. Use the interactive procedure SYS$MANAGER:NETCONFIG.COM to configure a new system or to completely re-create the configuration database for an existing system. NETCONFIG.COM prompts you for all the information needed to configure the permanent database and, optionally, to set up DECnet object accounts on your system for certain network objects.
If you choose not to use the NETCONFIG.COM procedure, you must use NCP commands to build the permanent database. Or you can use the NETCONFIG.COM procedure to build the permanent database and then use NCP commands to tailor the database to your own needs.
Also, you can use the NCP command COPY KNOWN NODES to build or update the remote node entries in your node database.
To upgrade access control information on a node that has already been configured, you can use SYS$UPDATE:NETCONFIG_UPDATE.COM which changes only the default access options recorded in the node’s configuration database, and leaves all other network environment settings intact. See Section 5.2.2.2, ''NETCONFIG_UPDATE.COM for Existing Network Configurations'' for information about the NETCONFIG_UPDATE.COM procedure.
You may have to perform additional configuration tasks depending upon your specific network requirements.
If you are planning to run DECnet for OpenVMS in a VMScluster, take special care when setting the system parameters SCSNODE and SCSSYSTEMID. Set SCSNODE to match the executor node name.
Set SCSSYSTEMID to match the executor address. When setting SCSSYSTEMID, use the algorithm for converting a node address to its decimal equivalent, as explained in Section 3.7.2, ''Specifying the Area Number in a Node Address''. Section 5.4, ''System Configuration Guidelines'' provides additional information about setting up system parameters. Section 5.4.4, ''Permanent Database Considerations in VAXclusters'' discusses special considerations that apply to configuration of the permanent database for systems that support cluster node capability.
If you plan to run DECnet for OpenVMS over a CI, load the DECnet driver CNDRIVER. If you will be using some of your terminal lines as DECnet for OpenVMS lines, load the asynchronous DDCMP driver NODRIVER and set up the static or dynamic asynchronous lines. Section 5.2.3, ''Tailoring the Configuration Database'' describes these tasks in detail.
5.2.1. Default Access Options
When access control information has not been explicitly supplied by the network user, DECnet for OpenVMS uses either the default account (if any) associated with a network object, or the default account specified for the executor.
The NETCONFIG.COM procedure provides four different ways to control default access.
The most restrictive approach is to configure the node’s networking environment using the NETCONFIG.COM procedure, and instruct the procedure not to create any default DECnet accounts for the network objects or a default DECnet account. No incoming, default access would be permitted.
A less restrictive approach is to grant default access for certain objects and to not create the default DECnet account. At your option, the NETCONFIG.COM procedure can create the following specific accounts for some network objects. You can specify that the NETCONFIG.COM procedure create any combination of these accounts. The accounts are:
- MAIL$SERVER [376,374]
- FAL$SERVER [376,373]
- NML$SERVER [376,371]
- MIRRO$SERVER [376,367]
- PHONE$SERVER [376,372]
- VPM$SERVER [376,370]
This scheme is different from the default DECnet account, which provides default access for all incoming links, unless overridden by other forms of access control. The specific default accounts, when used with other system security facilities, enable a network manager to monitor these accounts and more easily detect unauthorized access.
For each default account that you create, the NETCONFIG.COM procedure generates a password and registers it in your network configuration database.
Such system-generated passwords are more secure than the passwords that users typically create.
A less restrictive approach is to create a default DECnet account, [376,376], for all network objects but to disable default access to a type 0 object. A type 0 object is also known as TASK object. This default access scheme is appropriate only for those systems with very low security requirements.
The least restrictive approach is to create an unrestricted default DECnet account that includes default access to all objects; this type of access is suitable for small systems with very low security requirements. To do so, you must override the defaults provided by the NETCONFIG.COM procedure.
5.2.1.1. Specific Default Accounts
MAIL provides personal mail service.
The file access listener (FAL) object, provides authorized access to the file system of a DECnet node on behalf of processes executing on any node in the network.
The FAL object can make a system vulnerable to unauthorized access by allowing network access by any remote user to any files with world read access. It also allows any remote user to create files in any directory with world write access.
VSI recommends that you do not create any default account for FAL. Other, more secure access methods are available.
PHONE allows you to communicate with other users on your system or on other DECnet for OpenVMS systems.
A default DECnet account can allow unauthorized users to use Phone to get a list of users currently logged in to the local system. A user could then attempt to log in to the system by using the list of user names.
The network management listener (NML) object provides remote management of the local system. A default nonprivileged account for this object lets remote users issue NCP commands to gather and report network information from your node’s DECnet databases.
The MIRROR object is used for loopback testing. To test DECnet for OpenVMS with the User Environment Test Package (UETP), a default account for the MIRROR object must exist.
The VPM object is used by the Monitor utility (MONITOR) in VMScluster configurations.
Refer to the VSI OpenVMS Guide to System Security for more information about these access methods and the security implications of these default accounts.
5.2.2. Using NETCONFIG.COM
You must have the privileges SYSPRV and OPER to execute NETCONFIG.COM.
To invoke the command procedure, enter the following command:
$ @SYS$MANAGER:NETCONFIG.COM
NETCONFIG.COM performs the following steps:
Prompts you for the name and address of your node.
What do you want your DECnet node name to be? : What do you want your DECnet address to be? :
The node name is a string of up to six alphanumeric characters, containing at least one alphabetic character. The node address is a numeric value in the format:
area-number.node-number
where:
area-number
Designates the area in which the node is grouped (in the range 1 to 63).
node-number
Designates the node’s unique address within the area (in the range 1 to 1023).
If the network is not divided into two or more areas, you need not provide the area number; the system supplies the default area number 1.
On processors that support full routing capabilities, asks if you want to operate as a router.
Do you want to operate as a router? [NO (nonrouting)]:
If you type NO (or take the default NO by pressing the RETURN key) in response to this question, the executor node is set up as a nonrouting node.
If you type YES, the EXECUTOR TYPE will be defined to ROUTING IV.
If you want the node to be an area router, type YES but choose not to start DECnet in step 9. Issue the NCP DEFINE EXECUTOR TYPE AREA command prior to starting DECnet.
Displays the location of your object database file and asks if you want to purge it.
The network object database file is SYS$COMMON:[SYSEXE]NETOBJECT.DAT;4. Do you want to purge the object database? [YES]:
The default is to purge the database. However, if the node shares an object database with other nodes (as is commonly done with nodes in a VMScluster), and you want to preserve the common object database, answer NO to this question.
Asks whether you want one or several default nonprivileged DECnet accounts.
You may also indicate that no default accounts should be created on your system.
Do you want a default DECnet account? [NO]:
If you responded YES to a default DECnet account, you will see the following question:
Do you want default access to the TASK object disabled? [YES]:
The next four questions will be asked regardless of whether you responded YES or NO to a default DECnet account.
Do you want a default account for the MAIL object? [YES]: Do you want a default account for the FAL object? [NO]: Do you want a default account for the PHONE object? [YES]: Do you want a default account for the NML object? [YES]:
The next two questions will be asked only if you responded NO to a default DECnet account.
Do you want a default account for the MIRROR object? [YES]: Do you want a default account for the VPM object? [YES]:
Determines which DECnet devices you have on your system for use in building the line and circuit permanent databases.
Creates and displays a command procedure of the NCP, AUTHORIZE, and DCL commands required to configure your DECnet for OpenVMS node. The commands define the permanent database parameters for the executor; all lines, circuits, and objects; and all logging monitor events. The commands do not define the remote node database.
Asks if you want these commands to (be executed:
Do you want these commands to be executed? [YES]:
Carefully review the displayed commands. If you respond NO, the procedure returns a message indicating that no changes have been made. If you choose to run the command procedure, it does the following:
Purges any existing information from the permanent executor, line, circuit, logging, and module configurator databases.
Purges the object database unless you choose the option in step 3 to not purge the object database.
Establishes the executor, line, circuit, and logging databases (but not the remote node database) in the permanent configuration database at your node.
NETCONFIG.COM estimates the amount of BYTLM quota the NETACP process will require to start your lines and circuits. NETCONFIG.COM issues a warning if the NETACP$BUFFER_LIMIT system logical should be defined before DECnet is started, for example:
WARNING: NETACP will require more BYTLM process quota to start your lines and circuits properly. Before starting DECnet, define the NETACP$BUFFER_LIMIT system logical to be at least 33460. Define an even higher BYTLM value if you will be raising the number of line receive buffers, increasing line buffer sizes, or enabling service on any circuits.
See Section 5.4.3.1, ''Adjusting NETACP Quotas with the NETACP$ Logical Names'' for more information on NETACP process quota requirements.
The final question asks if you want the network started automatically. If you have registered the DECnet for OpenVMS Product Authorization Key (PAK) and the current BYTLM quota is adequate, answer YES. If you have have not yet registered the DECnet for OpenVMS, answer NO. Register the PAK and start up the network manually by entering the following command:
$ @SYS$MANAGER:STARTNET
After the permanent database is established, you can use NCP commands to alter the parameters to correspond more closely to your configuration requirements.
If you use NETCONFIG.COM to establish the configuration database for a system that will be using only DDCMP asynchronous lines (for example, a MicroVAX system with a terminal line), NETCONFIG.COM does not configure the asynchronous DDCMP circuit and line parameters automatically. Instead, NETCONFIG.COM displays a message indicating that no circuits or lines have been configured. Set up the asynchronous lines separately (see Section 5.2.3.2, ''Running DECnet over Terminal Lines'').
Also, NETCONFIG.COM does not set up CI circuits.
To ensure that the configuration is successful, you can run the User Environment Test Package (UETP) to test DECnet. For a description of the test procedure, reference the appropriate OpenVMS upgrade and installation procedure manual for your processor.
5.2.2.1. NETCONFIG.COM Example
DECnet-VAX network configuration procedure This procedure will help you define the parameters needed to get DECnet running on this machine. You will be shown the changes before they are actually executed, in case you wish to perform them manually.
What do you want your DECnet node name to be? : CHCAGO What do you want your DECnet address to be? : 2.3 Do you want to operate as a router? [NO (nonrouting)]: RET Do you want a default DECnet account? [NO]: RET Do you want a default account for the MAIL object? [YES]: RET Do you want a default account for the FAL object? [NO]: RET Do you want a default account for the PHONE object? [YES]: RET Do you want a default account for the NML object? [YES]: RET Do you want a default account for the MIRROR object? [YES]: RET Do you want a default account for the VPM object? [YES]: RET
Here are the commands necessary to set up your system.
___________________________________
$ RUN SYS$SYSTEM:NCP
PURGE EXECUTOR ALL
PURGE KNOWN LINES ALL
PURGE KNOWN CIRCUITS ALL
PURGE KNOWN LOGGING ALL
PURGE KNOWN OBJECTS ALL
PURGE MODULE CONFIGURATOR KNOWN CIRCUITS ALL
$ DEFINE/USER SYS$OUTPUT NL:
$ DEFINE/USER SYS$ERROR NL:
$ RUN SYS$SYSTEM:NCP ! Remove existing entry, if any
PURGE NODE 2.3 ALL
PURGE NODE CHCAGO ALL
$ RUN SYS$SYSTEM:NCP
DEFINE EXECUTOR ADDRESS 2.3 STATE ON
DEFINE EXECUTOR NAME CHCAGO
DEFINE EXECUTOR MAXIMUM ADDRESS 1023
DEFINE EXECUTOR TYPE NONROUTING IV
DEFINE OBJECT TASK NUMBER 0 USER ILLEGAL PASSWORD DISABLED
DEFINE OBJECT MAIL NUMBER 27 USER MAIL$SERVER PASSWORD yadnifaj
$ RUN SYS$SYSTEM:AUTHORIZE
ADD MAIL$SERVER /OWNER="MAIL$SERVER DEFAULT" -
/PASSWORD=yadnifaj -
/UIC=[376,374] /ACCOUNT=DECNET -
/DEVICE=SYS$SPECIFIC: /DIRECTORY=[MAIL$SERVER] -
/PRIVILEGE=(TMPMBX,NETMBX) -
/DEFPRIVILEGE=(TMPMBX,NETMBX) -
/FLAGS=(RESTRICTED,NODISUSER) /LGICMD=NL: -
/NOBATCH /NOINTERACTIVE
MODIFY MAIL$SERVER /PASSWORD=yadnifaj
$ CREATE/DIRECTORY SYS$SPECIFIC:[MAIL$SERVER] /OWNER=[376,374]
$ RUN SYS$SYSTEM:NCP
DEFINE OBJECT PHONE NUMBER 29 USER PHONE$SERVER PASSWORD dogbasow
$ RUN SYS$SYSTEM:AUTHORIZE
ADD PHONE$SERVER /OWNER="PHONE$SERVER DEFAULT" -
/PASSWORD=dogbasow -
/UIC=[376,372] /ACCOUNT=DECNET -
/DEVICE=SYS$SPECIFIC: /DIRECTORY=[PHONE$SERVER] -
/PRIVILEGE=(TMPMBX,NETMBX) -
/DEFPRIVILEGE=(TMPMBX,NETMBX) -
/FLAGS=(RESTRICTED,NODISUSER) /LGICMD=NL: -
/NOBATCH /NOINTERACTIVE
MODIFY PHONE$SERVER /PASSWORD=dogbasow
$ CREATE/DIRECTORY SYS$SPECIFIC:[PHONE$SERVER] /OWNER=[376,372]
$ RUN SYS$SYSTEM:NCP
DEFINE OBJECT NML NUMBER 19 USER NML$SERVER PASSWORD kenrooka
$ RUN SYS$SYSTEM:AUTHORIZE
ADD NML$SERVER /OWNER="NML$SERVER DEFAULT" -
/PASSWORD=kenrooka -
/UIC=[376,371] /ACCOUNT=DECNET -
/DEVICE=SYS$SPECIFIC: /DIRECTORY=[NML$SERVER] -
/PRIVILEGE=(TMPMBX,NETMBX) -
/DEFPRIVILEGE=(TMPMBX,NETMBX) -
/FLAGS=(RESTRICTED,NODISUSER) /LGICMD=NL: -
/NOBATCH /NOINTERACTIVE
MODIFY NML$SERVER /PASSWORD=kenrooka
$ CREATE/DIRECTORY SYS$SPECIFIC:[NML$SERVER] /OWNER=[376,371]
$ RUN SYS$SYSTEM:NCP
DEFINE OBJECT MIRROR NUMBER 25 USER MIRRO$SERVER PASSWORD ewxgamula
$ RUN SYS$SYSTEM:AUTHORIZE
ADD MIRRO$SERVER /OWNER="MIRRO$SERVER DEFAULT" -
/PASSWORD=ewxgamula -
/UIC=[376,367] /ACCOUNT=DECNET -
/DEVICE=SYS$SPECIFIC: /DIRECTORY=[MIRRO$SERVER] -
/PRIVILEGE=(TMPMBX,NETMBX) -
/DEFPRIVILEGE=(TMPMBX,NETMBX) -
/FLAGS=(RESTRICTED,NODISUSER) /LGICMD=NL: -
/NOBATCH /NOINTERACTIVE
MODIFY MIRRO$SERVER /PASSWORD=ewxgamula
$ CREATE/DIRECTORY SYS$SPECIFIC:[MIRRO$SERVER] /OWNER=[376,367]
$ RUN SYS$SYSTEM:NCP
DEFINE OBJECT VPM NUMBER 51 USER VPM$SERVER PASSWORD galesobu
$ RUN SYS$SYSTEM:AUTHORIZE
ADD VPM$SERVER /OWNER="VPM$SERVER DEFAULT" -
/PASSWORD=galesobu -
/UIC=[376,370] /ACCOUNT=DECNET -
/DEVICE=SYS$SPECIFIC: /DIRECTORY=[VPM$SERVER] -
/PRIVILEGE=(TMPMBX,NETMBX) -
/DEFPRIVILEGE=(TMPMBX,NETMBX) -
/FLAGS=(RESTRICTED,NODISUSER) /LGICMD=NL: -
/NOBATCH /NOINTERACTIVE
MODIFY VPM$SERVER /PASSWORD=galesobu
$ CREATE/DIRECTORY SYS$SPECIFIC:[VPM$SERVER] /OWNER=[376,370]
$ RUN SYS$SYSTEM:NCP
DEFINE LINE
UNA-0 STATE ON
DEFINE CIRCUIT UNA-0 STATE ON COST 3
DEFINE LINE
DMC-0 STATE ON
DEFINE CIRCUIT DMC-0 STATE ON COST 5
DEFINE LOGGING MONITOR STATE ON
DEFINE LOGGING MONITOR EVENTS 0.0-9
DEFINE LOGGING MONITOR EVENTS 2.0-1
DEFINE LOGGING MONITOR EVENTS 4.2-13,15-16,18-19
DEFINE LOGGING MONITOR EVENTS 5.0-18
DEFINE LOGGING MONITOR EVENTS 128.0-4
___________________________________Do you want these commands to be executed? [YES]:RET The changes have been made. If you have not already registered the DECnet-VAX key, then do so now. After the key has been registered, you should invoke the procedure SYS$MANAGER:STARTNET.COM to start up DECnet-VAX with these changes. (If the key is already registered) Do you want DECnet started?[YES]:RET
5.2.2.2. NETCONFIG_UPDATE.COM for Existing Network Configurations
Unlike NETCONFIG.COM, NETCONFIG_UPDATE.COM configures only default access control. It performs no other network configuration. Therefore, when you use NETCONFIG_UPDATE.COM to specify changes to default access control information, everything else in the configuration database remains unchanged.
The NETCONFIG_UPDATE.COM procedure resides in SYS$UPDATE. The SYSPRV and OPER privileges are required to run NETCONFIG_UPDATE.COM.
Like NETCONFIG.COM, NETCONFIG_UPDATE.COM generates passwords for each account that you create and for existing default accounts in your configuration database. For example, if you currently have a default account for MAIL, NETCONFIG_UPDATE.COM generates a new password for it and replaces the existing password with the new one. You never need to write down or memorize the default account’s system-generated password. The password is recorded in that account’s user authorization file (UAF) record and then added to that object’s definition in the permanent database.
If you choose not to immediately execute the commands generated by NETCONFIG_UPDATE.COM, these commands will be written to a SYS$MANAGER:UPDATE_NODEINFO.COM file so you can execute them later. NETCONFIG_UPDATE.COM provides a secondary procedure for updating the default access of the databases of nodes that are VMScluster members. When you run NETCONFIG_UPDATE.COM on one node that is a member of a cluster, the procedure detects that it is a cluster member and instructs you to run SYS$COMMON:[SYSMGR]UPDATE_CLUSTER_MEMBERS.COM on the other cluster members. This secondary procedure will modify the default access of each cluster member exactly as you modified that of the first member.
$ RUN SYS$SYSTEM:SYSMAN SYSMAN> SET ENVIRONMENT/CLUSTER/USER=SYSTEM Remote Password:
%SYSMAN-I-ENV, current command environment:
Clusterwide on local cluster
Username SYSTEM will be used on nonlocal nodesSYSMAN> DO @SYS$COMMON:[SYSMGR]UPDATE_CLUSTER_MEMBERS.COM SYSMAN> EXIT $
See the VSI OpenVMS System Management Utilities Reference Manual for details on SYSMAN. You need OPER privilege to run SYSMAN.
Note
When you no longer need them, delete any SYS$MANAGER:UPDATE_CLUSTER_MEMBERS.COM or SYS$MANAGER:UPDATE_NODEINFO.COM files created by NETCONFIG_UPDATE.COM. These files contain password and account information which may present a security risk.
5.2.3. Tailoring the Configuration Database
You can configure the network using individual NCP commands. Examples of various configuration procedures are given in Section 5.3, ''Network Configuration Examples''. You can also use NCP to add or delete entries in an existing permanent database.
Running DECnet over the CI. The driver CNDRIVER must be loaded on the system and all CI lines and circuits must be defined in the configuration database.
Running DECnet over terminal lines. The terminal driver, NODRIVER, must be loaded on the system, terminal lines must be converted to DDCMP lines, and all DDCMP lines and circuits must be defined in the configuration database.
The procedures for handling these changes are described in detail in the following sections.
5.2.3.1. Running DECnet over the CI
$ RUN SYS$SYSTEM:SYSGEN CONNECT CNA0/NOADAPTER
$ RUN SYS$SYSTEM:NCP NCP>DEFINE LINE CI-0 STATE ON NCP>DEFINE CIRCUIT CI-0.0 TRIBUTARY 0 STATE ON NCP>DEFINE CIRCUIT CI-0.1 TRIBUTARY 1 STATE ON ⋮ NCP>EXIT $
The previous example illustrates how to use NCP commands to define the CI line and one or more CI circuits in the permanent database.
5.2.3.2. Running DECnet over Terminal Lines
A static asynchronous DDCMP line: a line permanently configured as a DECnet line
A dynamic asynchronous DDCMP line: a line that is switched from terminal to DECnet use for the duration of a dialup call
Procedures for installing and shutting down each of these types of lines are described in Section 5.2.3.3, ''Installing Static Asynchronous Lines'' and Section 5.2.3.4, ''Installing Dynamic Asynchronous Lines''. The complete DECnet for OpenVMS installation procedure, including establishment of asynchronous connections, appears in the VSI OpenVMS DECnet Guide to Networking.
Because dialup lines are more prone to noise problems than dedicated synchronous lines, set the executor buffer size and segment buffer size to a value of 192 for any end node that is connected to its router by a dialup line. Use of a relatively small buffer size reduces the effect of buffer retransmission on overall throughput.
5.2.3.3. Installing Static Asynchronous Lines
On systems that support DDCMP, you perform the following steps when setting up and shutting down static asynchronous lines on your system.
Setting Up Static Asynchronous DDCMP Lines
- Load the asynchronous DDCMP driver NODRIVER by adding the following commands to the site-specific startup procedure in the SYS$MANAGER directory or by interactively specifying the commands after the system is booted.
$ RUN SYS$SYSTEM:SYSGEN SYSGEN> CONNECT NOA0/NOADAPTER
Choose the terminal lines on your system that you will use as DECnet lines. For each terminal line that you configure as a static asynchronous DDCMP line, modify the site-specific startup procedure in your SYS$MANAGER directory by adding the DCL command SET TERMINAL/PROTOCOL=DDCMP device-name before the command which invokes SYS$MANAGER:STARTNET.
For example, to convert the terminal lines connected to ports TTA0 and TXB7 on your system into DECnet lines with no modem control, add the following commands to the site-specific startup procedure:$ SET TERMINAL/PERMANENT/PROTOCOL=DDCMP/NOTYPE_AHEAD TTA0: $ SET TERMINAL/PERMANENT/PROTOCOL=DDCMP/NOTYPE_AHEAD TXB7:
To convert the line connected to terminal port TXA1 (which can be used as a dialup line) to a DECnet line with modem control, add the following command to SYSTARTUP_V5.COM:$ SET TERMINAL/PERMANENT/PROTOCOL=DDCMP/NOTYPE_AHEAD TTA0: $ SET TERMINAL/PERMANENT/PROTOCOL=DDCMP/NOTYPE_AHEAD TXB7:
To convert the line connected to terminal port TXA1 (which can be used as a dialup line) to a DECnet line with modem control, add the following command to the site-specific startup procedure:
$ SET TERMINAL/PERMANENT/MODEM/NOHANGUP/NOAUTOBAUD - _$ /NOTYPE_AHEAD/PROTOCOL=DDCMP TXA1:
While the terminal line is in use as a DECnet communications line, you can change the line speed by resetting the speed and line using NCP.
- Use NCP DEFINE commands to define all terminal lines and circuits in the permanent database, as shown in the following example:
$ RUN SYS$SYSTEM:NCP NCP>DEFINE LINE TT-0-0 STATE ON RECEIVE BUFFERS 4 - _ LINE SPEED 2400 NCP>DEFINE CIRCUIT TT-0-0 STATE ON NCP>DEFINE LINE TX-1-7 STATE ON RECEIVE BUFFERS 4 - _ LINE SPEED 2400 NCP>DEFINE CIRCUIT TX-1-7 STATE ON NCP>DEFINE LINE TX-0-1 STATE ON RECEIVE BUFFERS 4 - _ LINE SPEED 2400 NCP>DEFINE CIRCUIT TX-0-1 STATE ON NCP>EXIT $
Your changes will take effect when you restart DECnet. To change the volatile database, repeat the commands above, using SET rather than DEFINE.
Reasons for Failure of Static Asynchronous Connections
The line speeds at both ends of the connection must be set to the same value.
If you are using a dialup line, the modem characteristic must be set on the terminal before the line is used for asynchronous DDCMP.
If the network is divided into areas, the two nodes being connected must be in the same area or must be area routers.
Asynchronous DECnet requires the parity on the asynchronous line to be set to NONE and the terminal line to be set up to use 8-bit characters. If you are using a non-VMS system, you must check that the terminal line is set to the correct parity.
If data is stored in a type-ahead buffer associated with your terminal line, the line comes up as a terminal line even if a startup command procedure attempts to set it up as a DDCMP line. This generally occurs when the remote node is running and its asynchronous DDCMP line is on. The DDCMP start messages being transmitted are stored in the type-ahead buffer for your line. Before you can start up your terminal line in DDCMP mode, you must terminate the process that has started and that owns your terminal line.
For local connections, verify that the cable is a null modem cable.
For modem connections, verify that the cable is a straight-through cable and that if the modem is put in analog loopback, the circuit comes up with the local node as the adjacent node.
For both types of connections, verify that the port is operational by resetting the port to terminal-type characteristics and plugging in a terminal and logging in.
If your connection is timing out or losing DDCMP packets, it may be that you do not have a sufficient number of receive buffers for the asynchronous line. To verify and correct this problem, see Section 3.6.3.1, ''Line Buffers''.
Shutting Down Static Asynchronous DDCMP Lines
$ RUN SYS$SYSTEM:NCP NCP>SET LINE TT-0-0 STATE OFF NCP>CLEAR LINE TT-0-0 ALL NCP>SET CIRCUIT TT-0-0 STATE OFF NCP>CLEAR CIRCUIT TT-0-0 ALL
$ SET TERMINAL/PROTOCOL=NONE TTA0:
$ SET TERMINAL/PERMANENT/MODEM/AUTOBAUD/TYPEAHEAD - _$ /PROTOCOL=NONE TXA1:
5.2.3.4. Installing Dynamic Asynchronous Lines
On systems that support DDCMP, to make a temporary connection to another node over an asynchronous connection (for example, a telephone line), the terminal lines at each node may be switched to dynamic asynchronous DDCMP lines for the duration of the connection. The procedure for establishing a dynamic connection, reasons why the connection might fail, and the actions that shut down the lines are described next. Dynamic switching is described in detail in Chapter 2, "DECnet for OpenVMS Components and Concepts".
Setting Up and Switching Dynamic Asynchronous DDCMP Lines
- The system manager at each node must load the asynchronous DDCMP driver NODRIVER by adding the following commands to the SYSTARTUP_V5.COM command procedure in the SYS$MANAGER directory or by specifying the commands after the system is booted.
$ RUN SYS$SYSTEM:SYSGEN SYSGEN> CONNECT NOA0/NOADAPTER
- The system manager at each node must install the shareable image DYNSWITCH, as follows:
$ INSTALL INSTALL> CREATE SYS$LIBRARY:DYNSWITCH/SHARE - _ /PROTECT/HEADER/OPEN INSTALL> EXIT
Note that DYNSWITCH is a DECnet for OpenVMS image only. If the image DYNSWITCH is not installed on the remote system, dynamic switching of lines is implicitly disabled.
- The system manager at the remote node, OXYGEN, must enable the use of virtual terminals with these commands:
$ RUN SYS$SYSTEM:SYSGEN SYSGEN> CONNECT VTA0/NOADAPTER/DRIVER=TTDRIVER
The system manager on the remote system must also enable the disconnect option for the terminal port to be used by specifying the following command for the terminal:$ SET TERMINAL/PERMANENT/MODEM/DISCONNECT TTB1:
- For security, the user at the local node HELIUM must define in the node database the transmit password to be sent to remote node OXYGEN. For example:
$ RUN SYS$SYSTEM:NCP NCP>DEFINE NODE BIGVAX TRANSMIT PASSWORD password
The system manager at remote node OXYGEN must define node HELIUM in the node database with the appropriate receive password and INBOUND type (router or end node). For example:$ RUN SYS$SYSTEM:NCP NCP>DEFINE NODE HELIUM INBOUND ENDNODE - _ RECEIVE PASSWORD password
Figure 5.1, ''Dynamic Switching of Asynchronous DDCMP Lines'' illustrates dynamic asynchronous switching occuring over a dialup line. The local node in Figure 5–1 is a standalone MicroVAX II system; the remote node is a VAX–11/780. After the user at the local node dials in to the remote node, he or she can cause the lines connected to terminal ports TTA1 and TXB1 to be switched to dynamic asynchronous DDCMP lines for use in DECnet communications.
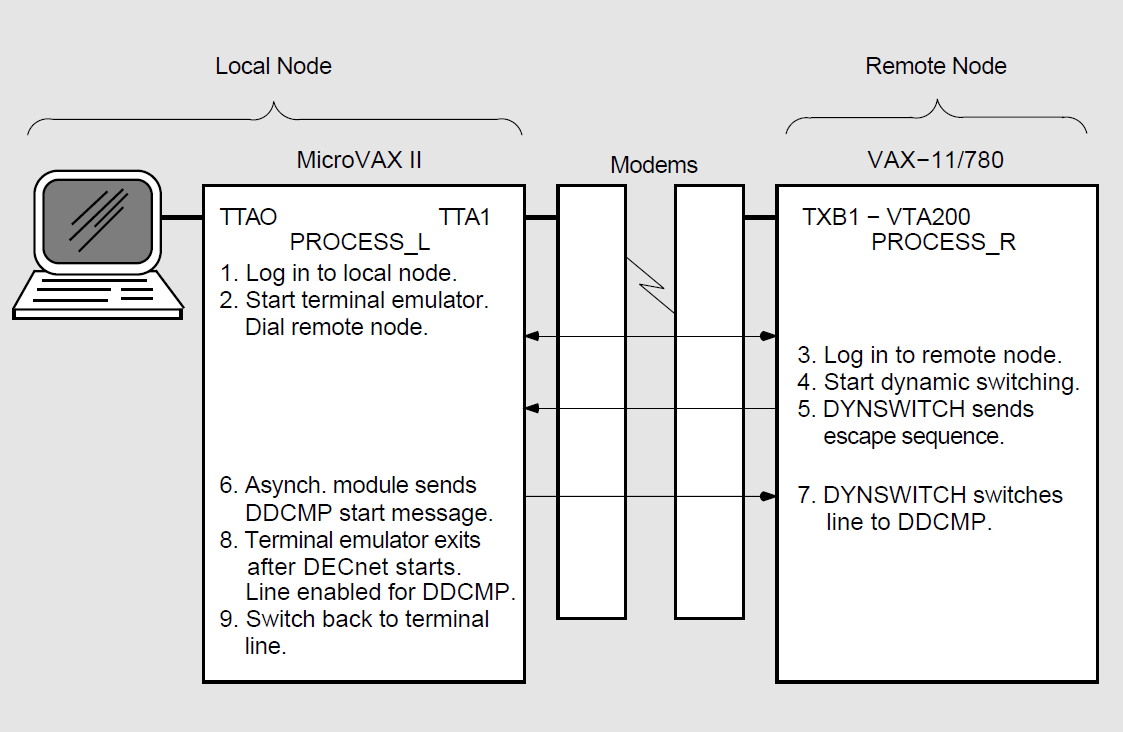
The following steps illustrate how to switch lines connected to terminal ports to dynamic asynchronous DECnet lines, as illustrated in Figure 5.1, ''Dynamic Switching of Asynchronous DDCMP Lines''.
Log in to the operating system running on the MicroVAX II, causing a process to be created on your system. In Figure 5.1, ''Dynamic Switching of Asynchronous DDCMP Lines'', this process is identified by the sample process name PROCESS_L.
To start the terminal emulator, enter the following DCL command:
$ SET HOST/DTE[/DIAL=NUMBER:number] TTA1:
This command causes a process on the local system to function as a terminal emulator, and causes the modem to dial the number of the remote system.
The terminal emulator permits the local process to function as though it were a terminal line: characters can be read from one port and written to another port.
If you do not specify the /DIAL qualifier, dial the remote system manually.
For details about the SET HOST/DTE command, see the VSI OpenVMS DCL Dictionary.
In Figure 5.1, ''Dynamic Switching of Asynchronous DDCMP Lines'', the terminal emulator on the MicroVAX II transfers characters between ports TTA0 and TTA1. The /DIAL qualifier in the SET HOST/DTE command is optional and works only if you have a program to dial your modem. The default program supplied with the operating system dials a DF03 modem.
After the dialup connection is made and you receive the remote system welcome message, perform the regular procedure for logging in to your account on the remote node. In this case, you would supply your user id and password to the remote operating system.
When you log in over a modem line, a process is created at the remote node and connected to a virtual terminal as well as the physical terminal. In Figure 5.1, ''Dynamic Switching of Asynchronous DDCMP Lines'', this process is identified by the sample process name PROCESS_R. The virtual terminal permits PROCESS_R to continue running even if the physical terminal is disconnected (for example, if you lose the carrier signal on your telephone line).
You can then initiate dynamic switching by specifying the following DCL command from your account on the remote node:
$ SET TERMINAL/PROTOCOL=DDCMP/SWITCH=DECNET
The SET TERMINAL command is an OpenVMS DCL command. If you are not on an OpenVMS node, specify the equivalent function for your system.
If the terminal emulator does not recognize escape sequences (if the local node is not an OpenVMS operating system), specify the /MANUAL qualifier in the SET TERMINAL command.
$ SET TERMINAL/MANUAL/PROTOCOL=DDCMP/SWITCH=DECNET
The /MANUAL qualifier prevents DYNSWITCH at the remote node from sending the escape sequence. Instead, DYNSWITCH sends the following message to the local node:
%SET-I-SWINPRG, The line you are currently logged in over is becoming a DECnet line
After receiving this message, if you decide not to switch the line, you can press Ctrl/C or Ctrl/Y to abort the switch. If your local system is a VAX and you want to continue the switch, exit the terminal emulator and switch your terminal line to an asynchronous DDCMP line manually by entering the following command:
$ SET TERMINAL/PROTOCOL=DDCMP TTA1:
Then, you enter NCP commands to turn on your line and circuit. For example, enter the following commands:
NCP>SET CIRCUIT TT-0-1 STATE ON NCP>SET LINE TT-0-1 STATE ON
DYNSWITCH waits 60 seconds for the DDCMP start message and the transmit password and then times out the switch.
The SET TERMINAL command is an OpenVMS DCL command. If you are not on an OpenVMS node, specify the equivalent function for your system.
When the SET image at the remote node recognizes the /SWITCH=DECNET qualifier, it calls the shareable image DYNSWITCH. DYNSWITCH verifies that the device is a virtual terminal and then sends an escape sequence to the terminal emulator running on the MicroVAX II. The escape sequence notifies the terminal emulator that the line connected to the remote terminal port is becoming an asynchronous DDCMP line.
When the terminal emulator at the local node receives the escape sequence, it calls the image DYNSWITCH, which causes the line connected to terminal port TTA1 to be switched to an asynchronous DDCMP line. It assigns a channel to the network and supplies the appropriate line and circuit entries to the NCP volatile database at the local node. (The modem line is not dropped; redialing is not required.)
The asynchronous DDCMP software module on the local node sends a DDCMP start message to DYNSWITCH on the remote node and sends the transmit password defined in the local node database.
DYNSWITCH at the remote node disconnects the physical terminal from the virtual terminal, and causes the line connected to the physical terminal port (in Figure 5.1, ''Dynamic Switching of Asynchronous DDCMP Lines'', the port TXB1) to be converted to an asynchronous DDCMP line. DYNSWITCH assigns a channel to the network and supplies the appropriate line and circuit parameters to the volatile database to start up the line and circuit.
After DECnet is started on the local node, the terminal emulator is exited.
When control is returned to the local node, the following message is displayed:
%REM-S-END, control returned to node _local-node-name::
A prompt appears on the local terminal and you can then use DECnet to perform operations over the network.
When you hang up the telephone, the line is switched back to a terminal line.
(DECnet automatically clears the line and circuit entries from the volatile database). Alternatively, you can switch the asynchronous line back to a terminal line by issuing an NCP command to turn off the line or circuit. To prevent the modem signal from dropping when you turn off the DECnet line in NCP, specify the /NOHANGUP qualifier in the SET TERMINAL command. If you use this qualifier, you need not redial the connection to the remote node when you want to convert your line to DECnet use.
Chapter 3, "Managing and Monitoring the Network" describes the NCP command parameters required for asynchronous connections. Section 2.8, ''Network Access Control'' summarizes security for dynamic asynchronous connections.
Reasons for Failure of Dynamic Asynchronous Connections
DECnet must be started on both nodes.
The asynchronous DDCMP class driver (NODRIVER) must be loaded by means of SYS$SYSTEM:SYSGEN at each node.
The dynamic switch image (DYNSWITCH) must be installed by means of SYS$SYSTEM:INSTALL at each VMS node.
Virtual terminals must be enabled both on the remote node and, in particular, for the terminal at which you are logged in. The terminal line at the remote node must have the attribute DISCONNECT set.
After you enter a SET TERMINAL command with the /MANUAL qualifier, you must specify NCP commands to turn on the DECnet line within approximately four minutes or the line returns to terminal mode.
If the network is divided into areas, the two nodes being connected must be in the same area or must be area routers.
The routing initialization passwords on each node must be set correctly (see Section 3.11.1, ''Specifying Passwords for Routing Initialization'').
The INBOUND parameter for the local node entry must be set correctly in the node database at the remote node (see Section 3.11.3, ''Node-Level Access Control Commands'').
Asynchronous DECnet requires the parity on the asynchronous line to be set to NONE and the terminal line to be set up to use 8-bit characters. If you are using a non-VMS system, you must check that the terminal line is set to the correct parity.
Shutting Down Dynamic Asynchronous Lines
Break the telephone connection.
- Enter one of the following NCP commands (either command causes both line and circuit entries to be cleared in the database):
NCP>SET LINE TT-0-0 STATE OFF NCP>SET CIRCUIT TT-0-0 STATE OFF
The results of these commands vary depending on the side of the connection from which they are entered. If the command is entered at the local (originating) node, the port is immediately switched to the terminal driver. On the other side (the remote node), the line remains in the ON-STARTING state for approximately four minutes and then is switched to the terminal port. If the line or circuit is stopped by the remote node, the line and circuit on both sides of the connection immediately return to terminal mode.
Note that, if you specify the /NOHANGUP qualifier in the SET TERMINAL command with which you initiate dynamic switching, the modem carrier signal is not dropped when you shut down the DECnet line or circuit. The carrier signal is broken when you hang up the telephone.
If you specify the SET TERMINAL command with the /MANUAL qualifier to switch the terminal line manually, you can abort the switch by pressing CTRL/C or CTRL/Y.
5.3. Network Configuration Examples
This section discusses how you can use NCP commands to build your network configuration in the permanent database. The following table lists the network configuration examples and the sections in which they appear:
| Network Configuration Example | Section |
| Ethernet Network Example | Section 5.3.1, ''Ethernet Network Example'' |
| FDDI Network Example Section | Section 5.3.2, ''FDDI Network Example'' |
| ?Synchronous DDCMP Point-to-Point | Section 5.3.3, ''Synchronous DDCMP Point-to-Point Network Example'' |
| ?DDCMP Multipoint | Section 5.3.4, ''DDCMP Multipoint Network Example'' |
| ?Static Asynchronous DDCMP | Section 5.3.5, ''Static Asynchronous DDCMP Network Example'' |
| ?Dynamic Asynchronous DDCMP | Section 5.3.6, ''Dynamic Asynchronous DDCMP Network Example'' |
Assume that these configuration examples are single-area networks using the default area 1. Figure 5.2, ''An Ethernet Network Configuration'' through Figure 5.7, ''A Dynamic Asynchronous DDCMP Network Configuration'' correspond to the examples shown in each of the respective sections.
Combine the appropriate NCP commands in a command file that reflects your network configuration; then edit and run this procedure as many times as necessary to properly build the permanent database corresponding to your configuration and needs. After you configure the permanent database, invoke SYS$MANAGER:STARTNET.COM to load these parameters into the volatile database, and to bring up the network.
5.3.1. Ethernet Network Example
The example in this section shows how to build a database for a network configuration of three nodes connected by an Ethernet UNA line and circuit, as depicted in Figure 5.2, ''An Ethernet Network Configuration''. The NCP commands in this example configure the database for node ROBIN. Repeat the procedure to configure the databases for nodes THRUSH and LARK.
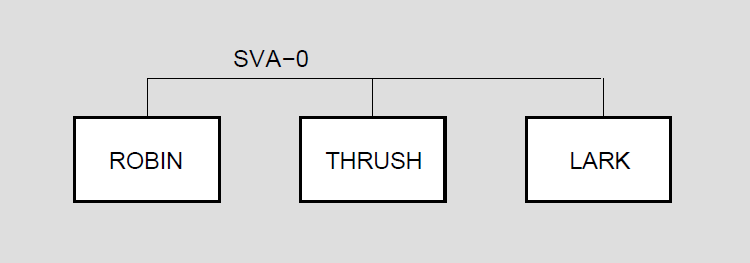
! Define executor-specific parameters for local node ROBIN. ! DEFINE EXECUTOR ADDRESS 20 - BUFFER SIZE 576 - STATE ON TYPE NONROUTING IV ! ! Define common node parameters for the local node. Be sure ! to add the NETNONPRIV user to your system authorization ! file by using the Authorize utility. ! DEFINE EXECUTOR NAME ROBIN - NONPRIVILEGED - USER NETNONPRIV - PASSWORD NONPRIV ! ! Define the remaining nodes. No default outbound ! access control information is specified. This assumes that ! the default access control information will be supplied by ! each remote node when it receives an inbound connect request. ! DEFINE NODE 21 NAME THRUSH DEFINE NODE 22 NAME LARK ! ! Define parameters for line/circuit SVA-0. ! DEFINE LINE SVA-0 STATE ON DEFINE CIRCUIT SVA-0 STATE ON ! ! The object database does not need to be defined because it defaults ! to the standard list of objects known to the operating system. ! ! ! Define transmitter-related logging parameters. ! DEFINE LOGGING MONITOR KNOWN EVENTS ! ! Define receiver-related logging parameters. ! DEFINE LOGGING MONITOR STATE ON
5.3.2. FDDI Network Example
The example in this section shows how to build a database for node SWAN which is in a network configuration of three nodes connected by an FDDI MFA line and circuit, as depicted in Figure 5.3, ''An FDDI Network Configuration''. The NCP commands in this example configure the database for node SWAN. Repeat the procedure to configure the databases for nodes DOVE and ORIOLE.
! ! Define executor-specific parameters for local node SWAN. ! DEFINE EXECUTOR ADDRESS 20 - BUFFER SIZE 576 - STATE ON TYPE NONROUTING IV ! ! Define common node parameters for the local node. Be sure ! to add the NETNONPRIV user to your system authorization ! file by using the Authorize utility. !
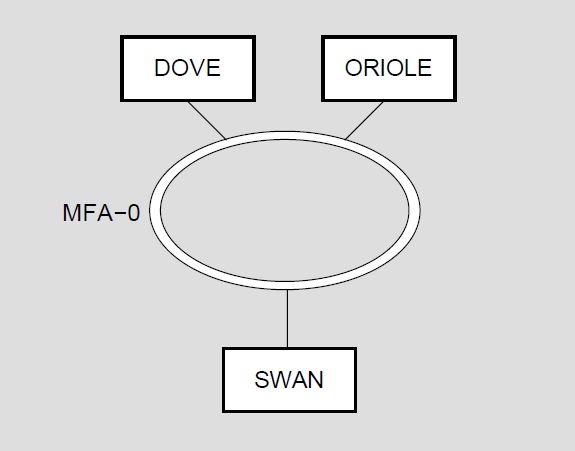
DEFINE EXECUTOR NAME SWAN - NONPRIVILEGED - USER NETNONPRIV - PASSWORD NONPRIV ! ! Define the remaining nodes. No default outbound ! access control information is specified. This assumes that ! the default access control information will be supplied by ! each remote node when it receives an inbound connect request. ! DEFINE NODE 21 NAME DOVE DEFINE NODE 22 NAME ORIOLE ! ! Define parameters for line/circuit MFA-0. ! DEFINE LINE MFA-0 STATE ON DEFINE CIRCUIT MFA-0 STATE ON ! ! The object database does not need to be defined because it defaults ! to the standard list of objects known to the operating system. ! ! ! Define transmitter-related logging parameters. ! DEFINE LOGGING MONITOR KNOWN EVENTS ! ! Define receiver-related logging parameters. ! DEFINE LOGGING MONITOR STATE ON
5.3.3. Synchronous DDCMP Point-to-Point Network Example
The example in this section shows how to build a database for a network configuration of four nodes connected by a DMC11, DMP11, or DMF32 line and circuit, as depicted in Figure 5.4, ''A Synchronous DDCMP Point-to-Point Network Configuration''. The NCP commands in this example configure the DDCMP point-to-point network. Note that node NEWARK is a nonrouting RSX–11S system to which node CHCAGO will perform a downline load.
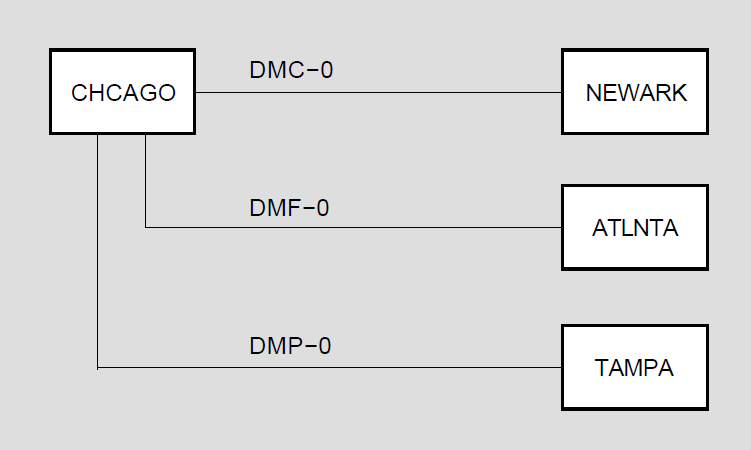
! ! Define executor-specific parameters for local node CHCAGO. ! DEFINE EXECUTOR ADDRESS 1 - BUFFER SIZE 576 - MAXIMUM HOPS 6 - MAXIMUM VISITS 12 - STATE ON TYPE ROUTING IV ! ! Define common node parameters for the local node. Be sure ! to add the NETNONPRIV user to your system authorization ! file by using the Authorize utility. ! DEFINE EXECUTOR NAME CHCAGO - NONPRIVILEGED - USER NETNONPRIV - PASSWORD NONPRIV ! ! Define parameters for remote node NEWARK (a nonrouting ! RSX-11S system). CHCAGO will be the load host for NEWARK. ! DEFINE NODE 2 NAME NEWARK - HOST NODE CHCAGO - LOAD FILE NOD11S.SYS - NONPRIVILEGED - USER NETNONPRIV - PASSWORD NONPRIV - SERVICE CIRCUIT DMC-0 - SERVICE PASSWORD FE - SECONDARY LOADER SECDMC.SYS - TERTIARY LOADER TERDMC.SYS ! ! Define the remaining nodes. ! DEFINE NODE 3 NAME ATLNTA DEFINE NODE 4 NAME TAMPA ! ! Define parameters for line/circuit DMC-0 to node NEWARK. ! ! Because this node will be loaded downline, the service ! parameters must be set up. ! DEFINE LINE DMC-0 PROTOCOL DDCMP POINT - SERVICE TIMER 4000 - STATE ON DEFINE CIRCUIT DMC-0 SERVICE ENABLED - STATE ON ! ! Define parameters for line/circuit DMF-0 to node ATLNTA. ! ! (Give this line more receive buffers because it has a faster ! connection.) ! DEFINE LINE DMF-0 PROTOCOL DDCMP POINT - RECEIVE BUFFERS 8 - STATE ON DEFINE CIRCUIT DMF-0 STATE ON ! ! Define parameters for line/circuit DMP-0 to node TAMPA. ! DEFINE LINE DMP-0 PROTOCOL DDCMP POINT - STATE ON DEFINE CIRCUIT DMP-0 STATE ON ! ! The object database does not need to be defined because it defaults ! to the standard list of objects known to the operating system. ! ! ! Define transmitter-related logging parameters. ! DEFINE LOGGING MONITOR KNOWN EVENTS ! ! Define receiver-related logging parameters. ! DEFINE LOGGING MONITOR STATE ON
5.3.4. DDCMP Multipoint Network Example
The example in this section shows how to build a database for a network configuration of five nodes connected by a combination of DMC, DMF, and DMP lines and circuits, as depicted in Figure 5.5, ''A DDCMP Multipoint Network Configuration''. The NCP commands in this example configure the DDCMP multipoint network.
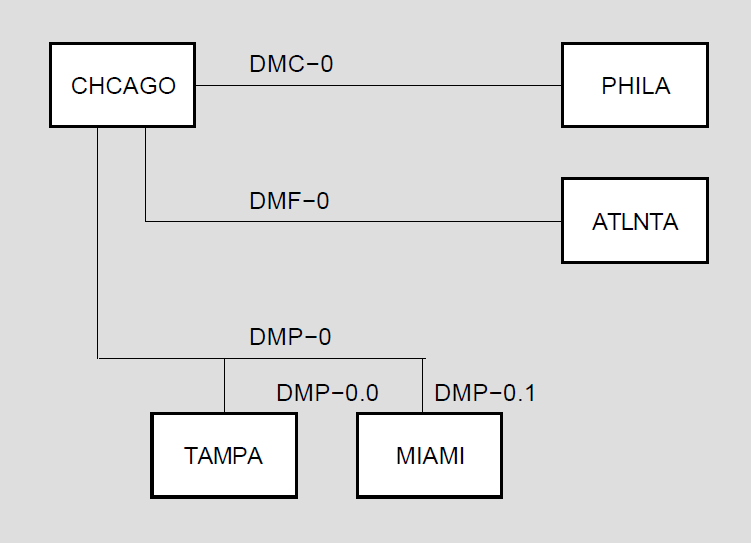
! ! Define executor-specific parameters for local node CHCAGO. ! DEFINE EXECUTOR ADDRESS 1 - BUFFER SIZE 576 - MAXIMUM HOPS 6 - MAXIMUM VISITS 12 - STATE ON TYPE ROUTING IV ! ! Define common node parameters for the local node. Be sure ! to add the NETNONPRIV user to your system authorization ! file by using the Authorize utility. ! DEFINE EXECUTOR NAME CHCAGO - NONPRIVILEGED - USER NETNONPRIV - PASSWORD NONPRIV ! ! Define the remaining nodes. No default outbound ! access control information is specified. This assumes that ! the default access control information will be supplied by ! each remote node when it receives an inbound connect request. ! DEFINE NODE 2 NAME PHILA DEFINE NODE 3 NAME ATLNTA DEFINE NODE 4 NAME TAMPA DEFINE NODE 5 NAME MIAMI ! ! Define parameters for line/circuit DMC-0 to node PHILA. ! DEFINE LINE DMC-0 PROTOCOL DDCMP POINT - STATE ON DEFINE CIRCUIT DMC-0 STATE ON ! ! Define parameters for line/circuit DMF-0 to node ATLNTA. ! DEFINE LINE DMF-0 PROTOCOL DDCMP POINT - STATE ON DEFINE CIRCUIT DMF-0 STATE ON ! ! Define parameters for line DMP-0 and circuits to nodes TAMPA ! and MIAMI. ! ! TAMPA is connected as tributary 3, DMP-0.0 ! MIAMI is connected as tributary 4, DMP-0.1 ! ! The DMP line runs at 56,000 bits per second. The proper ! setting for the retransmit timer is ! ! 20,000 * buffer_size ! retransmit timer = -------------------- ! bps ! ! Thus, with a buffer size of 576, the retransmit timer should ! be 210 milliseconds. ! ! The dead timer is set to 30 seconds to avoid excessive delays ! when polling dead tributaries. The timer is set when a node ! goes down. ! DEFINE LINE DMP-0 PROTOCOL DDCMP CONTROL - DEAD TIMER 30000 - RECEIVE BUFFERS 6 - RETRANSMIT TIMER 210 - STATE ON DEFINE CIRCUIT DMP-0.0 COST 4 - STATE ON - TRIBUTARY 3 DEFINE CIRCUIT DMP-0.1 COST 4 - STATE ON - TRIBUTARY 4 ! ! The object database does not need to be defined because it defaults ! to the standard list of objects known to the operating system. ! ! ! Define transmitter-related logging parameters. ! DEFINE LOGGING MONITOR KNOWN EVENTS ! ! Define receiver-related logging parameters. ! DEFINE LOGGING MONITOR STATE ON
5.3.5. Static Asynchronous DDCMP Network Example
The example in this section shows how to build a database for a network configuration of four nodes connected by a DMR11 line and two terminal lines converted to static asynchronous DECnet lines, as depicted in Figure 5.6, ''A Static Asynchronous DDCMP Network Configuration''.
The NCP commands in this example configure the DDCMP point-to-point network that includes static asynchronous lines. To establish the static asynchronous connections, nodes YELLOW and BLUE must also specify in their configuration databases the circuits and lines connecting them to node CHCAGO. Before entering these commands, you should setup the terminal line with the appropriate characteristics (see Section 5.2.3.3, ''Installing Static Asynchronous Lines'').
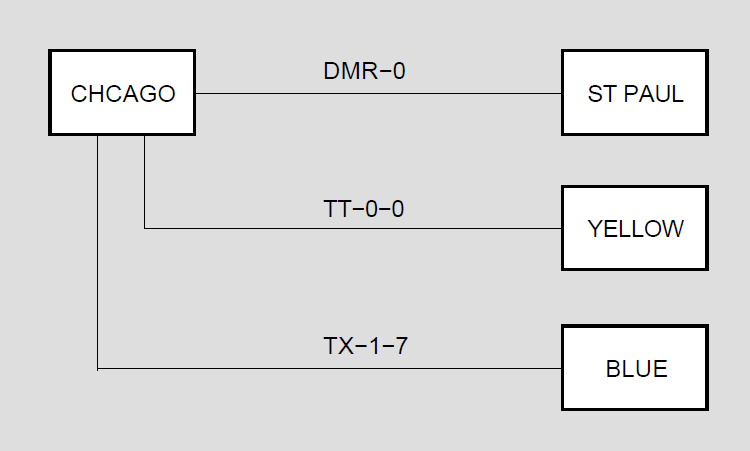
! ! Define executor-specific parameters for local node CHCAGO. ! DEFINE EXECUTOR ADDRESS 1 - BUFFER SIZE 576 - MAXIMUM HOPS 6 - MAXIMUM VISITS 12 - STATE ON TYPE ROUTING IV ! ! Define common node parameters for the local node. Be ! sure to add the NETNONPRIV user to your system ! authorization file by using the Authorize utility. ! DEFINE EXECUTOR NAME CHCAGO - NONPRIVILEGED - USER NETNONPRIV - PASSWORD NONPRIV ! ! Define the remaining nodes. No default ! outbound access control information is specified. ! This assumes that the default access control ! information will be supplied by each remote node ! when it receives an inbound connect request. ! DEFINE NODE 2 NAME STPAUL DEFINE NODE 3 NAME YELLOW DEFINE NODE 4 NAME BLUE ! ! Define parameters for line/circuit DMR-0 to node ! STPAUL. ! DEFINE LINE DMR-0 PROTOCOL DDCMP POINT - STATE ON DEFINE CIRCUIT DMR-0 STATE ON ! ! Define parameters for line/circuit TT-0-0 to node ! YELLOW. ! DEFINE LINE TT-0-0 RECEIVE BUFFERS 4 - STATE ON - LINE SPEED 9600 DEFINE CIRCUIT TT-0-0 STATE ON ! ! Define parameters for line/circuit TX-1-7 to node ! BLUE. ! DEFINE LINE TX-1-7 RECEIVE BUFFERS 4 - STATE ON - LINE SPEED 1200 DEFINE CIRCUIT TX-1-7 STATE ON ! ! The object database does not need to be defined ! because it defaults to the standard list of objects ! known to the operating system. ! ! ! Define transmitter-related logging parameters. ! DEFINE LOGGING MONITOR KNOWN EVENTS ! ! Define receiver-related logging parameters. ! DEFINE LOGGING MONITOR STATE ON
5.3.6. Dynamic Asynchronous DDCMP Network Example
The examples in this section show how to configure two nodes connected by a terminal line converted to a dynamic asynchronous DECnet line.
The first example shows the NCP commands that configure the dynamic asynchronous DDCMP connection from node OXYGEN to node HELIUM; node OXYGEN is assumed to be a router.
The second example shows the NCP commands that configure the dynamic asynchronous DDCMP connection from node HELIUM to node OXYGEN; node HELIUM is assumed to be an end node, and the dynamic line is assumed to be a slow (1200 baud) modem line, as depicted in Figure 5.7, ''A Dynamic Asynchronous DDCMP Network Configuration''.
Before entering these commands, refer to the procedure for installing dynamic asynchronous lines in Section 5.2.3.4, ''Installing Dynamic Asynchronous Lines''.
Node OXYGEN Database
! ! Define executor-specific parameters for local node ! OXYGEN. ! DEFINE EXECUTOR ADDRESS 1 - BUFFER SIZE 576 - MAXIMUM HOPS 6 - MAXIMUM VISITS 12 - STATE ON TYPE NONROUTING IV ! ! Define common node parameters for the local node. Be ! sure to add the NETNONPRIV user to your system ! authorization file by using the Authorize utility. ! DEFINE EXECUTOR NAME OXYGEN - NONPRIVILEGED - USER NETNONPRIV - PASSWORD NONPRIV ! ! Define the remote node. Use the INBOUND ! parameter to check whether dialup node HELIUM will ! operate as an end node or as a router. As an added ! security feature for a node using a dynamic asynchronous ! communications line, specify a receive ! password for node HELIUM. This will be compared with ! the transmit password supplied by HELIUM when it ! issues the connect request. ! DEFINE NODE 2 NAME HELIUM - INBOUND ENDNODE - RECEIVE PASSWORD 10101010 ! ! You do not need to define parameters for a ! line/circuit to node HELIUM. These parameters are ! provided automatically by the system when the dynamic ! connection is initiated. ! ! ! The object database does not need to be defined ! because it defaults to the standard list of objects ! known to the operating system. ! ! ! Define transmitter-related logging parameters. ! DEFINE LOGGING MONITOR KNOWN EVENTS ! ! Define receiver-related logging parameters. ! DEFINE LOGGING MONITOR STATE ON
Node HELIUM Database
! ! Define executor-specific parameters for local node ! HELIUM. ! DEFINE EXECUTOR ADDRESS 2 - BUFFER SIZE 192 - SEGMENT BUFFER SIZE 192 - STATE ON - TYPE NONROUTING IV ! ! Define common node parameters for the local node. ! Be sure to add the NETNONPRIV user to your system ! authorization file by using the Authorize utility. ! DEFINE EXECUTOR NAME HELIUM - NONPRIVILEGED - USER NETNONPRIV - PASSWORD NONPRIV ! ! Define the remote node. Specify a transmit ! password which matches the receive password in the ! remote node database on node OXYGEN. ! DEFINE NODE 1 NAME OXYGEN - TRANSMIT PASSWORD 10101010 ! ! You do not need to define parameters for a ! line/circuit to node OXYGEN. These parameters are ! provided automatically by the system when the dynamic ! connection is initiated. ! ! ! The object database does not need to be defined ! because it defaults to the standard list of objects ! known to the operating system.
5.4. System Configuration Guidelines
Proper network operation, particularly in a routing environment, requires that you properly configure the system software running on each node in the network. Memory and processor time are two principal resources that you need to define.
5.4.1. Normal Memory Requirements
Most of the memory required by the network software is allocated from the nonpaged dynamic memory pool. You configure this pool by setting the system parameter NPAGEDYN.
The AUTOGEN utility sets system parameters when the operating system is first installed. They do not usually require modification. If, however, you find that you need to modify the system parameters to properly tune the system, edit the file SYS$SYSTEM:MODPARAMS.DAT and run AUTOGEN.
The amount of nonpaged dynamic pool used by DECnet is related to the values of several EXECUTOR, LINE and CIRCUIT parameters. DECnet dynamically allocates and deallocates nonpaged dynamic pool as needed, so setting most of these parameters to have high values does not consume nonpaged pool until the resources are actually used. For example, setting EXECUTOR MAXIMUM LINKS to a high value does not use any additional pool until the additional links are actually created.
The following parameters have the greatest influence over the amount of nonpaged dynamic pool used by DECnet.
EXECUTOR ALIAS MAXIMUM LINKS
EXECUTOR BUFFER SIZE
EXECUTOR MAXIMUM BUFFERS
EXECUTOR MAXIMUM CIRCUITS
EXECUTOR MAXIMUM LINKS
EXECUTOR PIPELINE QUOTA
EXECUTOR SEGMENT BUFFER SIZE
LINE BUFFER SIZE
LINE RECEIVE BUFFERS
CIRCUIT SERVICE ENABLED
5.4.2. Critical Routing Node Requirements
For some critical VAX routing nodes in large networks, you may need to guarantee that user processes running on the node never interfere with the memory requirements of the network software. In this case, you may want to configure the system for worst-case use of the nonpaged dynamic pool.
If you run almost or completely out of pool, the consequences are apparent to system users: System performance will be very sluggish; processes will continually enter the MWAIT scheduling state while they wait for available free pool; and the SHOW MEMORY display will indicate almost no nonpaged free pool.
If the lack of pool causes the network software on the node to be unable to allocate a buffer fast enough to receive data from a communications line, the line may be considered unusable by another node in the network. When this happens, the network attempts to adaptively reconfigure itself, thereby resulting in network traffic consisting of configuration update messages.
If the node with pool problems is close to failing, without failing completely, it may alternate between working and not working, thereby causing the network to repeatedly reconfigure itself. Ultimately, these reconfigurations degrade the performance of the entire network.
5.4.3. CPU Time Requirements
Most of the procedures that control network routing are located in NETDRIVER. Because most of NETDRIVER runs at elevated interrupt priority level (IPL), normal user programs cannot preempt its execution. However, user-written drivers and privileged programs running at elevated IPL can affect the proper operation of NETDRIVER.
The VSI VMS Device Support Manual provides guidelines for elevated IPL execution programming. In general, a program should run at elevated IPL only as long as necessary to synchronize correctly with other processes and devices. In particular, running at IPL IPL$_SYNCH for more than a few hundred milliseconds or running at any IPL at or above IPL$_MAILBOX for more than a few hundred milliseconds may adversely affect the network software. The effect of improper elevated IPL programming on the whole network is the same as having insufficient free nonpaged dynamic pool.
The NETACP process contains the procedure that handles the automatic network reconfiguration for a network node. Therefore, for proper network operation, the NETACP process must also be assured of sufficient processor time. It runs at a base priority of 9, which is well above the recommended base priority of 4 for normal users. However, real-time processes running at priorities 10 through 31 can preempt the execution of NETACP.
Just as for user-written drivers, the programming of real-time processes must account for the needs of the network software and other system software. A rule of thumb for real-time processes is that they should not normally preempt the execution of NETACP for more than a few hundred milliseconds at a time, and they should never preempt its execution for more than 5 to 10 seconds. This restriction allows NETACP sufficient processor time to run its routing algorithms properly.
If NETACP is unable to perform all of its functions, the effects on the whole network will be the same as having insufficient free pool or incorrect elevated IPL programming. If the preceding guidelines cannot be met for a particular real-time application, the application should probably not be used on a node that is also doing network routing.
The NETACP process, like all system processes, can be swapped and paged. However, because its base priority is 9, it is one of the last processes swapped when it is running and swapping becomes necessary. Also, NETACP receives high priority for paged disk I/O requests. Again, improper considerations for the disk I/O needs of NETACP can adversely affect the network as a whole. If the NETACP process continually enters the PFW or COMO scheduling state, it is probably not receiving sufficient priority for paging or swapping; other real-time or system programs should probably be modified to relieve the problem.
You can use the NETACP$BUFFER_LIMIT logical name to override the default BYTLM quota given to the network ancillary control process (NETACP). Prior to invoking SYS$MANAGER:STARTNET.COM, you should define NETACP$BUFFER_LIMIT in SYSTARTUP_V5.COM.
5.4.3.1. Adjusting NETACP Quotas with the NETACP$ Logical Names
To adjust the amount of resources allocated to the network ancillary control process (NETACP), you can define certain system logical names in SYS$MANAGER:SYLOGICALS.COM prior to invoking SYS$MANAGER:STARTNET.COM. These are the system logical names and their associated quotas:
| System Logical Name | Quota |
|
NETACP$MAXIMUM_WORKING_SET |
WSQUOTA |
|
NETACP$PAGE_FILE |
PGFLQUOTA |
|
NETACP$EXTENT |
WSEXTENT |
|
NETACP$ENQUEUE_LIMIT |
ENQLM |
|
NETACP$BUFFER_LIMIT |
BYTLM |
For most systems, the default values for these quotas are adequate. Do not define these system logicals unless you observe performance or resource quota problems.
For example, if the NETACP process consistently exhibits an unacceptable page fault rate, adjust NETACP’s WSQUOTA and WSEXTENT. The appropriate values for these quotas are configuration dependent, but in general, systems with relatively large node databases require higher values.
The following specific symptoms indicate that you should adjust the NETACP process BYTLM quota:
When you attempt to turn on a line, you receive the following message:
%SYSTEM_F_EXQUOTA, exceeded quota
A circuit does not transition into the ON state but remains in ON-SYNCHONIZING state after you enable service. However, this circuit does start correctly after service is disabled.
Here is a rough calculation to estimate how much BYTLM quota NETACP requires:
Allow 3500 bytes to start up DECnet
Add to this the total, for all lines, of receive buffers multiplied by line buffer size
Increase BYTLM by 7200 bytes for each circuit that has service enabled
5.4.3.2. Adjusting NETACP Node Data Block Allocations with NET$ Logical Names
When NETACP recycles an idle node counter block, it generates DECnet event 3.2 (Database Reused).
You can control the initial and the incremental values used for allocation of node counter blocks with the following two logical names:
NET$NODE_COUNTER_BLOCKS_INITIAL determines the number of node counter blocks initially allocated by NETACP during startup. The range is from 8 to 2048, and the default is 32.
NET$NODE_COUNTER_BLOCKS_INCREMENTAL determines the number of node counter blocks incrementally allocated by NETACP when needed to create connections. The range is from 8 to 512, and the default is 32.
To use these logical names, they must be in the system logical name table and defined before DECnet startup.
5.4.4. Permanent Database Considerations in VAXclusters
|
File Name |
Usage |
|---|---|
|
SYS$SYSTEM:NETNODE_REMOTE.DAT |
Remote node |
|
SYS$SYSTEM:NETNODE_LOCAL.DAT |
Executor and loop node |
|
SYS$SYSTEM:NETLINE.DAT |
Line |
|
SYS$SYSTEM:NETLOGING.DAT |
Logging |
|
SYS$SYSTEM:NETOBJECT.DAT |
Object |
|
SYS$SYSTEM:NETCIRC.DAT |
Circuit |
|
SYS$SYSTEM:NETCONF.DAT |
Configurator module |
|
SYS$SYSTEM:NETPROXY.DAT |
Permanent proxy database |
In a VMScluster, you may want to allow some of these files to be shared by members of the cluster. If so, move shared files to SYS$COMMON:[SYSEXE] and leave files that are not to be shared in SYS$SPECIFIC:[SYSEXE] (where they are normally created). NETNODE_LOCAL.DAT should not be shared because it contains executor information that is unique for each node in a cluster. Other files such as NETLINE.DAT, NETCONF.DAT, and NETCIRC.DAT should not be shared if the communications hardware configurations within the cluster are not identical on every node.
- Copy the permanent object database from one node to the common system root, for example:
$ COPY SYS$SPECIFIC:[SYSEXE]NETOBJECT.DAT- _$ SYS$COMMON:[SYSEXE]*;
- Delete the permanent object database from the private system root on each node in the cluster, for example:
$ DELETE SYS$SPECIFIC:[SYSEXE]NETOBJECT.DAT;*
or$ RUN SYS$SYSTEM:SYSMAN SYSMAN> SET ENVIRONMENT/CLUSTER %SYSMAN-I-ENV, current command environment: Clusterwide on local cluster Username SYSTEM will be used on nonlocal nodes SYSMAN>DO DELETE SYS$SPECIFIC:[SYSEXE]NETOBJECT.DAT;*
Chapter 6. Installation of a Network
This chapter describes how to start DECnet for OpenVMS and how to install and start VAX P.S.I. Refer to the VSI OpenVMS DECnet Guide to Networking for a summary description of the complete DECnet for OpenVMS installation procedure.
A network consists of two or more nodes linked together. If there is no existing network to which you can connect your node, work with the managers of other systems to create a new network. A new network is formed when two or more systems are connected by communications lines and each system is brought up as a network node.
The following sections describe how to register a DECnet for OpenVMS Product Authorization Key (PAK) and how to bring up your node on a new or existing network.
6.1. Installing a DECnet for OpenVMS Key
To permit your node to communicate with other nodes on the network, you must have a DECnet for OpenVMS license. Also, you must register the DECnet for OpenVMS PAK on your system using the License Management Facility (LMF).
Nodes configured as routers must have a routing license. An extended function license is available for some systems. This license allows level 1 routing to be enabled solely to support the use of a cluster alias. The PAK for the end node license permits you to configure your node only as an end node. A PAK for the routing or extended function licenses will permit you to configure your node as either an end node or a router.
Note
On AXP systems, VSI supports level 1 routing only for nodes acting as routers for a cluster alias. VSI does not support level 2 routing or routing between multiple circuits.
You can register the DECnet for OpenVMS PAK before or after you configure DECnet for OpenVMS. If DECnet for OpenVMS is running when you register your license, you must stop and then restart DECnet for OpenVMS. If the license is not registered and activated, your use is limited to local DECnet only.
You can control which VMScluster nodes have access to routing or end node licenses.
Use an extended function or routing license to enable level 1 routing on VMScluster nodes that act as routers for the cluster alias. The extended function license does not support routing between multiple circuits.
Use the LICENSE MODIFY/INCLUDE=(node-name[,node-name,...]) command to assign licenses to nodes and limit access as needed. For example, you can assign a routing node license to only one cluster node and assign the end node licenses to the remaining cluster nodes. If you choose this approach, make sure you assign each end node license to the same list of nodes. That is, specify identical include lists for each license of the same type.
Refer to the VSI OpenVMS License Management Utility Guide for additional information on licensing.
6.2. Bringing Up Your Network Node Using STARTNET.COM
After you satisfy the prerequisites for establishing a network and define the necessary parameters in the configuration database (see Chapter 5, "Configuring a Network"), you are ready to bring up your DECnet for OpenVMS node. To do so, you must first define the local node (using the DEFINE EXECUTOR command) in the permanent database. This is the minimum requirement for the initial control of the operational state of the node.
$ @SYS$MANAGER:STARTNET.COM
This command starts DECnet and configures the volatile database with the parameters that you defined in the permanent database. This procedure also turns on the local node and all lines and circuits connected to it. In addition, STARTNET.COM starts the network command terminal software. At this point, the local node is ready for network operations with itself and with adjacent nodes.
%%%%%%%%%%% OPCOM 28-MAY-2020 11:36:48.83 %%%%%%%%%%% Message from user DECnet on node BOSTON DECnet starting
After you bring up your DECnet for OpenVMS node, you use NCP commands to control the operational states of network components. You can control both local components and remote executions of NCP commands. This control allows you to dynamically reconfigure your network to control the use of the network and its resources.
Parameters in the permanent database are used to define network components each time you use the word ALL with the SET command. Typically, you use the SET ‘‘component’’ ALL command if you choose not to use STARTNET.COM to bring up the network. Section 6.4, ''Shutting Down Your DECnet for OpenVMS Node'' discusses how to shut down the network.
6.3. Testing the Installation with UETP Test Procedure
To ensure that the DECnet for OpenVMS installation is successful, you can run the User Environment Test Package (UETP) to test DECnet. The test procedure is described in the VSI OpenVMS Upgrade and Installation Manual.
6.4. Shutting Down Your DECnet for OpenVMS Node
- To shut down your local node without destroying active logical links, enter the following command:
NCP> SET EXECUTOR STATE SHUT
This command closes the node in an orderly fashion; new links are not allowed, and existing links are not terminated. When all logical links are disconnected, the executor is turned off.
When the last link terminates and is disconnected, the executor node in the SHUT state enters the OFF state. This action occurs whether or not the node is currently in use for route-through traffic. Consequently, the communication path between nodes using the local node for route-through may be broken.
- Instead of shutting down your local node, you can restrict network operations on that node. This restriction does not affect current logical link activity; however, no new inbound logical links can be created unless they originate locally or unless a process with the OPER privilege confirms them. Enter the following command to restrict local node operations:
NCP> SET EXECUTOR STATE RESTRICTED
- To shut down the local node regardless of current logical link activity, enter the following command:
NCP> SET EXECUTOR STATE OFF
This state allows no new logical links to be created, terminates existing links, and stops route-through traffic.Note
Programs that have declared names or object numbers and that are started independently of DECnet for OpenVMS should be programmed to terminate when their mail boxes receive a MSG$_NETSHUT message. This message appears when the node is shutting down.
Message from user DECNET on BOSTON DECnet shutting down
| State | Route-Through Traffic | Connect Confirm Operations | Connect Initiate Operations |
|---|---|---|---|
| ON | Unrestricted | Unrestricted | Unrestricted |
| RESTRICTED | Unrestricted | Unrestricted only if the partner node is the local node or if the confirming process has the OPER privilege | Unrestricted |
| SHUT | Unrestricted | Unrestricted only if the confirming process has the OPER privilege | Unrestricted only if the initiating process has the OPER privilege |
| OFF | Restricted | Restricted | Restricted |
Chapter 7. Testing the Network
NCP provides several kinds of tests to help you determine whether the network is operating properly. After you start DECnet for OpenVMS software, you may want to run some of these tests.
These tests let you exercise network software and hardware by sending data through various network components and then returning that data to its source. VSI supplies variations of these tests to exercise separate layers of the network. User-written processes or DECnet-supplied processes may also initiate the tests.
In general, problems that you encounter with the DECnet for OpenVMS network software probably arise from misconfigured system and DECnet parameters that you can fix using SYSGEN or NCP.
DECnet for OpenVMS tests fall into two categories: node-level loopback tests and circuit-level loopback tests. Use node-level tests to evaluate the operation of logical links, routing, and other network-related software. Use circuit-level tests to evaluate the operation of circuits.
Note
You cannot use all LOOP commands on asynchronous lines or circuits.
Using node-level tests first is recommended; then, if necessary, use circuit-level tests. This chapter describes these variations as they relate to DECnet loopback capabilities and the NCP command LOOP, and provides a practical approach to their use.
Note
The ability to perform loopback tests on your system requires the existence of a default account for the MIRROR object, as described in Section 2.6.1, ''DECnet for OpenVMS Objects'' and Section 5.2.2, ''Using NETCONFIG.COM''.
7.1. Node-Level Tests
Loopback tests for logical link operation regardless of the circuit
Loopback tests for operation over a specified circuit
The second test sends test messages over a specified circuit associated with a loop node name (see Section 7.1.2, ''Local and Remote Loopback Tests Using a Loop Node Name'').
In the first test, loop information to a remote loopback mirror process using a remote loopback test. This tests all local and remote network software up to the DNA user layer on the remote node.
If the first test fails, use a loop node name and loop information to the local node and to a remote node. The loop node name allows you to direct traffic over a specified circuit, which tests local and remote Routing layer software.
If the second test fails, set the circuit's line to "controller loopback" and repeat step 2.
Regardless of the type of test you choose, use the NCP command LOOP NODE to send test messages. This NCP function uses a cooperating process called the Loopback Mirror to facilitate the transmission and reception of test messages.
When you use this command, you have the option of controlling the type of binary information (MIXED, ONES, ZEROS); the number of blocks of information, which ranges from 1 to 65,535; and the length in bytes of each block to be looped, which ranges from 1 to 4096. (VSI recommends using a maximum block length of 4096 bytes to reduce the system load.) The default loop length is 4096. You can raise the maximum loop length beyond 4096 by defining the MIRROR$SIZE logical as described in VSI OpenVMS DECnet Network Management Utilities.
If your message returns with an error, the test stops and NCP prints a message that indicates a test failure, specifies the reason for the failure, and provides a count of the messages that were not returned. For descriptions of NCP system messages, refer to the OpenVMS system messages documentation. You can use the DCL command HELP/MESSAGE to obtain online descriptions of system messages.
NCP> LOOP NODE BOSTON COUNT 10 %NCP-W-LINCOM, line communication error Messages not looped = 8
7.1.1. Remote Loopback Test
Use the LOOP NODE command to test for a logical link connection between two nodes. When using this command, you must identify the node to which you want to loop test messages. Figure 7.1, ''Remote Loopback Test'' illustrates a remote loopback test.
NCP>SET LINE SVA-0 STATE ON NCP>SET CIRCUIT SVA-0 STATE ON NCP>LOOP NODE TRNTO COUNT 10
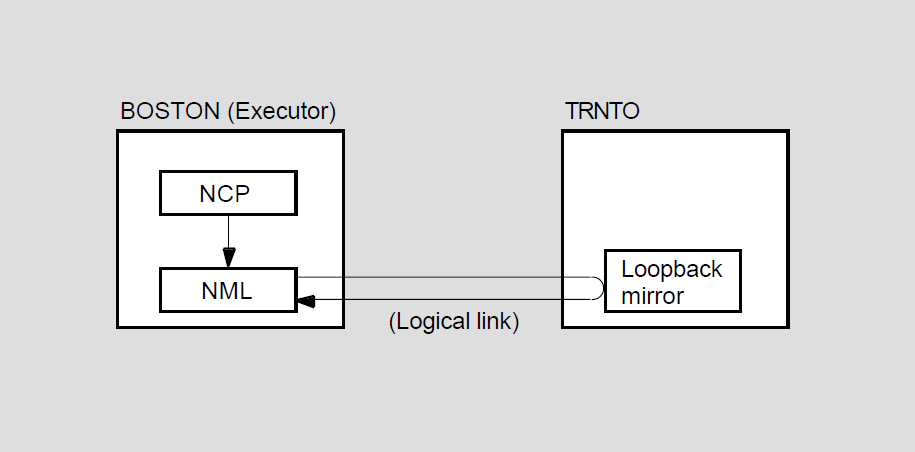
For this test, you first turn the selected remote node line and circuit to the ON state to allow for logical link activity. Then, you use the LOOP NODE command. For example, the following set of commands tests both local and remote DECnet software on nodes BOSTON and TRNTO:
7.1.2. Local and Remote Loopback Tests Using a Loop Node Name
NCP>SET CIRCUIT SVA-0 STATE ON NCP>SET NODE TESTER CIRCUIT SVA-0
No other parameters are valid for loop nodes. This circuit must be turned on when performing these tests.
Note that you cannot assign two loop node names to the same circuit. For example, after you establish TESTER as the loop node name for circuit SVA–0, you must enter a CLEAR NODE TESTER CIRCUIT command before assigning another loop node name to SVA–0.
NCP> CLEAR NODE TESTER CIRCUIT
A loop node name specified with the SET NODE CIRCUIT command may be used for any network traffic (for example, COPY requests or application program traffic). The loopback node name appears as a valid node name in the network for all purposes.
7.1.2.1. Local-to-Remote Testing
To test a logical link path over a circuit between the local node and a remote node, you must specify a loop node name for the given circuit and enter the LOOP NODE command. Figure 7.2, ''Local-to-Remote Loopback Test Using a Loop Node Name'' illustrates a local-to-remote loopback test using a loop node name.
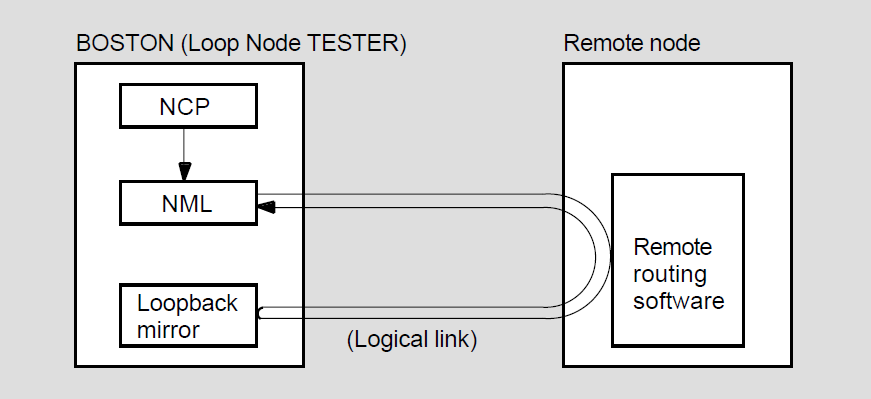
NCP>SET LINE SVA-0 STATE ON NCP>SET NODE TESTER CIRCUIT SVA-0 NCP>SET CIRCUIT SVA-0 STATE ON NCP>LOOP NODE TESTER COUNT 10
This set of commands tests both local and remote Routing layer software operation. Both end nodes and routing nodes have Routing layer software. The test messages are looped over the loopback circuit. Because the test actually tests the operation of the Routing layer on the remote node, the message may not come back on the circuit over which it was sent.
7.1.2.2. Local-to-Local Controller Loopback Testing
On devices that support controller loopback testing, if the local-to-remote test fails, try a local loopback test with the local node to test local Routing layer software exclusively. Both end nodes and routing nodes have Routing layer software. To test a logical link path over a specified line on the local node, specify a loop node name and set the device controller to loopback mode. Figure 7.3, ''Local-to-Local Loopback Test Using a Loop Node Name'' illustrates a local-to-local loopback test using a loop node name.
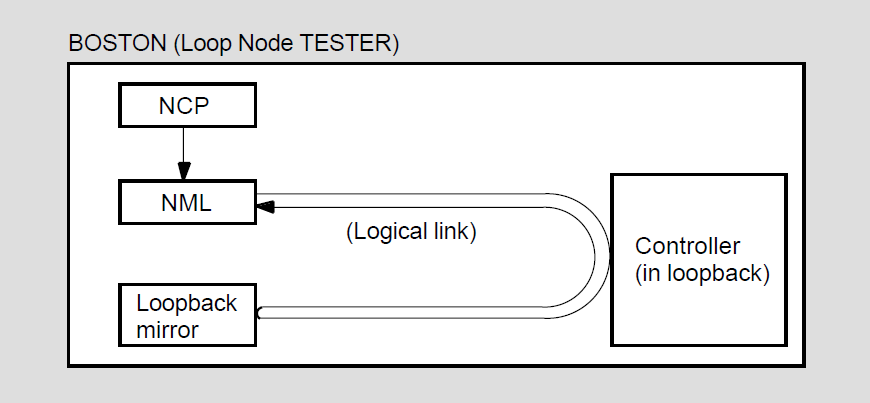
Note
DECnet for OpenVMS does not support controller loopback testing on all devices.
NCP> SET LINE DMC-0 STATE OFF NCP> SET LINE DMC-0 CONTROLLER LOOPBACK NCP> SET LINE DMC-0 STATE ON NCP> SET CIRCUIT DMC-0 STATE ON NCP> SET NODE TESTER CIRCUIT DMC-0 NCP> LOOP NODE TESTER COUNT 10 LENGTH 32
Note
Because of restrictions in the operation of the DMC controller, you must use a block length of fewer than 50 bytes for controller loopback tests.
7.1.3. Local Loopback Test
If the loopback tests described in Section 7.1.2.2, ''Local-to-Local Controller Loopback Testing'' fail, then use either the LOOP NODE command with the local node-id or the LOOP EXECUTOR command to test local DECnet software. This type of test uses DECnet for OpenVMS software to loop messages to the loopback mirror on the local node. Figure 7.4, ''Local Loopback Test'' illustrates a local loopback test.
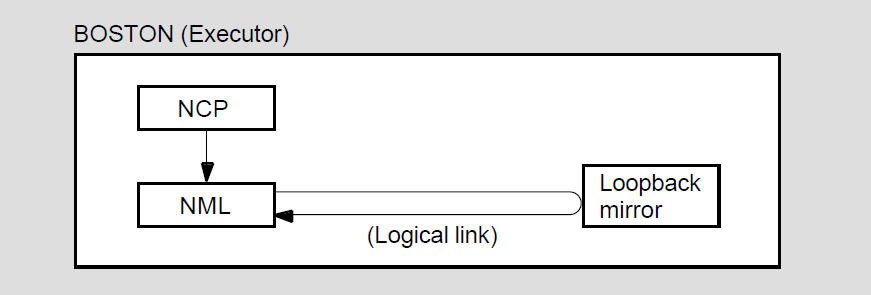
NCP> LOOP EXECUTOR COUNT 10
This test evaluates the local DECnet software using an internal logical link path. If this test succeeds and the other node-level tests fail, then try the circuit-level tests. If these tests fail, the executor's default nonprivileged DECnet account is probably set up incorrectly.
7.2. Circuit-Level Tests
Circuit-level loopback tests examine a DECnet circuit by looping test data through a hardware loopback device on the circuit, either through a modem (or loopback connector) or through a remote node. The tests that use a hardware loopback device are referred to as controller loopback tests. The tests that use a loopback connector or a modem are referred to as circuit loopback tests. The tests that use the software capabilities of the system are referred to as software loopback tests.
In the first test, perform a software loopback test to another node to determine whether the circuit is operational up to the remote circuit unit and controller.
If the first test fails, set the controller to loopback mode and use a controller loopback test to determine whether the controller works.
If the second test succeeds, then attach a modem (or loopback connector) to the controller and use a circuit loopback test to determine whether the unit is functional.
Regardless of the test type, use the NCP command LOOP CIRCUIT to perform a circuit-level loopback test. When you enter this command, you have the option of controlling the type of binary information (MIXED, ONES, ZEROS); the number of blocks of information, which ranges from 1 to 65,535; and the length in bytes of each block to be looped, which ranges from 1 to 4096. The default loop length is 4096. You can raise the maximum loop length beyond 4096 by defining the MIRROR$SIZE logical as described in Section 7.3, ''Using the MIRROR$SIZE Logical''.
For the complete syntax of the LOOP CIRCUIT command, refer to the VSI OpenVMS DECnet Network Management Utilities.
If the test data message returns with an error, the test stops and NCP issues a message indicating a test failure, the reason for the failure, and a count of the messages that were not returned. For descriptions of NCP system messages, refer to the OpenVMS system messages documentation. You can use the DCL command HELP/MESSAGE to obtain online descriptions of system messages.
In the following example, the test attempts to send ten messages, each 50 bytes long. The first two messages are sent successfully, and an error occurs on the third.
NCP> SET LINE SVA-0 CONTROLLER NORMAL STATE ON NCP> LOOP CIRCUIT SVA-0 COUNT 10 %NCP-W-LINPRO, line protocol error Messages not looped = 8
7.2.1. Software Loopback Test
Use the LOOP CIRCUIT command to perform a software loopback test of a circuit connected to the local node. This type of test uses DECnet for OpenVMS software to loop through the circuit-to-circuit service software in the adjacent node and back to the local node. Figure 7.5, ''Software Loopback Test'' illustrates a software loopback test that checks whether the circuit is operational up to the remote unit and controller on the adjacent node.
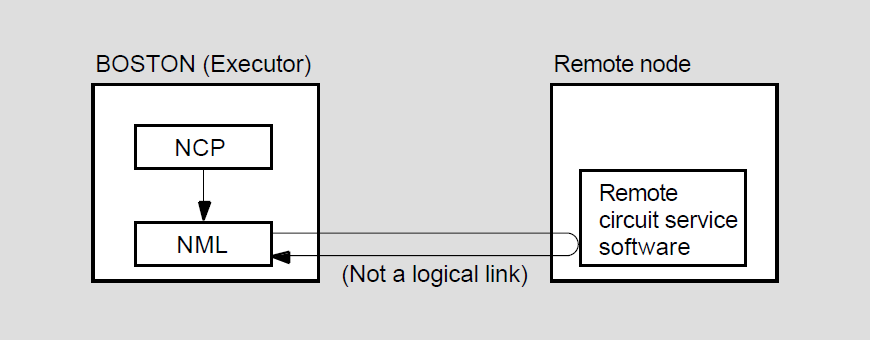
NCP>SET LINE SVA-0 STATE OFF NCP>SET LINE SVA-0 CONTROLLER NORMAL NCP>SET LINE SVA-0 STATE ON NCP>SET CIRCUIT SVA-0 STATE ON NCP>LOOP CIRCUIT SVA-0 COUNT 10 NODE BOSTON
This set of commands tests the circuit SVA-0 up to the adjacent node. If this test fails, try a circuit loopback test to verify that the circuit is functional.
For additional detail about tests on broadcast circuits, see Section 7.2.3, ''Circuit-Level Loopback Testing''.
7.2.2. Controller Loopback Test
Use the LOOP CIRCUIT command to perform a controller loopback test of a physical line on the local node while the controller is in loopback mode. This type of test verifies whether the circuit up to the controller and the controller itself are functional. Figure 7.6, ''Controller Loopback Testing'' illustrates a controller loopback test.
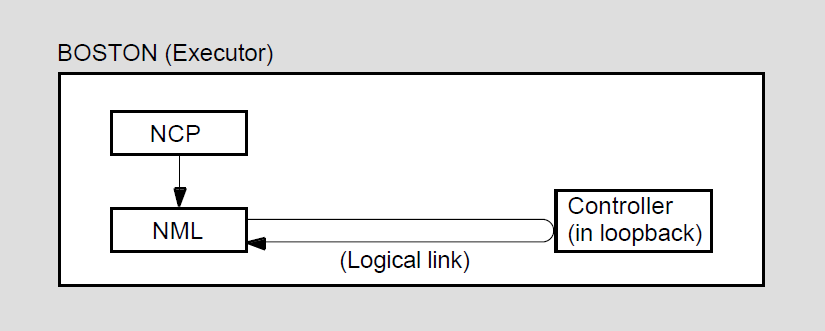
Note
DECnet for OpenVMS does not support controller loopback testing on all devices.
NCP>SET LINE DMC-0 STATE OFF NCP>SET LINE DMC-0 CONTROLLER LOOPBACK NCP>SET LINE DMC-0 STATE ON NCP>SET CIRCUIT DMC-0 STATE ON NCP>LOOP CIRCUIT DMC-0 COUNT 10 LENGTH 32
Note
Because of restrictions in the operation of the DMC controller, you must use a block length of fewer than 50 bytes for controller loopback tests.
7.2.3. Circuit-Level Loopback Testing
Loopback testing on point-to-point and multipoint circuits (DMCs and DMPs) requires two separate processors (one at each end), but broadcast circuit loopback testing requires only one processor. In broadcast circuit loopback testing, the target node’s controller, rather than its processor, loops the messages.
In broadcast and point-to-point circuit-level loopback testing, network management accesses the Data Link layer directly, thus bypassing intermediate layers. One advantage of the loopback test is that it can be performed concurrently with other DECnet operations on the circuit.
7.2.3.1. Testing with the PHYSICAL ADDRESS and NODE Parameters
Typical broadcast circuit loopback testing involves looping messages to remote systems over the LAN; this tests the capability of both the local and the remote controllers to send and receive messages. In those cases, you are required to supply information such as the physical address or the node name or address of the circuit at the remote node that you want to test.
Note
To be tested, a broadcast circuit must be in the ON state and the SERVICE parameter must be set to ENABLED. (By default, the SERVICE parameter is set to DISABLED for broadcast circuits.)
Nodes on broadcast circuits are identified by unique physical addresses.
A physical address is 48 bits in length and is represented by six pairs of hexadecimal digits (6 bytes), separated by hyphens (for example, AA–00–04–00–67–89). For more detail on physical addresses, see Section 2.1.2, ''Hardware Addresses and Physical Addresses''.
Each controller on the broadcast circuit has a hardware address (in read-only memory) that has been assigned to it by the manufacturer. Typically, DECnet sets a physical address for the controller, thereby replacing the hardware address as the address to which the controller currently responds. The controller’s physical address continues to be the address to which it responds, unless it is reset to the hardware address value (for example, if the system is powered down and then powered up).
It is helpful to know the physical address of the controller on the remote node that you want to test. Because this is not always possible, plan to include the hardware address of each of the controllers on your broadcast circuit in the node database. You can then use the node-id in the LOOP command. When you specify node-id, the network management software retrieves the hardware address from the volatile database and attempts to transmit the loop message to the remote controller by alternately using the hardware address and the physical address that DECnet normally uses.
The following example contains a physical address:
NCP>LOOP CIRCUIT SVA-0 PHYSICAL ADDRESS AA-00-04-00-FF-04
Because, in this case, you know the physical address of the remote node that you want to test, you merely include the PHYSICAL ADDRESS parameter with its value. If, however, that physical address had changed (for example, if it had been reset to the hardware address value), the loopback would have failed. You would have received the following message:
%NCP-W-LINPRO, line protocol error Messages not looped = 8
If you also know the name or address of the remote node, you could test the controller on that node even though its physical address may have changed. The hardware address of the node to be tested must already have been entered in the database on the executor node. If the hardware address is included in the volatile database, and you test by supplying the node name or DECnet address, the loop test is attempted by the network management software to both the hardware address and the physical address derived from the DECnet address.
An example of a loopback test that specifies the NODE parameter is the following:
NCP>LOOP CIRCUIT SVA-0 NODE TEST
Assume that TEST’s physical address, which was AA–00–04–00–F7–04, is changed. Thus, any attempt to test TEST using the old physical address does not succeed. If, however, TEST’s hardware address (which was 08–00–2B–23–F6–8A) is included in the volatile database on the executor node, the loopback test with the NODE parameter in its specification does succeed.
In the preceding example, you could alternatively supply the node address value (such as 1.247) for the NODE parameter. For example, if you know the node-id but not the name of the node, you could enter the following:
NCP>LOOP CIRCUIT SVA-0 NODE 1.247
In this case, the node address is used to construct the physical address, and the hardware address (assuming that it is included in the volatile database) is used to access the circuit on the remote node and complete the loopback test. Thus, entering the hardware address in the volatile database is important.
If you want to examine the hardware address of your own controller (in this case SVA-0), you can use the NCP command SHOW LINE CHARACTERISTICS. For example:
NCP>SHOW LINE SVA-0 CHARACTERISTICS
When you enter this command, you receive a display such as the following:
Line Volatile Characteristics as of 15-JUN-2020 15:33:25 Line = SVA-0 Receive buffers = 0 Controller = normal Protocol = Ethernet Service timer = 4000 Hardware address = 08-00-2B-55-43-F2 Buffer size = 1498
7.2.3.2. Loopback Assistance
DECnet supports the use of an assistant physical address and an assistant node to aid you in interrogating a remote node. To use this feature, you specify either the ASSISTANT PHYSICAL ADDRESS parameter or the ASSISTANT NODE parameter as an additional parameter to the LOOP CIRCUIT command.
You can use the "assistant" in three distinct ways. First, you can use it to assist you in receiving loop messages from a remote node. Second, you can use it in transmitting loop messages to a remote node. Third, you can use it in both transmitting messages to and receiving messages from a remote node.
There are various reasons why you might choose one form of assistance over another. For example, the target node to which you want to transmit a message may be located at a point where the signals are too weak to send a message. In this case, you could request assistance in transmitting the message to the target node. Similarly, you may be able to transmit messages to the target node, but not be able to receive messages from it. In such a case you can send a message directly to the target node and request an "assistant" to aid you in receiving a message from the target node. When you encounter difficulties in both sending and receiving messages, you can request an assistant node to help you to both transmit messages to and receive messages from the target node.
NCP> LOOP CIRCUIT SVA-0 PHYSICAL ADDRESS AA-00-04-00-18-04 - _ ASSISTANT PHYSICAL ADDRESS AA-00-04-00-15-04 NCP> LOOP CIRCUIT SVA-0 NODE LOON ASSISTANT NODE THRUSH
In the first command, you are requesting the node described by the physical address AA–00–04–00–15–04 to assist you in testing the node described by the physical address AA–00–04–00–18–04. In the second command, you are requesting the node THRUSH to assist you in testing node LOON.
If you specify either the ASSISTANT PHYSICAL ADDRESS or ASSISTANT NODE parameter and you do not specify the HELP parameter, you receive FULL assistance; that is, you are assisted both in receiving and transmitting loop messages. In the preceding examples, because the ASSISTANT PHYSICAL ADDRESS and ASSISTANT NODE parameters are specified without the HELP parameter, the default is FULL assistance.
NCP> LOOP CIRCUIT SVA-0 NODE LOON ASSISTANT NODE THRUSH HELP RECEIVE
NCP> LOOP CIRCUIT UNA-0 NODE LOON ASSISTANT NODE 21 HELP TRANSMIT
In this case, the ASSISTANT NODE parameter contains the node address, rather than the name of the node as in the previous example. In each of the last two examples, the HELP parameter is included to specify the type of assistance desired.
7.3. Using the MIRROR$SIZE Logical
You can define the MIRROR$SIZE system logical to raise the maximum loop message length from 4096 bytes up to a value no greater than 32,767 bytes. For example:
$DEFINE /SYSTEM MIRROR$SIZE 32767 $MCR NCP NCP>LOOP EXECUTOR LENGTH 8192
Chapter 8. Performing Network User Operations
Retrieve information about the status of the nodes in your network.
Establish communication with a remote DECnet node through the command terminal facility.
Access files on remote nodes.
Perform task-to-task operations.
This chapter describes each operation. The primary focus of this chapter, however, is on the use of task-to-task communication in network operations.
8.1. Retrieving Network Status Information
Before you perform a specific type of operation over the network, consider checking the status or availability of a particular node or nodes in your network. To retrieve such information, use the DCL command SHOW NETWORK. The SHOW NETWORK command displays the availability of the local node as a member of the network.
|
Node |
Identifies each available node in the network by its node address and node name. |
|
Links |
Shows the number of logical links between the local node and each available remote node. |
|
Cost |
Shows the total line cost of the path to a remote node. The system manager assigns the cost for each line in the network. |
|
Hops |
Shows the number of intervening nodes plus the target node. |
|
Next hop to node |
Shows the outgoing physical line used to reach the remote node. (The local node is identified by the term LOCAL. ) |
|
Area |
Identifies each available area in the network by its area number. This characteristic is displayed only if the local node is an area router. |
|
Next hop to area |
Shows the outgoing physical line used to reach the remote area. This characteristic is displayed only if the local node is an area router. The local node is identified by the term LOCAL. The node address and node name of the next hop to the target area are also displayed. |
VMS Network status for local node 2.1 NYC on 15-JUN-2020 09:18:03.07 The next hop to the nearest area router is node 2.62 ZEUS. Node Links Cost Hops Next Hop to Node 2.1 NYC 0 0 0 Local -> 2.1 NYC 2.2 RAEL 0 8 1 SVA-0 -> 2.2 RAEL 2.3 PANGEA 0 8 1 SVA-0 -> 2.3 PANGEA 2.4 TWDEE 0 10 2 SVA-0 -> 2.63 AURORA 2.5 TWDUM 0 8 1 SVA-0 -> 2.5 TWDUM 2.11 NEONV 0 8 1 SVA-0 -> 2.11 NEONV 2.63 AURORA 0 8 1 SVA-0 -> 2.63 AURORA Total of 7 nodes.
If your node is an area router, the SHOW NETWORK command displays additional information about the area.
This is a nonrouting node, and does not have any network information. The designated router for node NYC is node 2.62 ZEUS.
Network unavailable
For more detailed information about the DCL command SHOW NETWORK, see its description in the VSI OpenVMS DCL Dictionary.
8.2. Establishing Communication with a Remote Node
DECnet for OpenVMS supports a command terminal facility that permits users to establish communication with a remote node and to use the facilities of that system while physically connected to the local node. By means of this link, you can temporarily become a local user of the remote node and thereby perform functions that the remote node allows its local users to perform from a terminal.
In addition to communicating with remote DECnet for OpenVMS nodes, you can communicate with other nodes that support the DNA remote command terminal protocol facility (also referred to as the network virtual terminal facility). Consult the appropriate Software Product Descriptions for descriptions of other operating systems and their DECnet implementations.
$ SET HOST nodename
|
nodename |
Is a 1- to 6-character name or number specifying the remote node at which you want to log in. |
The SET HOST command does not recognize the area prefix in a node number. Therefore, to specify by number a node in another area, you must convert the node number to its decimal equivalent, as described in Section 3.7.2, ''Specifying the Area Number in a Node Address''.
The operating system on the remote node prompts for a user name and password. If the information you supply is valid, you are logged in to the remote node. To return control to your local node, type LOGOUT.
%REM-S-END, control returned to node _NODENAME::
This message indicates that control is returned to your local node.
The only special control character used for remote command terminal operations is CTRL/Y. Except for CTRL/Y, all control characters are handled as if they were issued at the local node.
Repeated, rapid pressing of CTRL/Y generates a prompt asking if the remote connection should be broken. If you answer YES to the prompt, control returns to the local node. This technique is useful if for some reason you cannot return to the local node normally.
$ SET HOST TRNTO
Username: SMITH
Password:
Welcome to VAX/VMS Version 5.5 on node TRNTO
.
.
.
$ LOGOUT
SMITH logged out at 30-DEC-2019 12:31:55:49
%REM-S-END, control returned to node _BOSTON::
$When you are logged in at a remote node, you can use the SET HOST command to establish communication with another node. After logging in to node TRNTO, you could use SET HOST again to log in to another node (for example, node DENVER).
You will again be prompted for a user name and password. If you then supply a valid user name and password for node DENVER, you are logged in.
Note that when you log out of node DENVER, control is returned to node TRNTO. You must log out of node TRNTO to return to your local node, BOSTON.
For more detailed information about the SET HOST command, see its description in the VSI OpenVMS DCL Dictionary.
8.3. Accessing Files on Remote Nodes
DECnet for OpenVMS allows you to access files on remote nodes in your network as though these files were on your local node. DECnet for OpenVMS provides facilities to access remote files by means of DCL commands and command procedures, and higher-level language programs using OpenVMS RMS or system services directly.
8.3.1. Using DCL Commands and Command Procedures
$ TYPE TRNTO::WORK$:[DOE]LOGIN.COM
In this example, the TYPE command requests that the file LOGIN.COM in the directory WORK$:[DOE] at the remote node TRNTO be displayed on your local terminal.
$ COPY TRNTO"DOE JE8V8DAJ"::WORK$:[DOE]LOGIN.COM *.*
In this example, an access control string is supplied as part of the request for the COPY operation. For VMS operating systems, the access control string consists of a user name, followed by one or more spaces or tabs, and, optionally, one password and/or one account.
As with DCL, remote file accessing by higher-level languages is accomplished in a way that is transparent to the user. The only additional information that you need to specify is the name of the remote node containing the file or files that you want to access. Like DCL, higher-level language programs also employ the VMS RMS services to perform file access operations.
Command descriptions in the VSI OpenVMS DCL Dictionary include restrictions that apply to individual commands and command qualifiers used in network operations.
8.3.2. Using Higher-Level Language Programs
Use the standard I/O statements of various higher-level languages to write programs that access remote files. Regardless of the programming language used, you access remote files exactly as you would access local files.
$ DEFINE SRC TRNTO::INVENTDISK$:[STOCKROOM.PAPER]INVENTORY.DAT $ DEFINE DST BOSTON::ARCDISK$:[ARCHIVE]TRNTO_INVENTORY.DAT
OPEN (UNIT=1,NAME=’SRC’,TYPE=’OLD’,ACCESS=’SEQUENTIAL’, FORM=’FORMATTED’) OPEN (UNIT=2,NAME=’DST’,TYPE=’NEW’,ACCESS=’SEQUENTIAL’, FORM=’FORMATTED’)
Use standard I/O statements to transfer records from one file to another, for example, FORTRAN read and write statements.
$ DEFINE SRC TRNTO::INVENTDISK$:[STOCKROOM.PAPER]INVENTORY.DAT $ DEFINE DSTLPR BOSTON::LPA0:
OPEN (UNIT=1,NAME=’SRC’,TYPE=’OLD’,ACCESS=’SEQUENTIAL’,
FORM=’FORMATTED’)
OPEN (UNIT=2,NAME=’DSTLPR’,TYPE=’NEW’,ACCESS=’SEQUENTIAL’,
FORM=’FORMATTED’,CARRIAGECONTROL=’LIST’,
RECORDTYPE=’VARIABLE’)Use standard I/O statements to transfer records from one file to another, for example, FORTRAN read and write statements.
8.3.3. Using OpenVMS RMS Services from Programs
The operating system provides a programming interface for remote file access. Programs can use OpenVMS Record Management Services (RMS) calls or system service calls to access remote files. This section describes how to use RMS to access remote files. The system services, which also provide access to remote files, are described more completely in Section 8.5.4, ''Using System Service Calls in MACRO Programs''.
For remote file processing, RMS integrates the network software necessary to translate standard RMS calls, which provides a transparent user interface to the network.
The RMS service calls provide remote file-handling operations on entire files or access individual records. You need only supply the name of the remote node in your file specification.
$ DEFINE SRC TRNTO::INVENTDISK$:[STOCKROOM.PAPER]INVENTORY.DAT $ DEFINE DST BOSTON::ARCDISK$:[ARCHIVE]TRNTO_INVENTORY.DAT
struct FAB src_fab; struct RAB src_rab; src_fab = cc$rms_fab; src_rab = cc$rms_rab; char src_file[13] = "SRC_FILE.TXT"; src_fab.fab$b_fac = FAB$M_GET | FAB$M_PUT; src_fab.fab$l_fna = &src_file; src_fab.fab$b_fns = sizeof (src_file); src_fab.fab$b_org = FAB$V_ORG; src_fab.fab$b_rat = FAB$M_CR; src_fab.fab$b_rfm = FAB$C_VAR; src_rab.rab$l_fab = &src_fab; src_rab.rab$l_ubf = &data_blk; src_rab.rab$l_rbf = &data_blk; src_rab.rab$w_rsz = sizeof ( data_blk ); src_rab.rab$w_usz = sizeof ( data_blk );
struct FAB dst_fab; struct RAB dst_rab; dst_fab = cc$rms_fab; dst_rab = cc$rms_rab; char dst_file[13] = "DST_FILE.TXT"; dst_fab.fab$b_fac = FAB$M_PUT; dst_fab.fab$l_fna = &dst_file; dst_fab.fab$b_fns = sizeof ( dst_file ); dst_fab.fab$b_org = FAB$V_ORG; dst_fab.fab$b_rat = FAB$M_CR; dst_fab.fab$b_rfm = FAB$C_VAR; dst_rab.rab$l_fab = &dst_fab; dst_rab.rab$l_ubf = &data_blk; dst_rab.rab$l_rbf = &data_blk; dst_rab.rab$w_rsz = sizeof ( data_blk ); dst_rab.rab$w_usz = sizeof ( data_blk );
After defining the source and destination FABs and RABs, open the files for remote file processing. If your program accesses files sequentially, specify the sequential-only (SQO) option of the file options (FOP) field of the FAB. Specifying FOP=SQO enables RMS and the remote File Access Listener (FAL) to enter into file-transfer mode. In file-transfer mode there is no wait for message acknowledgment and, consequently, there is a significant increase in file-transfer performance.
The Guide to OpenVMS File Applications contains examples of complete programs using RMS to access remote files. Examples in this document also illustrate the network-specific features provided by OpenVMS RMS.
The VSI OpenVMS System Services Reference Manual describes the RMS fields and options that you must specify for DECnet for OpenVMS applications. These manuals also describe restrictions that apply to using RMS over the network. See Chapter 9, "File Operations in a Heterogeneous Network Environment" for a list of restrictions on VMS operations involving other systems in a heterogeneous network.
Note
DECnet for OpenVMS does not support the use of RMS for operations on a remote magnetic tape volume.
8.4. Performing Task-to-Task Operations
Task-to-task communication is a feature common to all DECnet implementations. It allows two programs or tasks running under the same or different operating systems to communicate with each other regardless of the programming languages used. For example, a FORTRAN task running on the OpenVMS operating system at node BOSTON could exchange messages with a task running on the RSX–11M operating system at node DALLAS. Although these programs use different programming languages and run under different operating systems, the DECnet software translates system-dependent language calls into a common set of network protocol messages.
8.4.1. Transparent and Nontransparent Task-to-Task Communication
DECnet for OpenVMS supports both transparent and nontransparent task-totask communication. Transparent communication provides the means for a DCL command procedure or a user program to communicate with other command procedures or user programs over the network. Nontransparent communication allows the programmer to use system service options to perform network-specific functions.
There are important differences between these two forms of communication. Transparent communication is a form of device-independent I/O in which you move data with little concern for the way the operation is accomplished. Likewise, transparent communication allows you to move data across the network without necessarily knowing that you are using DECnet software. Nontransparent communication, on the other hand, is a form of device-dependent I/O, in that you are interested in specific characteristics of the device that you want to access. A nontransparent task, in turn, can use network-specific features to monitor the communication process.
Note
While it is possible for a single task to create and maintain both transparent and nontransparent connections, each connection should be processed separately. That is, transparent-specific RMS and system services apply to transparent links, and nontransparent-specific system services apply to nontransparent links.
8.4.1.1. Transparent Communication
Transparent communication provides the basic functions necessary for a task to communicate with another task over the network. These functions include the initiation and completion of a logical link connection, the orderly exchange of messages between both tasks, and the controlled termination of the communication process.
Transparent access provides the functions necessary to communicate over the network using standard I/O operations. To perform communication functions, you can write cooperating tasks using any of the following:
Any higher-level language that supports network operations using language I/O statements
RMS service calls
System service calls
DCL commands
System service calls are described in Section 8.5, ''Performing Transparent Task-to-Task Operations''.
8.4.1.2. Nontransparent Communication
Nontransparent communication provides the same functions as transparent communication plus additional system service and I/O features supported by DECnet for OpenVMS. In particular, a nontransparent task can create and use a VMS mailbox to receive information that is not available to a transparent task with transparent communication. You can make use of network-specific features such as optional user data on connects and disconnects, and interrupt messages. Also, nontransparent tasks can receive and process multiple inbound connection requests. (See the description in Section 8.6.1.5, ''Completing the Establishment of a Logical Link''.)
On a VMScluster node, nontransparent tasks that can receive multiple inbound connection requests should not use the cluster alias node address for outgoing connections. Also, they should not be enabled to receive incoming connections directed to the cluster alias node unless the same task is running on all nodes that allow incoming connections to the alias. Incoming links directed to a cluster alias node address can be assigned to any of the nodes in the cluster that accept that alias node address, without knowledge of the nodes on which a declared task may be running (see Section 2.6.2, ''Objects Using the Cluster Alias Node Identifier'').
Messages that result from the use of certain system service calls (including optional user data carried on logical link creation or termination)
Interrupt messages
Logical link status messages
Network system messages
Nontransparent functions that indirectly cause mailbox messages to be placed in the receiver's mailbox include calls for initiating, completing and terminating logical links. Figure 8.1, ''Mailbox Messages'' illustrates how nontransparent tasks use mailboxes.
Table 8.3, ''System Mailbox Messages'' for a detailed description of mailbox messages.
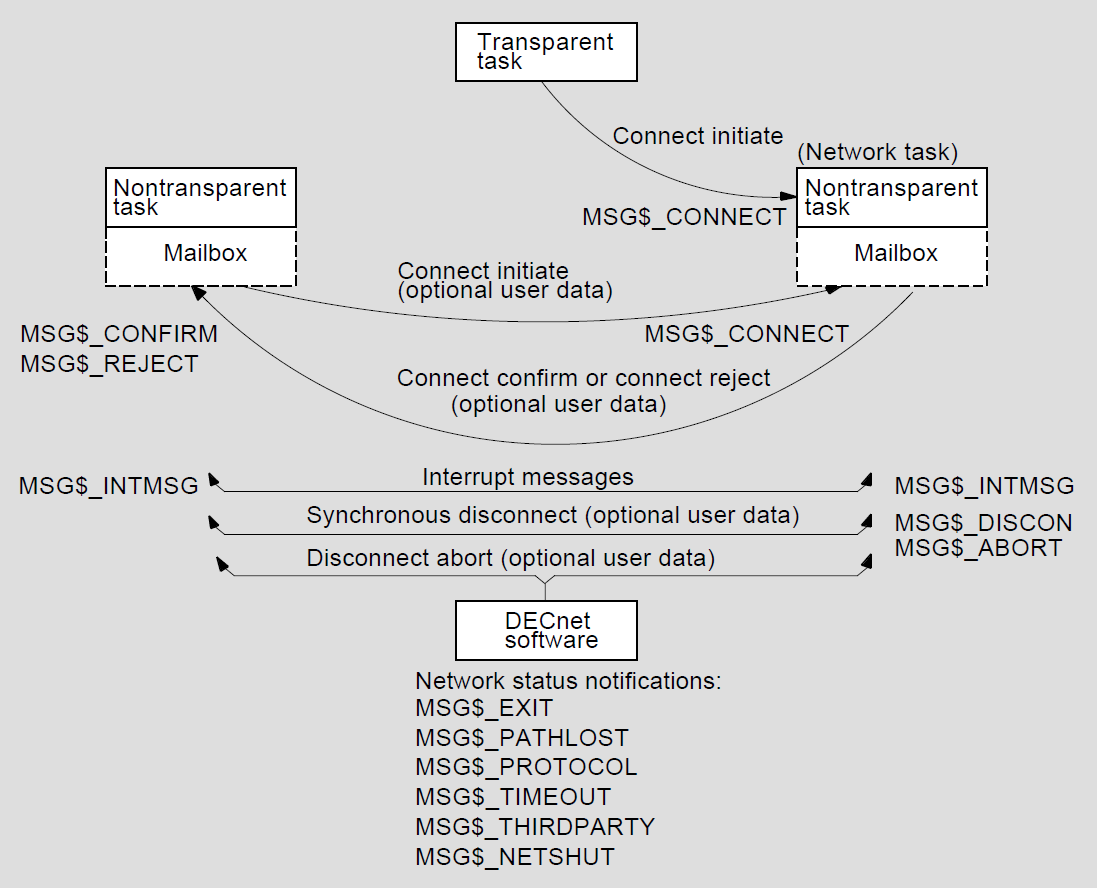
A nontransparent task can receive network status notifications in the mailbox.
Third-party disconnections
Network software- and hardware-related problems
Processes exiting before I/O completion
Connection request timeouts
8.4.2. Task Specification Strings in Task-to-Task Applications
Whether you are performing a transparent or nontransparent task-to-task operation, you must use a task specification string to identify the remote task with which you want to communicate. A task specification string is a quoted string that identifies the target task to which you attempt a logical link connection.
"TASK= task name"
"0= task name"
|
taskname |
Can be from 1 to 16 characters. |
Note that "0" and "TASK" are equivalent. (If the remote node is not a VMS system, the maximum length of the task name may be different.)
If the remote node is running the OpenVMS operating system, the taskname usually represents the file name of a command procedure to be executed at the remote node. The taskname may also represent a specific image to be run. The command procedure invoked at the remote node can complete the logical link itself (using a DCL OPEN command), or it can include a DCL RUN command to execute a program that completes the logical link.
BOSTON::"TASK=TEST2" BOSTON"SMITH JOHN"::"0=TEST2"
In this example, TEST2 refers to SYS$LOGIN:TEST2.COM for the network process at the remote OpenVMS node. Only the file name component of the command file specification is used in the task name string in this example. When naming the target task in the object database, you can specify a more complete file specification. For example, you can include a device name or a file type.
8.4.3. Functions Required for Performing Task-to-Task Operations
Several functions are necessary for performing a task-to-task operation. The number of functions, of course, depends on whether you intend to access the network transparently or non transparently.
- Initiating a logical link connection
Requesting a logical link to a remote task ?
Declaring a network name and processing multiple connection requests
- Completing a logical link connection
Rejecting a logical link connection request
Accepting a logical link connection request ?
- Exchanging messages
Sending and receiving data messages ?
Sending and receiving interrupt messages
- Terminating a logical link
Synchronously disconnecting the logical link
Aborting the logical link ?
Nontransparent tasks can use any or all of these functions to extend the basic capabilities offered under transparent communication.
8.4.3.1. Initiating a Logical Link Connection
Whether you access the network transparently or nontransparently, you must establish a communication link to the remote node on which the target task runs before any message exchange can take place. You establish the link by issuing a source task call that requests a logical link connection. (The source task is the task that initiates a logical link connection request; the target task is the task with which you want to communicate.)
An I/O channel. The I/O channel (more commonly referred to as the channel) serves as the path over which messages are sent and received by the source task.
The identification of the target node. Every node in a network has an identifier that distinguishes it from all other nodes in the network. Transparent communication uses a task specification string to indicate the name of the target node. Nontransparent communication requires a user-generated data structure called the network connect block (NCB), which also includes a task specification string.
An object type descriptor.
Access control information (optional).
Optional user data. Nontransparent tasks have the option of sending up to 16 bytes of data to the target task (see the following information about NCBs).
You should be aware that after you issue a call that uses either a task specification string or an NCB, you access the network and, by definition, the DECnet for OpenVMS software.
8.4.3.2. Completing the Logical Link Connection
As part of the handshaking sequence, the target task completes the logical link connection in two steps. First, the DECnet software at the remote node processes the inbound logical link connection request. Second, the target task either accepts or rejects the link. These steps are performed differently, depending on whether the target task uses transparent or nontransparent I/O.
When a logical link request is received, a procedure called NETSERVER.COM is executed, which in turn invokes the image NETSERVER.EXE. This program works in conjunction with the network ACP (NETACP) to invoke the image or command procedure defined for the requested object.
When the logical link is terminated, the ‘‘object’’ program also terminates. This process, however, is not deleted. Instead, control is returned to NETSERVER.EXE, which waits for another incoming logical link request. NETSERVER.EXE waits until it encounters a timeout condition (the default is 5 minutes).
The system manager can specify the time that NETSERVER waits for another logical link request. The logical name NETSERVER$TIMEOUT, when defined, determines the amount of time NETSERVER waits before reaching the timeout condition. Note that the equivalence name must be in the standard VMS delta time format, for example, 0:10:0, representing 10 minutes.
You may define a number of NETSERVER processes that never time out. This is useful on systems that are the target of significant amounts of network activity, such as mail or public file access. Two benefits may be gained: improved response time for the user initiating the network access, because there is no waiting for a new process to be created, and reduced overhead on the target system by virtue of fewer process creations.
$ DEFINE NETSERVER$SERVERS_NML$SERVER 2
Note
The use of DECnet object accounts like NML$SERVER and MAIL$SERVER are described in Section 2.6.1, ''DECnet for OpenVMS Objects'' and Section 5.2.2, ''Using NETCONFIG.COM''.
Put this command in the login command procedure of the account; in this case, the SYS$LOGIN directory for NML$SERVER. You can also define it as a system logical name in SYS$MANAGER:SYLOGICALS.COM. The account must have write access to its SYS$LOGIN directory. Note that you gain little by defining only one permanent server, because a number of functions such as wildcard file copy require multiple logical links, each of which requires its own server.
If you use this mechanism, you should understand the interaction between proxy access and NETSERVER processes. The proxy database is read by LOGINOUT.EXE, after a process has been created. For this reason, any incoming connection that may have a proxy account on the local system will not be given to an existing NETSERVER process that was created for a different user. Permanent servers, in general, can be used only by logical links that are not using proxy access.
In the following discussion, the remote node is assumed to be a VMS operating system. If the remote node on which your target task runs is not a VMS operating system, you should refer to the DECnet documentation for that system.
Completing the Connection Transparently
If the target task is transparent, the DECnet software at the remote node checks the access control information supplied in the connection request call.
Before you access the remote node, the system manager must have created the appropriate account in the UAF (refer to the information on access control). In addition, the command procedure file (task name.COM ) starting the remote task must exist in the default directory associated with the account identified by the access control information. For a description of the command procedure task name.COM, see Section 8.7.1, ''DCL Command Procedure for Task-to-Task Communication'', which contains examples of command procedures designed for task-to-task communication.
Command procedures for objects existing in the OBJECT database (which is created using NCP commands) are located in the SYS$SYSTEM directory. The VSI-supplied FAL.COM procedure is an example of such a command procedure. (Note that the object command procedure is bypassed if the object definition specifies an EXE file.)
Completing the Connection Nontransparently
If the target task is nontransparent, then one of several things may occur. If the task has not declared itself a network task (and is therefore eligible to accept only one connection request at a time), then the DECnet software at the remote node performs the access checking procedure. After it starts, the target task retrieves the connection information by translating the logical name SYS$NET using the $TRNLNM system service call (see Section 8.6, ''Performing Nontransparent Task-to-Task Operations'').
If the target task declares itself as an active network task, then DECnet for OpenVMS software places all connection requests addressed to the task in the mailbox associated with the channel being used. The first message in the mailbox is the NCB from the original connection request that started the task. This message appears in the mailbox after channel assignment and name declaration occur. After the task declares a network name or number, subsequent inbound connection requests are not checked by the remote node to verify access control. (Note that if the task is started without being part of a DECnet operation, access control is never checked.) Section 8.6, ''Performing Nontransparent Task-to-Task Operations'' describes in more detail the nontransparent process of completing the logical link connection.
After examining the incoming connection request, the target task either accepts or rejects the request, and optionally can send 1 to 16 bytes of data back to the source task at the same time that it responds to the logical link connection request. Furthermore, a library routine,LIB$ASN_WTH_MBX, which assigns a channel and associates a unique mailbox, can be used when accepting the connection.
8.4.3.3. Exchanging Messages
When you access the network transparently or nontransparently, DECnet for OpenVMS sends data messages over a logical link in response to a set of send and receive calls issued by the source and target tasks. For higher-level language tasks, use standard read and write statements to send and receive data messages. (In Example 8.1, ''FORTRAN Task-to-Task Communication'', the two FORTRAN tasks use READ and WRITE statements to exchange information. The equivalent RMS service calls are $GET and $PUT.)
After DECnet for OpenVMS creates a logical link, the two tasks are ready to exchange messages. This exchange can take place only if the two tasks cooperate in the transmission process. In other words, for each message sent by a task, the receiving task must issue a corresponding call to receive the message. Also, you must decide which task will disconnect the link. In addition, if the tasks are nontransparent, they must agree on whether or not the optional data will be passed. In the context of an established logical link, the task sending a message is the transmitter and the task receiving it is the receiver. Because logical links are inherently full duplex, each task may be a transmitter and a receiver simultaneously.
DECnet for OpenVMS distinguishes between two types of message: data messages and mailbox messages. Data messages are the normal mode of information exchange for both transparent and nontransparent communication. Mailbox messages such as interrupt messages, messages resulting from some DECnet operation (including optional user data), and network status notifications, can be used only in nontransparent communication.
- Messages that DECnet generates when the task initiates certain network operations. A VMS task issues system service calls to initiate these operations. For example:
When one task requests a logical link connection, a notification message (and optional user data) may be placed in the mailbox of the target task.
When a target task accepts or rejects the logical link connection request, a notification message (and optional user data) is placed in the mailbox of the source task.
When one task synchronously disconnects or aborts a logical link, a notification message (and optional user data) is placed in the mailbox of the task from which it is disconnecting.
Network status notification messages that inform a task of some unusual network occurrence (such as a third-party disconnect).
Interrupt messages sent by the other task.
8.4.3.4. Terminating a Logical Link Connection
The termination of a logical link signals the end of the communication between tasks.
In transparent communication using programming language I/O statements, RMS service calls, or system service calls, either task can break the link. To terminate the link properly, the receiver, and not the transmitter, of the final message should issue the $CLOSE service or other appropriate language call to break the link. The link termination process is complete when the other task issues a link termination request. In transparent communication using system service calls, the $DASSGN system service call causes the link to be terminated.
Issuing the $CANCEL service call followed by the $DASSGN service call causes all pending operations to abort, then closes the link and deassigns the channel.
Synchronous Disconnect ($QIO)—Specifies that all messages sent by the local task are required to be received and acknowledged by the remote End Communication Layer (ECL) before the logical link is disconnected. Use this type of disconnect when the user of the logical link’s services wants to ensure that the transmission of messages has completed before terminating the logical link. This service, however, cannot guarantee the delivery of the data received by the remote ECL to the remote task.
Disconnect Abort ($QIO)—Specifies that all messages sent by the local task are not required to be received or acknowledged by the remote ECL before the logical link is disconnected. Use this type of disconnect when the local task wants to reset the logical link to a known state. To ensure that the transmitted messages have been received and acknowledged by the remote ECL, the local task may issue the system service $CANCEL on the channel before issuing the disconnect abort. These services, however, cannot guarantee the delivery of the data received by the remote ECL to the remote task.
Deassign Channel and Terminate Link ($DASSGN)—Specifies that all messages sent by the local task are not required to be received or acknowledged by the remote ECL before the logical link is disconnected. Link and deassign the channel to the network immediately.
Note that after either a synchronous disconnect or a disconnect abort of a nontransparent link, you can issue a new connection request because you did not deassign the I/O channel but merely deaccessed the link. For further information about these system service calls, see Section 8.6, ''Performing Nontransparent Task-to-Task Operations''.
When a connection to a nontransparent task terminates the connection, a notification message indicating that the link is disconnected is placed in the mailbox of the affected task. A nontransparent task can send up to 16 bytes of optional user data, with the disconnect request. This optional user data is placed in the mailbox of the nontransparent task on the receiving end of the disconnect message.
Disconnect operations cannot guarantee to both partners that communication is complete. Therefore, VSI recommends that the communicating tasks agree on a protocol for terminating communication. In general, the receiver, not the transmitter, of the final message should disconnect the logical link.
Transparent communication allows you to create a logical link between tasks, send and receive data messages, and terminate the logical link at the end of the message dialog. The discussion covers general concepts implicit in DECnet for OpenVMS task-to-task communication and assumes familiarity with the QIOrelated material in the VSI OpenVMS System Services Reference Manual. The use of programming language I/O statements and RMS service calls in transparent task-to-task communication is described in Section 8.5, ''Performing Transparent Task-to-Task Operations''.
8.5. Performing Transparent Task-to-Task Operations
Any higher-level language that supports network operations using language I/O statements
RMS service calls
System service calls
DCL commands
See Section 8.7, ''Designing Tasks'' for examples of transparent task-to-task operations.
8.5.1. Using DCL Commands and Command Procedures
To perform transparent task-to-task operations, you can use DCL commands to construct and execute command procedures.
$ TYPE TRNTO"BROWN JUNE"::"TASK=SHOWBQ"
See Section 8.7.1, ''DCL Command Procedure for Task-to-Task Communication'' for an example of a command procedure used for task-to-task communication. For additional information concerning the design, construction, and execution of command procedures, see the VSI OpenVMS User's Manual.
8.5.2. Using Programming Language I/O Statements
This section contains examples of programming language I/O statements that provide transparent task-to-task communication. Each programming language I/O statement contains a task specification string as part of its statement.
|
FORTRAN |
OPEN(UNIT=7,NAME= ’TRNTO:: "TASK=TEST4 " ’,TYPE= ’NEW ’) |
|
BASIC |
OPEN ’TRNTO:: "TASK=TEST4 " ’AS FILE #7 |
|
PL/I |
OPEN FILE(OUTPUT) TITLE( ’TRNTO:: "TASK=TEST4 " ’); |
|
PASCAL |
OPEN(PARTNER, ’TRNTO:: "TASK=TEST4 " ’,NEW); |
|
COBO |
SELECT PARTNER ASSIGN TO "TRNTO:: " "TASK=TEST4 " " ".OPEN OUTPUT PARTNER. |
|
C |
F1 = OPEN( "TRNTO:: \ "TASK=TEST4 \ " ",2); |
|
FORTRAN |
OPEN(UNIT=2,NAME= ’SYS$NET ’,TYPE= ’OLD ’) |
|
BASIC |
OPEN "SYS$NET " ASFILE #2 |
|
PL/I |
OPEN FILE(INPUT) TITLE( ’SYS$NET ’); |
|
PASCAL |
OPEN(PARTNER, ’SYS$NET ’,OLD); |
|
COBOL |
SELECT PARTNER ASSIGN TO "SYS$NET ". OPEN INPUT PARTNER. |
|
C |
F2 = OPEN( "SYS$NET ",2); |
Section 8.7.2, ''FORTRAN Program for Task-to-Task Communication'' provides an example of a FORTRAN program designed for transparent task-to-task communication.
8.5.3. Using RMS Service Calls in MACRO Programs
You can write a program to perform transparent task-to-task communications, using RMS service calls. This section describes how to use RMS service calls in a program. All examples are written in the C programming language.
Note that the RMS $OPEN statement is equivalent to the higher-level language statements described in Section 8.5.2, ''Using Programming Language I/O Statements''.
target_fab = cc$rms_fab; target_rab = cc$rms_rab; char target_task[21] = "NODE::\" TASK=TEST4\" "; target_fab.fab$b_fac = FAB$M_GET | FAB$M_PUT; target_fab.fab$l_fna = &target_task; target_fab.fab$b_fns = sizeof (target_task); target_fab.fab$b_org = FAB$V_ORG; target_fab.fab$b_rat = FAB$M_CR; target_fab.fab$b_rfm = FAB$C_VAR; target_rab.rab$l_fab = &target_fab; target_rab.rab$l_ubf = &target_data; target_rab.rab$l_rbf = &target_data; target_rab.rab$w_rsz = sizeof ( target_data ); target_rab.rab$w_usz = sizeof ( target_data ); return_status = sys$open ( &target_fab );
req_fab = cc$rms_fab; req_rab = cc$rms_rab; char req_task[8] = "SYS$NET"; req_fab.fab$b_fac = FAB$M_GET | FAB$M_PUT; req_fab.fab$l_fna = &req_task; req_fab.fab$b_fns = sizeof (req_task); req_fab.fab$b_org = FAB$V_ORG; req_fab.fab$b_rat = FAB$M_CR; req_fab.fab$b_rfm = FAB$C_VAR; req_rab.rab$l_fab = &req_fab; req_rab.rab$l_ubf = &req_data; req_rab.rab$l_rbf = &req_data; req_rab.rab$w_rsz = sizeof ( req_data ); req_rab.rab$w_usz = sizeof ( req_data ); return_status = sys$open ( &req_fab );
AAs in the case of the target task, the appropriate FABs and RABs must already be declared. On inbound connections, DECnet for OpenVMS defines SYS$NET.
8.5.4. Using System Service Calls in MACRO Programs
You can write programs to perform transparent task-to-task communications, using system service calls. This section focuses on programs using system service calls for performing these operations.
|
Call |
Function |
|---|---|
|
$ASSIGN |
Request a logical link connection |
|
$DASSGN |
Terminate a logical link |
|
$QIO (IO$_READVBLK) |
Receive a message |
|
$QIO (IO$_READVBLK!IO$M_MULTIPLE) |
Receive a message in multiple receive requests |
|
$QIO (IO$_WRITEVBLK) |
Send a message |
|
$QIO (IO$_WRITEVBLK!IO$M_MULTIPLE) |
Send a message in multiple write requests |
These calls allow you to perform task-to-task communication in much the same way as you would perform normal I/O operations. Use the $ASSIGN call to assign a logical link I/O channel to a device, which in this case is a task that behaves like a full-duplex record-oriented device. You can perform read and write operations with this task either synchronously or asynchronously. To exchange messages, use the Queue I/O (QIO) requests supported by DECnet for OpenVMS. When all communication completes, use the $DASSGN system service call to deassign the channel and thereby disconnect the logical link.
8.5.4.1. Requesting a Logical Link
To request a logical link and assign an I/O channel, use the $ASSIGN system service. When you issue this call, you must include a task specifier for the remote node on which the cooperating task runs. The task specifier identifies the remote node and the target task to which you want to establish a logical link.
short int netchan; static $DESCRIPTOR ( target, "TRNTO::\" TASK=TEST2\" "); return_status = sys$assign ( &target, &netchan );
For debugging or for symmetry, you can develop and run the target task on the local node. Use the local node name (or node number 0) plus two colons to connect to the local node. This practice applies to DCL, higher-level languages and RMS, as well as system services.
After you establish a logical link, you refer to the assigned channel in any succeeding call in the program, either to send or receive messages, or to deassign the channel and terminate the logical link.
Until the connection operation completes, the process is in local event flag wait (LEF) state in kernel mode. Therefore, pressing CTRL/Y does not return the process to DCL status. The maximum amount of time that the process will wait in this state is specified by the OUTGOING TIMER parameter of the NCP command SET EXECUTOR. If this timer cannot be set to an acceptable value, tasks that accept commands from the terminal should use $QIO (IO$_ACCESS) instead of the transparent $ASSIGN call to initiate logical links.
8.5.4.2. Completing the Logical Link Connection
The target task completes the logical link by calling the SYS$ASSIGN system service The arguments include:
The device name ("_NET:")
The channel number which will be returned by SYS$ASSIGN
The target task completes the logical link by calling the SYS$ASSIGN system service with SYS$NET specified as the devnam argument. For example:
static $DESCRIPTOR ( net_device, "_NET:" ); short int netchan; return_status = sys$assign( &net_device, &netchan, 0, 0);
8.5.4.3. Exchanging Messages
After DECnet for OpenVMS software establishes a logical link with the target task, either task can then send or receive messages. However, they must cooperate with each other: for each message sent with the $QIO (IO$_WRITEVBLK), the other task must issue a corresponding $QIO (IO$_READVBLK) to receive the message.
On logical links, DECnet for OpenVMS supports sending and receiving data messages that are larger than the maximum size allowed by the $QIO system service. You do this by allowing write and read requests to be fragmented across multiple $QIO requests. To fragment writes and reads, you must include the modifier IO$M_MULTIPLE on the write or read $QIO call.
When you supply the modifier on a write message request $QIO (IO$_WRITEVBLK!IO$M_MULTIPLE), it indicates that more data will be supplied for this message. To indicate the last fragment of the message being sent, you should issue the write request without a modifier $QIO (use the QIO called IO$_WRITEVBLK).
When you supply the modifier on a read message $QIO (IO$_READVBLK!IO$M_MULTIPLE), if the received data message contains more than enough data to fill the buffer supplied with the read request, then SS$_BUFFEROVF is returned. This is not an error status. The next read posted receives the next fragment of the data message. If the received message fits into the buffer posted, then SS$_NORMAL is returned. Tasks that require fragmentation should always supply the IO$M_MULTIPLE on read requests.
If you do not use the read multiple request to receive a data message, then you must ensure that the tasks allocate enough buffer space for receiving the messages. If the tasks do not, a SS$_DATAOVERUN error occurs. You must also ensure that the end of the dialog can be determined.
One of the two tasks must disconnect the logical link. To terminate a logical link properly, the receiver, and not the transmitter, of the final message should break the link.
DECnet for OpenVMS does not provide an automatic timeout of read or write requests. If the task needs to stop a read or write request on a logical link, then it must do so by disconnecting or aborting the logical link.
8.5.4.4. Terminating the Logical Link
Use the $DASSGN system service call to deassign the channel and break off the logical link with the cooperating task. This call terminates all pending calls for sending and receiving messages, aborts the link immediately, and frees the channel associated with that logical link.
8.5.4.5. Status and Error Reporting
When a system service completes execution, a status value is returned (does not apply to the $EXIT service). The $ASSIGN, $DASSGN, and $QIO system services place the return status information in register 0 (R0). For the $QIO system service, a successful return status indicates only that the request was queued successfully. All I/O completion status information is placed in the I/O status block (IOSB). For example, a $QIO system service read request to a task might be successful (status return is SS$_NORMAL) yet fail because the link was disconnected. (I/O status return is SS$_LINKABORT.) The return status codes shown in the following sections may be returned both in R0 and in the IOSB.
When DECnet for OpenVMS returns the status SS$_NORMAL in the I/O status block on a write request, it means that the write was queued for transmission on the logical link. It does not mean that the write request has been received or acknowledged by the remote task. The logical link services of DECnet for OpenVMS provide the guaranteed delivery of transmitted messages to the remote node. If a message cannot be delivered, the user is notified by the disconnection of the logical link. The DECnet for OpenVMS services cannot guarantee the delivery of data received on the remote node to the remote task. It is the responsibility of cooperating tasks to agree on a protocol to ensure that data transmitted by the local task is received by the remote task.
The VSI OpenVMS System Services Reference Manual and the VSI OpenVMS Programming Concepts Manual both provide more information about $QIO system services.
8.5.5. Summary of System Service Calls for Transparent Operations
The following sections describe the system services that provide transparent taskto- task communication. Each description covers the use of the call, its format, the arguments associated with the call, and the return status information. For descriptions of NCP system messages, refer to the OpenVMS system messages documentation. You can use the DCL command HELP/MESSAGE to obtain online descriptions of system messages.
8.5.5.1. $ASSIGN
The $ASSIGN system service assigns a channel to refer to the logical link. You can then use the channel returned in the chan argument in any succeeding call to send or receive a message, or to deassign the channel and thereby terminate the logical link.
Format
$ASSIGN devnam ,chan ,[acmode]
Arguments
|
devnam |
Address of a quadword descriptor of a
character string that identifies the remote task.
The string contains either of the following:
|
|
chan |
Address of a word that is to receive the assigned channel number. You use this channel number to send a message to a remote task, receive a message from a remote task, or to abort the logical link. |
|
acmode |
Access mode to be associated with this channel. The most privileged access mode used is the access mode of the caller. You can perform I/O operations on the channel only from equal or more privileged access modes. |
Return Status
|
SS$_CONNECFAIL |
The connection to a network object timed out or failed. |
|
SS$_DEVOFFLINE |
The physical link is shutting down. |
|
SS$_FILALRACC |
A logical link already exists on the channel. |
|
SS$_INSFMEM |
There is not enough system dynamic memory to complete the request. |
|
SS$_INVLOGIN |
The access control information was found to be invalid at the remote node. |
|
SS$_IVDEVNAM |
The task specifier has an invalid format or content. |
|
SS$_LINKEXIT |
The network partner task was started, but exited before confirming the logical link (that is, $ASSIGN to SYS$NET). |
|
SS$_NOLINKS |
No logical links are available. The maximum number of logical links as set for the NCP executor MAXIMUM LINKS parameter was exceeded. |
|
SS$_NOPRIV |
The issuing task does not have the required privilege to perform network operations or to confirm the specified logical link. |
|
SS$_NOSUCHNODE |
The specified node is unknown. |
|
SS$_NOSUCHOBJ |
The network object number is unknown at the remote node; or for a TASK= connect, the named DCL command procedure file cannot be found at the remote node. |
|
SS$_NOSUCHUSER |
The remote node could not recognize the login information supplied with the connection request. |
|
SS$_PROTOCOL |
A network protocol error occurred, most likely because of a network software error. |
|
SS$_REJECT |
The network object rejected the connection. |
|
SS$_REMOTE |
The service completed successfully. (A logical link was established with the target task.) |
|
SS$_REMRSRC |
The link could not be established because system resources at the remote node were insufficient. |
|
SS$_SHUT |
The local or remote node is no longer accepting connections. |
|
SS$_THIRDPARTY |
The logical link connection was terminated by a third party (for example, the system manager). |
|
SS$_TOOMUCHDATA |
The task specified too much optional or interrupt data. |
|
SS$_UNREACHABLE |
The remote node is currently unreachable. |
8.5.5.2. $QIO (Sending a Message to a Target Task)
The $QIO system service with a function code of IO$_WRITEVBLK or IO$_WRITEVBLK!IO$M_MULTIPLE sends a message to a target task. The $QIO call initiates an output operation by queuing a request to the channel associated with the logical link. Alternatively, you could use the $QIOW system service to perform the same operation but also wait for I/O completion.
Format
$QIO [efn] ,chan ,func ,[iosb] ,[astadr] ,[astprm] ,p1 ,p2$QIOW
Arguments
|
efn |
Number of the event flag to be set at request completion. |
|
chan |
Word containing the channel number associated with the logical link. Use the same channel number returned in the $ASSIGN call. |
|
func |
IO$_WRITEVBLK or IO$_WRITEVBLK!IO$M_MULTIPLE. |
|
iosb |
Address of a quadword I/O status block that is to receive the completion status. |
|
astadr |
Entry point address of an asynchronous system trap (AST) routine that executes when the I/O operation completes. If specified, the AST routine executes at the access mode from which the $QIO service was requested. |
|
astprm |
AST parameter to be passed to the AST completion routine. |
|
p1 |
Buffer address. |
|
p2 |
Buffer length in bytes. |
Return Status
|
SS$_NORMAL |
The service completed successfully. |
|
SS$_ABORT |
The I/O request has been aborted by a $DASSGN or $CANCEL call. |
|
SS$_CANCEL |
The I/O on this channel has been canceled. |
|
SS$_FILNOTACC |
No logical link is associated with the channel. |
|
SS$_INSFMEM |
Enough memory to buffer the message could not be allocated. |
|
SS$_LINKABORT |
The network partner task aborted the logical link. |
|
SS$_LINKDISCON |
The network partner task disconnected the logical link. |
|
SS$_LINKEXIT |
The network partner task exited. |
|
SS$_PATHLOST |
The path to the network partner task node was lost. |
|
SS$_PROTOCOL |
A network protocol error occurred. This is most likely due to a network software error. |
|
SS$_THIRDPARTY |
The logical link connection was terminated by a third party (for example, the system manager). |
Reference the VSI OpenVMS System Services Reference Manual for more information on $QIO and the associated arguments.
8.5.5.3. $QIO (Receiving a Message from a Target Task)
The $QIO system service with a function code of IO$_READVBLK receives a message from a target task. The $QIO call initiates an input operation by queuing a request to the channel associated with the logical link. Alternatively, you could use the $QIOW system service to perform the same operation but also wait for I/O completion.
Format
$QIO [efn] ,chan ,func ,[iosb] ,[astadr] ,[astprm] ,p1 ,p2 $QIOW
Arguments
|
efn |
Number of the event flag to be set at request completion. |
|
chan |
Word containing the channel number associated with the logical link. Use the same channel number returned in the $ASSIGN call. |
|
func |
IO$_READVBLK or IO$_READVBLK!IO$M_MULTIPLE. |
|
iosb |
Address of a quadword I/O status block that is to receive the completion status. |
|
astadr |
Entry point address of an AST routine that executes when the I/O operation completes. If specified, the AST routine executes at the access mode from which the $QIO service was requested. |
|
astprm |
AST parameter to be passed to the AST completion routine. |
|
p1 |
Buffer address. |
|
p2 |
Buffer length in bytes. |
Return Status
|
SS$_NORMAL |
The service completed successfully. |
|
SS$_ABORT |
The I/O request has been aborted by a $DASSGN or $CANCEL call. |
|
SS$_CANCEL |
The I/O on this channel has been canceled. |
|
SS$_DATAOVERUN |
More bytes were sent than could be received in the supplied buffer. This status will not be returned when IO$M_MULTIPLE is used on the read request. |
|
SS$_FILNOTACC |
No logical link is associated with the channel. |
|
SS$_INSFMEM |
Enough memory to buffer the message could not be allocated. |
|
SS$_LINKABORT |
The network partner task aborted the logical link. |
|
SS$_LINKDISCON |
The network partner task disconnected the logical link. |
|
SS$_LINKEXIT |
The network partner task exited. |
|
SS$_PATHLOST |
The path to the network partner task node was lost. |
|
SS$_PROTOCOL |
A network protocol error occurred. This is most likely due to a network software error. |
|
SS$_THIRDPARTY |
The logical link connection was terminated by a third party (for example, the system manager). |
|
SS$_BUFFEROVF |
Data could not fit in the buffer supplied. Supply another read request to receive the next fragment of received data message. |
Reference the VSI OpenVMS System Services Reference Manual for more information on $QIO and the associated arguments.
8.5.5.4. $DASSGN (Disconnecting a Logical Link)
The $DASSGN system service terminates all pending operations to send and receive data, disconnects the logical link immediately, and frees the channel associated with that link. Either task can terminate the logical link by calling $DASSGN.
Format
$DASSGN chan
Argument
|
chan |
Word containing the channel number to the logical link you want disconnected. Use the same channel number returned in the $ASSIGN call. |
Return Status
|
SS$_NORMAL |
The service completed successfully. |
|
SS$_IVCHAN |
The process specified an invalid channel. |
|
SS$_NOPRIV |
The specified channel was not assigned or was assigned from a more privileged access mode. |
Reference the VSI OpenVMS System Services Reference Manual for more information on $QIO and the associated arguments.
8.6. Performing Nontransparent Task-to-Task Operations
This section describes the system service calls and functions that you use for nontransparent task-to-task communication. In general, the principles of nontransparent task-to-task communication are similar to those of transparent communication.
If you want to perform nontransparent task-to-task communication operations, you can write programs using system services in one of the higher-level languages, provided the language supports the use of system services.
Creating and using mailboxes for receiving messages, including network status notifications
Declaring a task as a network task, thus enabling it to process multiple inbound logical link connection requests
Sending connection requests, optionally with user data
Accepting or rejecting a connection request, optionally with user data
Communicating between a transparent and a nontransparent task
Sending or receiving an interrupt message
Aborting or synchronously disconnecting a logical link, optionally with user data
The general concepts implicit in DECnet for OpenVMS task-to-task communication are covered in Section 8.5, ''Performing Transparent Task-to-Task Operations''. You should also be familiar with the material in the VSI OpenVMS System Services Reference Manual and the VSI OpenVMS I/O User's Reference Manual.
8.6.1. Using System Services for Nontransparent Operations
|
Call |
Function |
|---|---|
|
$ASSIGN |
Assign an I/O channel |
|
$CANCEL |
Cancel I/O on a channel |
|
$CREMBX |
Create a mailbox |
|
$DASSGN |
Abort the logical link connection (deassigning an I/O channel) |
|
$GETDVI |
Get information on device or volume |
|
$QIO (IO$_ACCESS) |
Request a logical link connection |
|
$QIO (IO$_ACCESS) |
Accept a logical link connection request |
|
$QIO (IO$_ACCESS!IO$M_ABORT) |
Reject a logical link connection request |
|
$QIO (IO$_ACPCONTROL) |
Assign a network name or number to a task eligible to accept multiple inbound connection requests |
|
$QIO (IO$_DEACCESS!IO$M_ABORT) |
Abort the logical link connection |
|
$QIO (IO$_DEACCESS!IO$M_SYNCH) |
Synchronously disconnect a logical link |
|
$QIO (IO$_READVBLK) |
Receive a message |
|
$QIO (IO$_READVBLK!IO$M_MULTIPLE) |
Receive a message in multiple receive requests |
|
$QIO (IO$_WRITEVBLK) |
Send a message |
|
$QIO (IO$_WRITEVBLK!IO$M_MULTIPLE) |
Write a message in multiple write requests |
|
$QIO (IO$_WRITEVBLK!IO$M_INTERRUPT) |
Send an interrupt message |
|
$TRNLNM |
Translate logical names |
8.6.1.1. Assigning a Channel to _NET: and Creating a Mailbox
To prepare for nontransparent task-to-task communication, you need to assign a channel just as you would for transparent communication. In addition, you can create a mailbox to take advantage of optional network protocol features.
You must assign a channel to the pseudodevice _NET:; use the $ASSIGN system service call for this purpose. This call normally contains a reference to a mailbox, thereby associating it with the channel assigned to _NET:. If you use a mailbox, you must create the mailbox before assigning a channel to _NET:. It is important to note that this use of the $ASSIGN system service differs from its use for transparent communication. Assigning a channel to _NET: does not transmit a logical link connection request to the remote node. Instead, the channel to _NET: provides a communication path to DECnet software. You must use a separate $QIO call (IO$_ACCESS function using the same channel) to request a logical link to the remote task. Refer to Section 8.6.2.1, ''$ASSIGN (I/O Channel Assignment)'' for details about the $ASSIGN system service.
To take advantage of optional network protocol features, create a mailbox to receive messages on behalf of logical link operations. For example, the mailbox receives a message indicating whether the cooperating task accepted or rejected a connection request issued by the source task. Use the $CREMBX system service to create a mailbox for these purposes. When you create the mailbox, you must specify the maximum message size adequate for the largest message expected, or DECnet will not be able to deliver messages. If your application does not need the information supplied in the mailbox, you need not create a mailbox.
For convenience, you can use the Run-Time Library routine LIB$ASN_WTH_MBX to create a temporary mailbox, assign a channel to it, and assign a channel to _NET:. This routine creates a unique mailbox on each call to the routine. Multiple copies of a task using this routine, in effect, use different mailboxes. If you were to create a mailbox with a logical name within the task, then all copies of that task would use the same mailbox and thereby interfere with each other's mailbox messages. For a complete description of this routine, see the VSI OpenVMS RTL Library (LIB$) Manual.
8.6.1.2. Mailbox Message Format
The mailbox receives information specific to nontransparent communication with a remote task. Figure 8.2, ''Mailbox Message Format'' illustrates the general format of the mailbox message.
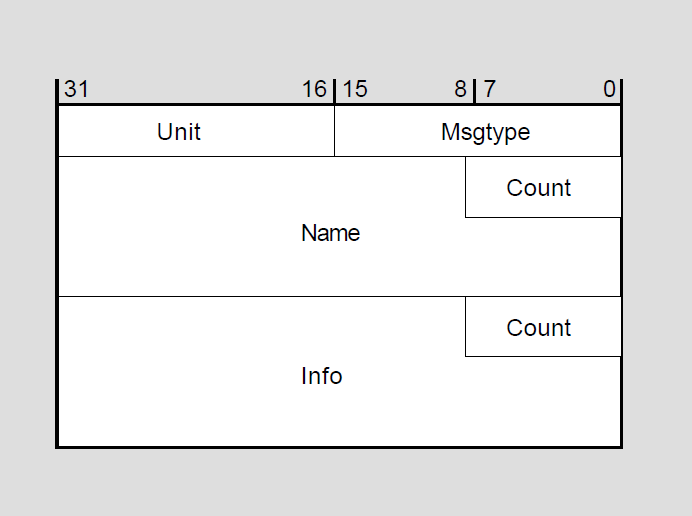
Notes on Figure 8.2, ''Mailbox Message Format''
|
MSGTYPE |
Contains a code that identifies the message type. |
|
UNIT |
Contains the binary unit number of the device for which the message applies. |
|
COUNT NAME |
Contains a counted ASCII string that gives the name of the device for which the message applies. The $ASSIGN system service creates devices having names beginning with NET. |
|
COUNT INFO |
Contains a counted ASCII string of information, which depends on the message type. |
MSG$_sender
|
Symbolic Name |
Meaning |
|---|---|
|
MSG$_TRMUNSOLIC |
Unsolicited terminal data |
|
MSG$_CRUNSOLIC |
Unsolicited card reader data |
|
MSG$_ABORT |
Network partner aborted link |
|
MSG$_CONFIRM |
Network connect confirm |
|
MSG$_CONNECT |
Network inbound connect initiate |
|
MSG$_DISCON |
Network partner disconnected; hang-up |
|
MSG$_EXIT |
Network partner exited prematurely |
|
MSG$_INTMSG |
Network interrupt message; unsolicited data |
|
MSG$_PATHLOST |
Network path lost to partner |
|
MSG$_PROTOCOL |
Network protocol error |
|
MSG$_REJECT |
Network connect reject |
|
MSG$_THIRDPARTY |
Network third party disconnect |
|
MSG$_TIMEOUT |
Network connect timeout |
|
MSG$_NETSHUT |
Network shutting down |
8.6.1.3. Requesting a Logical Link Connection
After you assign the I/O channel, you can request a logical link connection to the target task. Use the $QIO system service with a function code of IO$_ACCESS. You must identify the target task in the $QIO call. Use a network connect block (NCB) to specify the target task identification string. In addition, you can optionally send one to 16 bytes of data in the NCB. The format of the NCB is discussed in Section 8.6.1.4, ''Using the Network Connect Block''.
After the source task issues the connection request, it can issue a $QIO call with a function code of IO$_READVBLK to read its mailbox. Checking the contents of the mailbox is one way to determine whether the target task accepted or rejected the connection request. The mailbox can contain a variety of information, including either the MSG$_CONFIRM or MSG$_REJECT messages, and possibly optional data in the mailbox buffer.
If specified, the IOSB argument of the $QIO (IO$_ACCESS) call will also contain the result of the connection request operation. Section 8.6.2.2, ''$QIO (Requesting a Logical Link Connection)'' provides a complete list of I/O status messages for this call.
Note that you must read the mailbox to inspect any optional data sent from the target task upon accepting or rejecting the connection request.
8.6.1.4. Using the Network Connect Block
The network connect block (NCB) is a user-generated data structure that contains the information necessary to request a logical link connection or to accept or reject a logical link connection request. The NCB must be in read/write storage.
"TASK=TEST2" "0=TEST2" "157=" "TEST2="
For an inbound call, the contents of the task name portion of an NCB depends upon the remote DECnet implementation. If the remote node is running DECnet for OpenVMS, then the task name portion is a username. If not, then the task name portion is a system-specific string that identifies an executable unit (for example, job or task).
The task specification string must be enclosed in quotation marks. The final quotation mark of the task specification string follows the last item within the NCB. Section 8.4.2, ''Task Specification Strings in Task-to-Task Applications'' provides additional information about task specification strings.
The following example, written in the C programming language, shows an NCB you could use when issuing an outgoing connection request call.
NCB Example With Optional Data:
static char ncb[] = { ’T’, ’R’, ’N’, ’T’, ’O’ , ’:’, ’:’,
’"’, ’T’ , ’A’, ’S’, ’K’, ’=’,
’T’, ’E’, ’S’, ’T’, ’2’, ’"’ };For incoming connections, the NCB can be obtained by translating the SYS$NET logical name. The contents of an NCB for an incoming connection request is described below.
A valid node-id and task specification string.
The slash character (/).
One word. This word must be 0 for a connection request operation. For a connect accept or reject operation, this word contains an internal DECnet link identifier.
Up to 16 bytes of optional data sent as a counted string. This string is stored in a fixed-length field that is 17 bytes long. DECnet for OpenVMS software ignores unused bytes.
A destination descriptor. This descriptor indicates how the connection was issued and is meaningful only to the task or object to which the connection is made. This information is useful where one program serves many functions and needs to know how it was invoked. The maximum length for the destination descriptor is 19 bytes. The format is as follows:
If byte 0 contains 0, then byte 1 is the binary value of the object number.
If byte 0 contains 1, then byte 1 is the binary object number, and bytes 2 through 18 contain a counted task name.
If byte 0 contains 2, then byte 1 is the binary object number; bytes 2 through 5 contain a UIC, the first two bytes of which contain a binary group code and the second two bytes contain a binary user code; and bytes 6 through 18 contain a counted task name.
8.6.1.5. Completing the Establishment of a Logical Link
A nontransparent target task completes the logical link connection in one of several ways, depending upon whether the task can process multiple inbound connection requests or just a single request. Furthermore, a nontransparent target task has the option of accepting or explicitly rejecting a logical link request.
Receiving Connection Requests
This section describes what happens when you receive single and multiple connection requests from a remote node running DECnet for OpenVMS. If the target task’s remote node is not running DECnet for OpenVMS, please refer to the related DECnet documentation for that operating system.
When a remote node receives a call requesting a logical link, the DECnet for OpenVMS software constructs an NCB from the information contained in the call. At this point, one of two things occurs. If a task already running on the remote node has declared a network name or object number which is the same as the one identified in the constructed NCB, the software puts the NCB into that task’s mailbox. If not, DECnet for OpenVMS must create a process to execute the task. The DECnet for OpenVMS software either uses a compatible netserver process (if one exists) or creates a netserver process (if one does not already exist) to execute NETSERVER.COM, which in turn runs NETSERVER.EXE.
If the connection request identifies a numbered (nonzero) object, then the appropriate record is located in the configuration database and the name of the file is found in this record. (The file is assumed to reside in SYS$SYSTEM.)
If the connection request identifies a named object with type 0 (TASK), then the file name is assumed to be the name of the task connected to (with a file type of COM) and is assumed to reside in the default directory associated with the access control information.
When executing, the target task can determine whether to accept or explicitly reject the connection request. You can program the target task to base this assessment on the information contained in the NCB.
A nontransparent target task can accept only one connection request at a time, unless it declares itself as a network task. The target task may retrieve the connection information by translating the logical name SYS$NET using the $TRNLNM system service. After the task retrieves the logical name, it may decide whether to accept or explicitly reject the connection request.
The optional data in the network connect block
The identity of the connector
The descriptor by which the connection was made
A target task can accept multiple inbound connection requests only if it declares itself a known network task. To make this declaration, you must first use the $ASSIGN call to assign an I/O channel to _NET:. Then, use the $QIO system service with the function code IO$_ACPCONTROL to assign a network name or object number to the task, making it eligible to process multiple inbound connection requests. This system service requires SYSNAM privilege. You must associate a mailbox with the channel if a name or number is to be declared.
You should program tasks that have declared names or object numbers to terminate when their mailboxes receive a MSG$_NETSHUT message. You must restart such tasks when the network comes back up.
After you declare the target task as an active network task, DECnet places all connection requests addressed to the task in the mailbox associated with the channel over which the ACP control function was issued. The target task retrieves connection requests from the mailbox by issuing the $QIO system service call with the function code IO$_READVBLK. Note that the first message in the mailbox is the NCB from the original connection request that put the task into a state of execution. After the task declares a network name or object number, subsequent inbound connection requests are not checked for their access control information.
Note that you can start tasks that declare names or object numbers apart from the first inbound connection (that is, by a RUN command). However, if the network task is started separately from a DECnet operation, access control is never checked.
Accepting or Rejecting a Connection Request
The target task can either accept or reject a connection request. To accept a connection request, thus completing the logical link connection, use the $QIO system service with the function code IO$_ACCESS. To reject the connection request, use the $QIO system service with the function code IO$_ACCESS!IO$M_ABORT. When it either accepts or rejects the connection request, the target task can also send 1 to 16 bytes of optional data within a modified NCB back to the source task.
Exchanging Data Messages and Interrupt Messages
The exchange of data messages between the two cooperating tasks is performed in the same way for both nontransparent and transparent communication. (Refer to Section 8.5.4.3, ''Exchanging Messages'' for information about exchanging messages on DECnet for OpenVMS logical links.)
The exchange of interrupt messages applies only to nontransparent communication. Either task can send a 1- to 16-byte interrupt message. You can use this method to send a message to a target task outside the normal flow of data messages. DECnet for OpenVMS places the received interrupt message in the target task's mailbox. Use the $QIO system service with the function code IO$_WRITEVBLK!IO$M_INTERRUPT to send the interrupt message. If the target task needs to be notified that an interrupt message has been placed in its mailbox, then it should issue a $QIO system service read request to the mailbox. The task may also specify an AST on the $QIO request to cause the execution of a special routine to handle the received interrupt message. (AST routines are described in the VSI OpenVMS System Services Reference Manual. )
8.6.1.6. Disconnecting or Aborting the Logical Link
A nontransparent task can terminate communication with a remote task either by disconnecting the link (synchronous disconnect or disconnect abort) or by deassigning the channel. In the first instance, you can issue a new connection request on the same channel because you do not deassign it. If you specifically use the IO$_DEACCESS, as opposed to the $DASSGN method of terminating a link, you can send an optional message of 1 to 16 bytes of data with the $QIO call.
To disconnect a logical link synchronously, issue the $QIO system service with the function code IO$_DEACCESS!IO$M_SYNCH. The channel is then free for subsequent communication with either the same or a different remote task.
A synchronous disconnect may be useful for master/slave communication, in which one task always sends data and its partner task always receives data. If the receiving task is notified of a synchronous disconnection, then all the data that was sent has been received. (The sending task, on the other hand, is not guaranteed that its partner received the data.) Because this notification is the only guarantee provided by this operation, using this operation is discouraged in favor of a user-defined protocol to ensure completion of communication. In general, the receiver of the final message should break the logical link.
To abort the logical link, issue the $QIO system service with the function code IO$_DEACCESS!IO$M_ABORT. This type of disconnect indicates that all messages transmitted by the local transmitter may not have been received or acknowledged by the remote ECL before the logical link was disconnected. You should use this type of disconnect when the local task needs to reset the logical link to a known state. If the local task needs to ensure that the transmitted messages have been received and acknowledged by the remote ECL, the task can issue the system service $CANCEL on the channel before issuing the disconnect abort. Note that this does not guarantee the delivery of the received data to the remote task. It is the responsibility of cooperating tasks to agree on a protocol to ensure that the received data is delivered to the remote task.
Note that after either a synchronous disconnect or a disconnect abort, you can issue a new connection request if you did not deassign the I/O channel.
If you issue the $CANCEL system service to a channel over which a network name or object has been declared, the declaration is removed from the network database.
8.6.1.7. Terminating the Logical Link
You can issue the $DASSGN system service call to deassign the channel and terminate the logical link immediately. You issue the call only after all communication between the tasks is complete. The call releases the I/O channel, disassociates the mailbox from the channel, and terminates the logical link immediately. This operation is equivalent to using $CANCEL followed by $QIO IO$_DEACCESS!IO$M_ABORT.
The same status and error-reporting considerations apply to nontransparent as to transparent task-to-task communication. Refer to Section 8.5.4.5, ''Status and Error Reporting'' for information about status and error reporting.
8.6.2. System Service Calls for Nontransparent Operations
The following sections describe the VMS system services you can use for nontransparent task communication over the network. Each description covers the use of the call, its format, the arguments associated with the call, and the return status information. The OpenVMS System Messages and Recovery Procedures Reference Manual lists the entire set of network system service error messages.
$CANCEL (Cancel I/O on Channel)
$CREMBX (Create Mailbox and Assign Channel)
$GETDVI (Get Device/Volume Information)
After you issue a $CANCEL on a DECnet for OpenVMS logical link, the only valid operation is to disconnect or abort the logical link.
8.6.2.1. $ASSIGN (I/O Channel Assignment)
The $ASSIGN system service assigns a channel to refer to a logical link. You use this channel in all $QIO calls that communicate with a remote task. In addition, you can use the $ASSIGN system service call to associate a mailbox with the channel.
Format
$ASSIGN devnam ,chan ,[acmode] ,[mbxnam]
Arguments
|
devnam |
Address of a quadword descriptor of a character string containing the string _NET: or a logical name for _NET:. |
|
chan |
Address of a word that is to receive the assigned channel number. |
|
acmode |
Access mode to be associated with this channel. The most privileged access mode used is the access mode of the caller. You can perform I/O operations on the channel only from equal or more privileged access modes. |
|
mbxnam |
Address of a character string descriptor for the physical name of the mailbox to be associated with the channel. This mailbox remains associated with the channel until the channel is deassigned ($DASSGN). |
Return Status
|
SS$_NORMAL |
The service completed successfully. |
|
SS$_INSFMEM |
There is not enough system dynamic memory to complete the request. |
|
SS$_NOPRIV |
The issuing task does not have the required privileges to create the channel. |
|
SS$_NOSUCHDEV |
The network device driver is not loaded (for example, the DECnet for OpenVMS software is not running currently on the local node). |
8.6.2.2. $QIO (Requesting a Logical Link Connection)
The $QIO system service with the function code IO$_ACCESS requests a logical link connection to a target task. You can send 1 to 16 bytes of optional data to the target task at the same time that you issue the $QIO system service.
Format
$QIO [efn] ,chan ,func ,[iosb] ,[astadr] ,[astprm] ,[p1] ,p2
Arguments
|
efn |
Number of the event flag to be set at request completion. |
|
chan |
Channel number associated with the logical link. Use the same channel number returned in the $ASSIGN call. |
|
func |
IO$_ACCESS. |
|
iosb |
Address of a quadword I/O status block that is to receive the completion status. |
|
astadr |
Entry point address of an AST routine that executes when the I/O operation completes. If specified, the AST routine executes at the access mode from which the $QIO service was requested. |
|
astprm |
AST parameter to be passed to the AST completion routine. |
|
p1 |
Not used (omit the argument). |
|
p2 |
Address of a quadword descriptor of the NCB (see Section 8.6.1.4, ''Using the Network Connect Block''). Both the descriptor and the NCB must be in read/write storage. |
Return Status
|
SS$_NORMAL |
The service completed successfully. |
|
SS$_CONNECFAIL |
The connection to a network object timed out or failed. |
|
SS$_DEVOFFLINE |
The physical link is shutting down. |
|
SS$_FILALRACC |
A logical link is already accessed on the channel (that is, a previous connection is active on the channel). |
|
SS$_INSFMEM |
There is not enough system dynamic memory to complete the request. |
|
SS$_INVLOGIN |
The access control information was found to be invalid at the remote node. |
|
SS$_IVDEVNAM |
The NCB has an invalid format or content. |
|
SS$_LINKEXIT |
The network partner task was started, but exited before confirming the logical link (that is, $ASSIGN to SYS$NET). |
|
SS$_NOLINKS |
No logical links are available. The maximum number of logical links as set for the executor MAXIMUM LINKS parameter was exceeded. |
|
SS$_NOPRIV |
The issuing task does not have the required privileges to create a logical link to the designated target. |
|
SS$_NOSUCHNODE |
The specified node is unknown. |
|
SS$_NOSUCHOBJ |
The network object number is unknown at the remote node; or for a TASK= connect, the named DCL command procedure file cannot be found at the remote node. |
|
SS$_NOSUCHUSER |
The remote node could not recognize the login information supplied with the connection request. |
|
SS$_PROTOCOL |
A network protocol error occurred. This error is most likely due to a network software error. |
|
SS$_REJECT |
The network object rejected the connection. |
|
SS$_REMRSRC |
The link could not be established because system resources at the remote node were insufficient. |
|
SS$_SHUT |
The local or remote node is no longer accepting connections. |
|
SS$_THIRDPARTY |
The logical link was terminated by a third party (for example, the system manager). |
|
SS$_TOOMUCHDATA |
The task specified too much optional or interrupt data. |
|
SS$_UNREACHABLE |
The remote node is currently unreachable. |
8.6.2.3. $QIO (Accepting Logical Link Connection Request)
The $QIO system service with the function code IO$_ACCESS accepts a logical link connection request from a source task. You can send 1 to 16 bytes of optional data to the source task at the same time that you issue the $QIO system service.
Format
$QIO [efn] ,chan ,func ,[iosb] ,[astadr] ,[astprm] ,[p1] ,p2
Arguments
|
efn |
Number of the event flag to be set at request completion. |
|
chan |
Channel number associated with the logical link. Use the same channel number returned in the $ASSIGN call. |
|
func |
IO$_ACCESS. |
|
iosb |
Address of a quadword I/O status block that is to receive the completion status. |
|
astadr |
Entry point address of an AST routine that executes when the I/O operation completes. If specified, the AST routine executes at the access mode from which the $QIO service was requested. |
|
astprm |
AST parameter to be passed to the AST completion routine. |
|
p1 |
Not used (omit the argument). |
|
p2 |
Address of a quadword descriptor of the NCB (see Section 8.6.1.4, ''Using the Network Connect Block''). Both the descriptor and the NCB must be in read/write storage. |
Return Status
|
SS$_NORMAL |
The service completed successfully. |
|
SS$_DEVALLOC |
The process cannot access the logical link specified in the NCB because that link is intended for another process. |
|
SS$_EXQUOTA |
The process does not have sufficient quota to complete the request. |
|
SS$_INSFMEM |
There is not enough system dynamic memory to complete the request. |
|
SS$_IVDEVNAM |
The NCB has an invalid format or content. |
|
SS$_LINKABORT |
The network partner task aborted the logical link. |
|
SS$_LINKDISCON |
The network partner task disconnected the logical link. |
|
SS$_LINKEXIT |
The network partner task exited. |
|
SS$_NOSUCHNODE |
The specified node is unknown. |
|
SS$_PATHLOST |
The path to the network partner task node was lost. |
|
SS$_PROTOCOL |
A network protocol error occurred. This error is most likely due to a network software error. |
|
SS$_THIRDPARTY |
The logical link connection was terminated by a third party (for example, the system manager). |
|
SS$_TIMEOUT |
The connection request did not complete within the required time. |
|
SS$_UNREACHABLE |
The remote node is currently unreachable. |
8.6.2.4. $QIO (Rejecting a Logical Link Connection Request)
The $QIO system service with the function code IO$_ACCESS!IO$M_ABORT rejects a logical link connection request. You can send 1 to 16 bytes of optional data to the target task at the same time that you issue the $QIO system service.
Format
$QIO [efn] ,chan ,func ,[iosb] ,[astadr] ,[astprm] ,[p1] ,p2
Arguments
|
efn |
Number of the event flag to be set at request completion. |
|
chan |
Channel number associated with the logical link. Use the same channel number returned in the $ASSIGN call. |
|
func |
IO$_ACCESS!IO$M_ABORT. |
|
iosb |
Address of a quadword I/O status block that is to receive the completion status. |
|
astadr |
Entry point address of an AST routine that executes when the I/O operation completes. If specified, the AST routine executes at the access mode from which the $QIO service was requested. |
|
astprm |
AST parameter to be passed to the AST completion routine. |
|
p1 |
Not used (omit the argument). |
|
p2 |
Address of a quadword descriptor of the NCB (see Section 8.6.1.4, ''Using the Network Connect Block''). Both the descriptor and the NCB must be in read/write storage. |
Return Status
|
SS$_NORMAL |
The service completed successfully. |
|
SS$_DEVALLOC |
The process cannot access the logical link specified in the NCB because that link is intended for another process. |
|
SS$_EXQUOTA |
The process does not have sufficient quota to complete the request. |
|
SS$_IVDEVNAM |
The NCB has an invalid format or content. |
|
SS$_LINKABORT |
The network partner task aborted the logical link. |
|
SS$_LINKDISCON |
The network partner task disconnected the logical link. |
|
SS$_LINKEXIT |
The network partner task exited. |
|
SS$_NOSUCHNODE |
The specified node is unknown. |
|
SS$_TIMEOUT |
The connection request did not complete within the required time. |
|
SS$_PATHLOST |
The path to the network partner task node was lost. |
|
SS$_PROTOCOL |
A network protocol error occurred. This error is most likely due to a network software error. |
|
SS$_THIRDPARTY |
The logical link connection was terminated by a third party (for example, the system manager). |
|
SS$_UNREACHABLE |
The remote node is currently unreachable. |
8.6.2.5. $QIO (Sending a Message to a Target Task)
The $QIO system service with the function code IO$_WRITEVBLK or IO$_WRITEVBLK!IO$M_INTERRUPT or IO$_WRITEVBLK!IO$M_MULTIPLE sends a message to a target task. Refer to Section 8.5.5.2, ''$QIO (Sending a Message to a Target Task)'' for the format of this call, its arguments, and possible return status codes.
8.6.2.6. $QIO (Receiving a Message from a Target Task)
The $QIO system service with the function code IO$_READVBLK or IO$_READVBLK!IO$M_MULTIPLE receives a message from a target task. Refer to Section 8.5.5.3, ''$QIO (Receiving a Message from a Target Task)'' for the format of this call, its arguments, and possible return status codes.
8.6.2.7. $QIO (Sending an Interrupt Message to a Target Task)
The $QIO system service with the function code IO$_WRITEVBLK!IO$M_INTERRUPT sends a 1- to 16-byte interrupt message to a target task. If the remote node is a VMS operating system, the message is placed in the mailbox associated with the target task.
Format
$QIO [efn] ,chan ,func ,[iosb] ,[astadr] ,[astprm] ,p1 ,p2
Arguments
|
efn |
Number of the event flag to be set at event completion. |
|
chan |
Channel number associated with the logical link. Use the same channel number returned in the $ASSIGN call. |
|
func |
IO$_WRITEVBLK!IO$M_INTERRUPT. |
|
iosb |
Address of a quadword I/O status block that is to receive the completion status. |
|
astadr |
Entry point address of the AST routine that executes when the I/O operation completes. If specified, the AST routine executes at the access mode from which the $QIO service was requested. |
|
astprm |
AST parameter to be passed to the AST completion routine. |
|
p1 |
Buffer address. |
|
p2 |
Buffer length (1 to 16 bytes). |
Return Status
|
SS$_NORMAL |
The service completed successfully. |
|
SS$_ABORT |
The I/O request has been aborted by a $DASSGN or $CANCEL call. |
|
SS$_FILNOTACC |
No logical link is associated with the channel. |
|
SS$_INSFMEM |
Enough memory to buffer the message could not be allocated. |
|
SS$_LINKABORT |
The network partner task aborted the logical link. |
|
SS$_LINKDISCON |
The network partner task disconnected the logical link. |
|
SS$_LINKEXIT |
The network partner task exited. |
|
SS$_NOSOLICIT |
DECnet could not accept an interrupt message at this time. |
|
SS$_TOOMUCHDATA |
The task specified too much interrupt data. |
|
SS$_PATHLOST |
The path to the network partner task node was lost. |
|
SS$_PROTOCOL |
A network protocol error occurred. This error is most likely due to a network software error. |
|
SS$_THIRDPARTY |
The logical link connection was terminated by a third party (for example, the system manager). |
8.6.2.8. $QIO (Synchronously Disconnecting a Logical Link)
The $QIO system service with the function code IO$_DEACCESS!IO$M_SYNCH synchronously disconnects the logical link. All pending messages are transmitted to the remote node before the link is disconnected.
You can send 1 to 16 bytes of optional data to the task from which you are disconnecting at the same time you issue this $QIO system service.
Format
$QIO [efn] ,chan ,func ,[iosb] ,[astadr] ,[astprm] ,[p1] ,[p2]
Arguments
|
efn |
Number of the event flag to be set at event completion. |
|
chan |
Channel number associated with the logical link. Use the same channel number returned in the $ASSIGN call. |
|
func |
IO$_DEACCESS!IO$M_SYNCH. |
|
iosb |
Address of a quadword I/O status block that is to receive the completion status. |
|
astadr |
Entry point address of the AST routine that executes when the I/O operation completes. If specified, the AST routine executes at the access mode from which the $QIO service was requested. |
|
astprm |
AST parameter to be passed to the AST completion routine. |
|
p1 |
Not used (omit the argument). |
|
p2 |
Address of a descriptor of a counted ASCII string of optional user data. Both the string and its descriptor must be in read/write storage. |
Return Status
|
SS$_NORMAL |
The service completed successfully. |
|
SS$_FILNOTACC |
No logical link is associated with the channel. |
8.6.2.9. $QIO (Aborting a Logical Link)
The $QIO system service with the function code IO$_DEACCESS!IO$_ABORT terminates the logical link. Note, however, that the DEACCESS function completes only after all pending I/O operations complete, even if you specify IO$_ABORT. First, issue the $CANCEL system service call to cancel I/O operations on the logical link and then issue this call to terminate the logical link.
You can send 1 to 16 bytes of optional data to the task from which you are disconnecting at the same time that you issue this $QIO system service call.
Format
$QIO [efn] ,chan ,func ,[iosb] ,[astadr] ,[astprm] ,[p1] ,[p2]
Arguments
|
efn |
Number of the event flag to be set at event completion. |
|
chan |
Channel number associated with the logical link. Use the same channel number returned in the $ASSIGN call. |
|
func |
IO$_DEACCESS!IO$M_ABORT. |
|
iosb |
Address of a quadword I/O status block that is to receive the completion status. |
|
astadr |
Entry point address of the AST routine that executes when the I/O operation completes. If specified, the AST routine executes at the access mode from which the $QIO service was requested. |
|
astprm |
AST parameter to be passed to the AST completion routine. |
|
p1 |
Not used (omit the argument). |
|
p2 |
Address of a quadword descriptor of a counted string of optional user data. Both the string and its descriptor must be in read/write storage. |
Return Status
|
SS$_NORMAL |
The service completed successfully. |
|
SS$_FILNOTACC |
No logical link is associated with the channel. |
8.6.2.10. $QIO (Declaring a Network Name or Object Number)
The $QIO system service with the function code IO$_ACPCONTROL assigns a network name or object number to the task, thereby making it eligible to process multiple inbound connection requests. You must associate a mailbox with the I/O channel. All inbound connection requests are placed in the mailbox associated with the channel over which this I/O function is issued. You need the SYSNAM privilege to declare a name or object number.
The $QIO system service with the function code IO$_ACPCONTROL assigns a network name or object number to the task, thereby making it eligible to process multiple inbound connection requests. You must associate a mailbox with the I/O channel. All inbound connection requests are placed in the mailbox associated with the channel over which this I/O function is issued. You need the SYSNAM privilege to declare a name or object number.
Note
If the maximum message size of the associated mailbox is too small, the task may not be notified of all inbound connection requests.
Whenever a logical link is established, obtain its device unit number (for example, 18 from _NET18:) by using the $GETDVI system service, because unit numbers (not channel numbers) appear in mailbox messages. Use this system service call where a single mailbox is being used for many logical links. The unit number could be used as a key into a database that keeps track of multiple links.
Format
$QIO [efn] ,chan ,func ,[iosb] ,[astadr] ,[astprm] ,p1 ,p2
Arguments
|
efn |
Number of the event flag to be set at event completion. |
|
chan |
Word containing the channel number associated with the logical link. Use the same channel number assigned in the $ASSIGN call. |
|
func |
IO$_ACPCONTROL. |
|
iosb |
Address of a quadword I/O status block that is to receive the completion status. |
|
astadr |
Entry point address of the AST routine that executes when the I/O operation completes. If specified, the AST routine executes at the access mode from which the $QIO service was requested. |
|
astprm |
AST parameter to be passed to the AST completion routine. |
|
p1 |
Address of a quadword descriptor of a 5-byte
block consisting of a function type (one byte) and
a longword parameter. The function type is a
symbol defined by the $NFBDEF macro in
SYS$LIBRARY:LIB.MLB. The format of the 5-byte
block for declaring a name is as follows:
.BYTE NFB$C_DECLNAME .LONG 0 The format of the 5-byte block for declaring
an object number is as follows:
.BYTE NFB$C_DECLOBJ .LONG object-number The object number is a number reserved for customer use in the range of 128 to 255. This 5-byte buffer and its descriptor should be in read/write storage. |
|
p2 |
Address of a quadword descriptor of the network name (maximum of 12 characters). You should not supply this argument for the DECLOBJ function. Both the name and its descriptor must be in read/write storage. |
Return Status
|
SS$_NORMAL |
The service completed successfully. |
|
SS$_BADPARAM |
One of the QIO parameters has an invalid value. |
|
SS$_ILLCNTRFUNC |
The control function is invalid. |
|
SS$_NOMBX |
A name or object number is being declared using a channel without an associated mailbox. |
|
SS$_NOPRIV |
The issuing process does not have the SYSNAM privilege. |
| SS$_TOOMUCHDATA | The object could not be declared because the number of declared objects would exceed the value of the Executor MAXIMUM DECLARED OBJECTS parameter. |
8.6.2.11. $DASSGN (Terminating a Logical Link)
The $DASSGN system service terminates all pending operations to send and receive data, aborts the logical link immediately, and frees the channel associated with that link. Refer to Section 8.5.5.4, ''$DASSGN (Disconnecting a Logical Link)'' for the format of this call, its arguments, and possible return status codes.
8.7. Designing Tasks
The following sections describe a command procedure and user program examples designed to perform task-to-task communications over the network.
The command procedure and the FORTRAN user program example illustrate transparent operations. The C language user program example illustrates nontransparent operation.
8.7.1. DCL Command Procedure for Task-to-Task Communication
$ TYPE TRNTO"BROWN JUNE"::"TASK=SHOWBQ"
SHOWBQ.COM $ ! $ ! This command procedure returns status information about $ ! jobs entered in batch queues on the system where it $ ! executes. It may be run interactively as a command $ ! procedure, submitted as a local or remote batch job, or $ ! invoked as a "remote task" to display information about $ ! another system. For example: $ ! $ ! $ @SHOWBQ $ ! $ SUBMIT SHOWBQ $ ! $ SUBMIT/REMOTE node::SHOWBQ $ ! $ TYPE node::"TASK=SHOWBQ" $ ! $ IF F$MODE() .EQS. "NETWORK" THEN GOTO NET $ SHOW QUEUE/BATCH/BRIEF/ALL $ EXIT $NET: $ DEFINE SYS$OUTPUT SYS$NET $ SHOW QUEUE/BATCH/BRIEF/ALL $ EXIT
8.7.2. FORTRAN Program for Task-to-Task Communication
PROGRAM TEST3.FOR C C This program prompts the user for the part number of an item C in inventory and responds with the number of units in stock. C The information is obtained by communicating with a program C (TEST4) on another node that has access to the inventory data. C C Before running this program, the logical name TASK must be C defined to refer to the target program. For example: C C $ DEFINE TASK "TRNTO::""TASK=TEST4""" C $ RUN TEST3 C CHARACTER PARTNO*5 INTEGER PARTCOUNT C 100 FORMAT (/,’$Enter part number: ’) 200 FORMAT (A) 300 FORMAT (I4) 400 FORMAT (’0Inventory for part number ’,A,’ is: ’,I4) C C Establish a logical link with the target task. COPEN (UNIT=1,NAME='TASK',ACCESS='SEQUENTIAL', 1 FORM='FORMATTED',CARRIAGECONTROL='NONE',TYPE='NEW') C C Prompt the user for a part number, send it to the target task, C read reply of quantity on hand, and finally display the answer C for the user. Repeat the cycle until the user enters 'EXIT' for C a part number. C 10 TYPE 100 ACCEPT 200, PARTNO IF (PARTNO .EQ. 'EXIT') GOTO 20
WRITE (1,200) PARTNO READ (1,300) PARTCOUNT TYPE 400, PARTNO, PARTCOUNT GOTO 10 C C Disconnect the logical link. C 20
CLOSE (UNIT=1) END $ ! $ ! *********************************************************** $ ! TEST4.COM $ ! $ ! This command procedure executes the program TEST4 after $ ! being started by a task-to-task connection request issued $ ! by TEST3. $ !
$ RUN SYS$LOGIN:TEST4.EXE $ EXIT PROGRAM TEST4.FOR C C Test4 is the target program that communicates with TEST3. C For each part number received from the source task, the C number of units in stock is determined, and this value is C returned. C C To complete the logical link with its initiator, this program C uses the logical name SYS$NET as the file specification in an C open statement. C CHARACTER PARTNO*5 INTEGER PARTCOUNT C 100 FORMAT (A) 200 FORMAT (I4) C C Complete the logical link connection. C
OPEN (UNIT=1,NAME='SYS$NET',ACCESS='SEQUENTIAL', 1 FORM='FORMATTED',CARRIAGECONTROL='NONE',TYPE='OLD') C C Process requests until end-of-file is reached. (This is the C error condition returned when the source task breaks the C logical link connection.) C 10
Notes on Example 8.1, ''FORTRAN Task-to-Task Communication''
| The source task, TEST3, requests a logical link connection to the target task, TEST4. |
| TEST3 and TEST4 send and receive data messages. |
| TEST3 disconnects the logical link and thereby terminates the communication process. |
| When the remote node receives a connection request, the command procedure TEST4.COM is executed. This command procedure must reside in the default directory associated with the account being accessed. TEST4.COM contains a RUN statement that causes the program TEST4.EXE to be executed. |
| TEST4 completes the logical link connection through SYS$NET. Note that the unit numbers in the source and target programs need not be the same. Because system-dependent language calls are translated into a common set of DECnet messages, a task written in one language can communicate with another task written in a different language. |
8.7.3. Programs for Nontransparent Task-to-Task Communication
Online program examples of nontransparent task-to-task communications are available on the system distribution medium. The example programs are named as follows:
SYS$EXAMPLES:DB_REQUESTER.C
SYS$EXAMPLES:DB_SERVER.C
Chapter 9. File Operations in a Heterogeneous Network Environment
- OpenVMS to IAS
- OpenVMS to RSTS/E
- OpenVMS to RSX using RMS-based FAL
- OpenVMS to RSX using FCS-based FAL
- OpenVMS to RT–11
- OpenVMS to TOPS–10
- OpenVMS to TOPS–20
- OpenVMS to MS–DOS
- OpenVMS to ULTRIX
- OpenVMS to IBM
- OpenVMS to OpenVMS
The chapter is organized by operating-system type: one section for each multivendor system with which your system running DECnet for OpenVMS may communicate. Each section describes differences in file system operation between the two systems and constraints on the use of OpenVMS file processing commands. The restrictions on the remote file operations you can perform from an OpenVMS node to a particular multivendor node result from file system design differences and DECnet implementation restrictions between the systems.
The appropriate section for each remote system itemizes the OpenVMS Record Management Services (RMS) features that are supported between DECnet for OpenVMS systems, but are not supported when accessing files on the multivendor system. The chapter also discusses limitations on the DCL commands that you can use when communicating with the remote node. Throughout this chapter, comments are provided to help you handle the differences in file system design.
9.1. DECnet for OpenVMS Restrictions
- The following OpenVMS RMS service calls are not supported for network use:
$ENTER
$NXTVOL
$REMOVE
The Terminal XAB is not supported for network operations; it is ignored.
Protection XAB fields that support access control lists are ignored for network operations.
Only one data stream per open file is allowed. That is, the multistream (MSE) bit option of the file sharing (SHR) field of the FAB is not supported for network use.
Access to files on magnetic tapes mounted on a remote OpenVMS operating system is not supported. You can, however, copy files from a local magnetic tape to disk on a remote node.
When multiple Allocation XABs are linked to the FAB, they must be in ascending order by area number (AID field). Similarly, when multiple Key Definition XABs are used, they must be in ascending order by key of reference (REF field).
File protection information may not be completely preserved if the two nodes do not fully support each other’s protection attributes. An example of this incompatibility occurs between the RSX–11M or RSX–11M–PLUS and OpenVMS operating systems. Although both RSX and OpenVMS nodes represent their protection masks as RWED, RSX nodes interpret that as Read, Write, Extend, and Delete, while OpenVMS nodes interpret RWED as Read, Write, Execute, and Delete. This results in the ‘‘E’’ protection field being unmappable between these two systems.
The Journaling XABs are not supported.
File monitoring is not supported.
9.2. OpenVMS to IAS Network Operation
This section pertains to a OpenVMS node communicating with an IAS node running DECnet–IAS Version 3.0. The discussion focuses on file operations initiated from the OpenVMS node to access remote files by means of the FAL at the IAS node.
The restrictions described in the following subsections are related to incompatible features in file system design between the two operating systems.
9.2.1. File Formats and Access Modes
- File organizations and record formats
Sequential
Stream (STM)
Stream_CR (STMCR)
Stream_LF (STMLF)
Variable with fixed control (VFC) where fixed header size is not 2 bytes
Relative
All formats
Indexed
All formats
- Record attributes
- Print file carriage control (PRN)
- File access modes
- Random access by relative record number
- Random access by key value
- Random access by record file address
- Block I/O
$ CONVERT/FDL=VAR.FDL input-file output-file
FILE ORGANIZATION sequential
RECORD FORMAT variable
CARRIAGE_CONTROL carriage_returnThe CONVERT command and associated FDL control file transforms the input file to variable-length format with implied carriage control and copies it to the remote node according to the output file specification.
9.2.2. OpenVMS RMS Interface
- OpenVMS RMS service calls
$DELETE $DISPLAY $EXTEND $FIND $FREE $READ $RELEASE $RENAME $REWIN
$SPACE $TRUNCATE $UPDATE $WRITE - RMS extended attribute blocks
- Allocation XAB
- Key Definition XAB
- Summary XAB
- Significant fields and bit options of the FAB
- CBT (contiguous-best-try) bit of FOP field
- DEQ (default extend quantity) field
9.2.3. File Specifications
node::device:[directory]name.type;version
IAS does not support dollar sign ($), underscore (_) and hyphen (-) characters in file name components.
IAS does not recognize the percent sign (%) as a valid wildcard character.
The directory component of an IAS file specification cannot be a named directory list, such as [A.B.C]; it must be in UIC (user identification code) format, such as [100,3].
The file name component has a maximum length of nine characters and the file type cannot exceed three characters. IAS systems return an error if you specify a longer file name or file type.
IAS uses octal version numbers in file specifications whereas OpenVMS uses decimal version numbers.
9.2.4. DCL Considerations
ANALYZE/RMS_FILE
BACKUP
OPEN/WRITE
RENAME
9.2.4.1. APPEND
Using the APPEND command, you are limited to appending one local input file to the output file residing on the IAS node.
9.2.4.2. COPY
The /EXTENSION and /PROTECTION qualifiers for the COPY command are notsupported and are ignored if specified.
File creation date and time information is not preserved on a file copy operation to an IAS node where wildcards are used in the output file specification. Instead, the current date and time are used as the file creation date and time.
$ COPY A.DAT;9 IAS::*.* %COPY-E-OPENOUT, error opening _IAS::A.DAT;9 as output -RMS-F-FNM, error in file name
$ COPY A.DAT;9 IAS::A.DAT;11 $ COPY B.DAT;28 IAS::*.*; $ COPY B.DAT;28 IAS::*.*;0 $ COPY *.DAT IAS::*.*;0
9.3. OpenVMS to RSTS/E Network Operation
This section pertains to an OpenVMS node communicating with a RSTS/E node running DECnet/E Version 3.0. The discussion focuses on file operations initiated from the OpenVMS node, to access remote files by means of FAL at the RSTS/E node.
The following restrictions are related to incompatible features in file system design between the two systems.
9.3.1. File Formats and Access Modes
- File organizations and record formats
Sequential
Stream_CR (STMCR)
Stream_LF (STMLF)
Indexed
All prologue 3 formats
With 64-bit binary (BN8) key types
With 64-bit integer (IN8) key types
With collating (COL) key types
With descending key types (DSTG, DIN2, DBN2, DIN4, DBN4, DIN8, DBN8, DPAC, DCOL)
- Record attributes
- Attributes are compatible.
- File access modes
- Random access by key value
- Random access by record file address
DECnet/E does not support record mode access to indexed files; it supports only block I/O access to indexed files.
Note that an attempt to access an indexed file located on a RSTS/E node in record mode results in an RMS–F–BUG_DAP error instead of an RMS–F–SUPPORT error.
9.3.2. OpenVMS RMS Interface
- OpenVMS RMS service calls
$DISPLAY
$EXTEND
$FREE
$RELEASE
$RENAME
$SPACE
$TRUNCATE
- RMS extended attribute blocks
- Allocation XAB
- Key Definition XAB
- Summary XAB
- Significant fields and bit options of the FAB
- CBT (contiguous-best-try) bit of FOP field
- DEQ (default extend quantity) field
9.3.3. File Specifications
node::device:[directory]name.type
RSTS/E does not support dollar sign ($), underscore (_) and hyphen (-) characters in file name components, except for the special use of the dollar sign at the start of a file name.
RSTS/E does not recognize the percent sign (%) as a valid wildcard character.
The directory component of a RSTS/E file specification cannot be a named directory list, such as [A.B.C]; it must be in UIC (user identification code)format, such as [1,2]. RSTS/E operating systems, however, express UICs in decimal radix, whereas OpenVMS operating systems use octal numbers. On the RSTS/E operating system, the UIC is referred to as a PPN (project programmer number).
To access a RSTS/E file whose directory component in PPN format contains decimal digits, use the quoted string form of the file specification. For example:$ TYPE RSTS::"SY:[9,18]TEST.DAT"
The file name component has a maximum length of six characters and the file type cannot exceed three characters. If you specify a longer file name, RSTS/E truncates the name to six characters.
RSTS/E does not support version numbers. It accepts a file specification containing a version number without returning an error, but ignores the version number.
9.3.4. DCL Considerations
PURGE
RENAME
9.3.4.1. APPEND
In using the APPEND command, you are limited to appending one local input file to an output file on the RSTS/E node.
9.3.4.2. COPY
The /EXTENSION and /PROTECTION qualifiers for the COPY command are not supported and are ignored if specified.
File creation date and time information is not preserved on a file copy operation to a RSTS/E node where wildcards are used in the output file specification. Instead, the current date and time are used as the file creation date and time.
$ COPY TEST.DAT;2 RSTS::*.* %COPY-E-OPENOUT, error opening _RSTS::TEST.DAT;2 as output -RMS-E-FEX, file already exists, not superseded
9.3.4.3. DELETE
If you use the DELETE command with a wildcard file specification to delete several files from a directory on a remote RSTS/E node, the operation may appear to complete successfully even though some of the files may remain in the directory. This behavior is caused by a file system incompatibility in the way OpenVMS and RSTS/E perform wildcard file deletion operations. This problem occurs only if the remote directory has at least 30 files cataloged.
To determine if all the files you specify have been deleted successfully, enter a DIRECTORY command to examine the remote directory. Then repeat the wildcard DELETE command if necessary to remove unwanted files. If the number of files you are attempting to delete is small, using the /LOG qualifier with the DELETE command may help you to determine if all the files have been deleted.
9.3.4.4. DIRECTORY
The file owner is displayed as [0,0] if the owner of the file is identified by a UIC that contains decimal digits.
The file REVISION number shown is either 0 or 1. A REVISION number of 0 indicates the file has not been revised; a REVISION number of 1 indicates the file has been revised.
Under the attributes of an indexed file, information about the number of keys, the number of areas, and the prologue version number of the file is not displayed. This information is omitted because the RSTS/E FAL does not return file attribute information stored in the prologue portion of an indexed file.
Under the attributes of a relative file, the maximum record number is displayed as 0.
9.3.4.5. DUMP/RECORDS and TYPE Commands
Because RSTS/E does not support record mode access (nonblock I/O access) to indexed files, you cannot use the DCL commands DUMP/RECORDS and TYPE to examine indexed files located on the remote RSTS/E node.
9.4. OpenVMS to RSX Network Operation Using RMS-Based FAL
This section pertains to a OpenVMS node communicating with an RSX node running either DECnet–11M Version 4.0 or DECnet–11M–PLUS Version 2.0 where the RSX File Access Listener (FAL) calls RMS–11 to perform local file operations. The discussion focuses on file operations initiated from the OpenVMS node, to access remote files by means of the FAL at the RSX node.
The following restrictions are related to incompatible features in file system design between the two systems.
9.4.1. File Formats and Access Modes
- File organizations and record formats
Sequential
Stream_CR (STMCR)
Stream_LF (STMLF)
Indexed
All prologue 3 formats
With 64-bit binary (BN8) key types
With 64-bit integer (IN8) key types
With collating (COL) key types
With descending key types (DSTG, DIN2, DBN2, DIN4, DBN4, DIN8, DBN8, DPAC, DCOL)
- Record attributes
- Record attributes are compatible.
- File access modes
- Modes are compatible.
9.4.2. OpenVMS RMS Interface
- OpenVMS RMS service call
$RELEASE
- Significant fields and bit options of the FAB
- CBT (contiguous-best-try) bit of FOP
9.4.3. File Specifications
node::device:[directory]name.type;version
RSX operating systems do not support dollar sign ($), underscore (_) and hyphen (-) characters in file name components.
The directory component in an RSX file specification cannot be a named directory list, such as [A.B.C]; it must be in UIC (user identification code) format, such as [15,1].
The file name component has a maximum length of nine characters and the file type cannot exceed three characters. RSX operating systems return an error if you specify a longer file name or file type.
RSX operating systems use octal version numbers in file specifications whereas the OpenVMS operating system uses decimal version numbers.
9.4.4. DCL Considerations
Of the OpenVMS DCL commands that you can use over the network, OPEN /WRITE is not supported between OpenVMS and an RMS-based RSX node.
9.4.4.1. COPY
$ COPY A.DAT;9 RSX::*.* %COPY-E-OPENOUT, error opening RSX::A.DAT;9 as output -RMS-F-FNM, error in file name
$ COPY A.DAT;9 RSX::A.DAT;11 $ COPY B.DAT;28 RSX::*.*; $ COPY B.DAT;28 RSX::*.*;0 $ COPY *.DAT RSX::*.*;0
9.5. OpenVMS to RSX Network Operation Using FCS-Based FAL
This section pertains to a OpenVMS node communicating with an RSX node running DECnet–11M Version 4.0 or DECnet–11M–PLUS Version 2.0 where the RSX FAL calls the File Control Services (FCS–11) to perform file operations. The discussion focuses on file operations initiated from the OpenVMS node to access remote files by means of the FAL at the RSX node.
The following restrictions are related to incompatible features in file system design between the two systems.
9.5.1. File Formats and Access Modes
- File organizations and record formats
Sequential
Stream (STM)
Stream_CR (STMCR)
Stream_LF (STMLF)
Variable with fixed control (VFC) where fixed header size is not 2 bytes
Relative
All formats
Indexed
All formats
- Record attributes
- Print file carriage control (PRN)
- File access modes
- Random access by relative record number
- Random access by key value
- Random access by record file address
- Block I/O
$ CONVERT/FDL=VAR.FDL input-file output-file
FILE ORGANIZATION sequential
RECORD FORMAT variable
CARRIAGE_CONTROL carriage_returnThe CONVERT command and associated FDL control file transform the input file to variable-length format with implied carriage control and then copy it to the remote node according to the output file specification.
9.5.2. OpenVMS RMS Interface
- OpenVMS RMS service calls
$DELETE $DISPLAY $EXTEND $FIND $FREE $READ $RELEASE $RENAME $REWIND $SPACE $TRUNCATE $UPDATE $WRITE - RMS extended attribute blocks
- Allocation XAB
- Key Definition XAB
- Summary XAB
- Significant fields and bit options of the FAB
- CBT (contiguous-best-try) bit of FOP field
- DEQ (default extension quantity) field
9.5.3. File Specifications
node::device:[directory]name.type;version
RSX operating systems do not support dollar sign ($), underscore (_) and hyphen (-) characters in file name components.
The directory component in an RSX file specification cannot be a named directory list, such as [A.B.C]; it must be in UIC (user identification code) format, such as [15,1].
The file name component has a maximum length of nine characters and the file type cannot exceed three characters. RSX operating systems return an error if you specify a longer file name or file type.
RSX operating systems use octal version numbers in file specifications whereas OpenVMS uses decimal version numbers.
9.5.4. DCL Considerations
ANALYZE/RMS_FILE
BACKUP
OPEN/WRITE
RENAME
9.5.4.1. APPEND
In using the APPEND command, you are limited to appending one local input file to an output file residing on the FCS-based RSX node.
9.5.4.2. COPY
The /EXTENSION and /PROTECTION qualifiers for the COPY command are not supported and are ignored if specified.
File creation date and time information is not preserved on a file copy operation to an RSX node where wildcards are used in the output file specification. Instead, the current date and time are used as the file creation date and time.
$ COPY A.DAT;9 RSX::*.* %COPY-E-OPENOUT, error opening RSX::A.DAT;9 as output -RMS-F-FNM, error in file name
$ COPY A.DAT;9 RSX::A.DAT;11 $ COPY B.DAT;28 RSX::*.*; $ COPY B.DAT;28 RSX::*.*;0 $ COPY *.DAT RSX::*.*;0
9.6. OpenVMS to RT-11 Network Operations
This section pertains to a OpenVMS node communicating with an RT–11 node running DECnet–RT Version 2.1. The discussion focuses on file operations initiated from the OpenVMS node, to access remote files by means of the FAL at the RT-11 node.
9.6.1. File System Constraints
The file systems used by RT–11 and OpenVMS are dissimilar in many respects. A fundamental difference between them involves the handling of file attribute information. When you create a file on a OpenVMS operating system, attribute information about the file is stored in a header block on disk for use when the file is subsequently opened. The implication is that the structure of an established file cannot change. In contrast, RT–11 does not save attribute information such as file format with a file; it expects you to provide this information when you open the file. File attribute information, however, is not an input to OpenVMS RMS when you open a file.
To provide transparent access to files on a remote RT–11 operating system, OpenVMS RMS restricts the types of file that you can create and open on the remote node. When you access an RT–11 file in record mode, OpenVMS RMS treats the file a shaving stream format. Block I/O access is permitted; the remote file is viewed as having fixed length 512 byte records where virtual block number is translated to relative record number.
9.6.1.1. File Formats and Access Modes
- File organizations and record formats
Sequential
Fixed length (FIX) without implied carriage control
Stream_CR (STMCR)
Stream_LF (STMLF)
Variable length (VAR) without implied carriage control
Variable with fixed control (VFC)
Relative
All formats
Indexed
All formats
- Record attributes
- FORTRAN carriage control (FTN)
- Print file carriage control (PRN)
- None specified (embedded carriage control)
- Record access modes
- Random access by relative record number
- Random access by key value
- Random access by record file address
For record mode access, the only file type in common between the two systems is a sequential file in STM (stream) format. For convenience, however, when you are transferring a file to an RT–11 node, OpenVMS RMS automatically converts a OpenVMS sequential file with fixed or variable format and implied carriage control to a sequential file with stream format and embedded carriage control. This automatic conversion is performed during a file create operation, and OpenVMS RMS returns an alternate success code (RMS$_CVT_STM) to indicate that the file format has been modified.
Note also that, when a stream format file is retrieved from an RT–11 node, VAXRMS automatically changes the record attribute from embedded carriage control to implied carriage control.
$ CONVERT/FDL=STM.FDL input-file output-file
FILE ORGANIZATION sequential
RECORD FORMAT stream
CARRIAGE_CONTROL noneThe CONVERT command and associated FDL control file transform the input file to stream format with embedded carriage control and copies it to the remote node according to the output file specification.
9.6.1.2. OpenVMS RMS Interface
- OpenVMS RMS service calls
$DELETE
$DISPLAY
$EXTEND
$FIND
$FREE
$RELEASE
$RENAME
$REWIND
$SPACE
$TRUNCATE
$UPDATE
- RMS extended attribute blocks
- Key Definition XAB
- Summary XAB
- Significant fields and bit options of the FAB
- ALQ (allocation quantity) field
- DEQ (default extend quantity) field
- CBT (contiguous-best-try) bit of FOP field
- CTG (contiguous) bit of FOP field
- SCF (submit command file) bit of FOP field
- SPL (spool file) bit of FOP field
- Significant fields and bit options of the RAB
- EOF (position to end of file) bit of ROP field
9.6.2. File Specifications
node::device:name.type
RT-11 does not support dollar sign ($), underscore (_) and hyphen (-) characters in file name components.
RT-11 does not recognize the percent sign (%) as a valid wildcard character.
RT-11 does not have a directory component in its file specification.
The file name component has a maximum length of six characters and the file type cannot exceed three characters. If you specify a longer file name or file type, RT-11 returns an error.
RT-11 does not support version numbers. Specification of a version number, however, is permitted when you refer to an RT-11 file, because OpenVMS RMS discards any version number before sending the file specified to the RT-11 FAL.
9.6.3. DCL Considerations
ANALYZE/RMS_FILE
APPEND
BACKUP
OPEN/WRITE
PRINT/REMOTE
PURGE
RENAME
SUBMIT/REMOTE
9.6.3.1. COPY
The /ALLOCATION, /CONTIGUOUS, /EXTENSION, and /PROTECTION qualifiers for the COPY command are not supported and are ignored if specified.
Using COPY to merge several files into a single output file is not supported.
RT-11 does not support version numbers in file specifications and supersedes files by default. Therefore, if you attempt to copy a file with the same name and type as one that already exists on the remote RT-11 node, the new file supersedes the old one. No warning message is displayed.
9.6.3.2. DELETE
$ DELETE RT::TEST.DAT;
9.7. OpenVMS to TOPS–10 Network Operations
This section pertains to a OpenVMS node communicating with a TOPS–10 node running DECnet–10 Version 4.0. The discussion focuses on file operations initiated from the OpenVMS node, to access remote files by means of the FAL at the TOPS–10 node.
9.7.1. File System Constraints
The file systems used by TOPS–10 and OpenVMS are dissimilar in many respects. A fundamental difference between them involves the handling of file attribute information. When you create a file on a OpenVMS operating system,attribute information about the file is stored in a header block on disk for use when the file is subsequently opened. The implication is that the structure of an established file cannot change. In contrast, TOPS–10 does not save attribute information such as file format with a file; it expects you to provide this information when you open the file. File attribute information, however, is not an input to OpenVMS RMS when you open a file.
To provide transparent access to files on a remote TOPS–10 system, OpenVMS RMS restricts the types of file that you can create and open on the remote node. When you access a TOPS–10 file in record mode, OpenVMS RMS treats the file as having stream format.
9.7.1.1. File Formats and Access Modes
- File organizations and record formats
Sequential
Fixed length (FIX) without implied carriage control
Stream_CR (STMCR)
Stream_LF (STMLF)
Variable length (VAR) without implied carriage control
Variable with fixed control (VFC)
Relative
All formats
Indexed
All formats
- Record attributes
- FORTRAN carriage control (FTN)
- Print file carriage control (PRN)
- None specified (embedded carriage control)
- Record access modes
- Random access by relative record number
- Random access by key value
- Random access by record file address
- Block I/O
For record mode access, the only file type in common between the two systems is a sequential file in STM (stream) format. For convenience, however, when you are transferring a file to a TOPS–10 node, OpenVMS RMS automatically converts a OpenVMS sequential file with fixed or variable format and implied carriage control to a sequential file with stream format and embedded carriage control. This automatic conversion is performed during a file create operation, and OpenVMS RMS returns an alternate success code (RMS$_CVT_STM) to indicate that the file format has been modified.
Note also that when a stream format file is retrieved from a TOPS–10 node, OpenVMS RMS automatically changes the record attribute from embedded carriage control to implied carriage control.
$ CONVERT/FDL=STM.FDL input-file output-file
FILE ORGANIZATION sequential
RECORD FORMAT stream
CARRIAGE_CONTROL noneThe CONVERT command and associated FDL control file transform the input file to stream format with embedded carriage control and then copy them to the remote node according to the output file specification.
9.7.1.2. OpenVMS RMS Interface
- OpenVMS RMS service calls
$DELETE
$DISPLAY
$EXTEND
$FIND
$FREE
$READ
$RELEASE
$RENAME
$REWIND
$SPACE
$TRUNCATE
$UPDATE
$WRITE
- RMS extended attribute blocks
- Allocation XAB
- Key Definition XAB
- Summary XAB
- Significant fields and bit options of the FAB
- ALQ (allocation quantity) field
- DEQ (default extend quantity) field
- CBT (contiguous-best-try) bit of FOP field
9.7.1.3. File Specifications
node::device:[directory]name.type
The directory component of a TOPS–10 file specification is in PPN (project programmer number) format, such as [3655,7031], where the two numbers are in octal radix. The directory component can also be in extended PPN format containing up to five levels of subdirectories. An example of a directory component in extended PPN format is [10,20,A,B,C,D,E].
The OpenVMS operating system cannot parse directory components in PPN format (with numbers larger than 377 octal) or handle extended PPN formats containing subdirectories. The DECnet–10 implementation, however, does accept directory components using period (.) instead of comma (,) delimiters, and converts commas to periods when returning file specifications to OpenVMS operating systems. Consequently, when you enter a file specification for a remote TOPS–10 operating system, use the OpenVMS named directory list format for expressing TOPS–10 PPNs and extended PPNs. For example, use [3655.7031] or [10.20.A.B.C.D.E] to specify a directory component.
The file name component has a maximum length of six characters and the file type cannot exceed three characters. If you specify a longer file name, TOPS–10 truncates the name to six characters.
TOPS–10 does not support version numbers. It accepts a file specification containing a version number without returning an error, but ignores the version number.
9.7.2. DCL Considerations
ANALYZE/RMS_FILE
APPEND
BACKUP
OPEN/WRITE
RENAME
9.7.2.1. COPY
The /ALLOCATION and /EXTENSION qualifiers to the COPY command are not supported and are ignored if specified.
9.7.2.2. DIRECTORY
The file owner is displayed as [0,0] to indicate that this information is not available.
The file REVISION number is not shown and file REVISION date and time information is not available from the TOPS–10 operating system.
The blocks used and blocks allocated values displayed, which indicate the size of the file, refer to 128-word pages (providing 640 bytes of storage), not 512-byte blocks.
9.8. OpenVMS to TOPS–20 Network Operations
This section pertains to a OpenVMS node communicating with a TOPS–20 node running DECnet–20 Version 3.0. The discussion focuses on file operations initiated from the OpenVMS node, to access remote files by means of the FAL at the TOPS–20 node.
9.8.1. File System Constraints
The file systems used by TOPS–20 and OpenVMS are dissimilar in many respects. A fundamental difference between them involves the handling of file attribute information. When you create a file on a OpenVMS operating system, attribute information about the file is stored in a header block on disk for use when the file is subsequently opened. The implication is that the structure of an established file cannot change. In contrast, TOPS–20 does not save attribute information such as file format with a file; it expects you to provide this information when you open the file. File attribute information, however, is not an input to OpenVMS RMS when a file is opened.
To provide transparent access to files on a remote TOPS–20 operating system,OpenVMS RMS restricts the types of file that you can create and open on the remote node. When you access a TOPS–20 file in record mode, OpenVMS RMS treats the file as having stream format. Although block I/O is supported by DECnet–20, it is not supported between OpenVMS and TOPS–20 because the block sizes are different.
9.8.1.1. File Formats and Access Modes
- File organizations and record formats
Sequential
Fixed length (FIX) without implied carriage control
Stream_CR (STMCR)
Stream_LF (STMLF)
Variable length (VAR) without implied carriage control
Variable with fixed control (VFC)
Relative
All formats
Indexed
All formats
- Record attributes
- FORTRAN carriage control (FTN)
- Print file carriage control (PRN)
- None specified (embedded carriage control)
- Record access modes
- Random access by relative record number
- Random access by key value
- Random access by record file address
- Block I/O
For record mode access, the only file type in common between the two systems is a sequential file in STM (stream) format. For convenience, however, when you are transferring a file to a TOPS–20 node, OpenVMS RMS automatically converts a OpenVMS sequential file with fixed or variable format and implied carriage control to a sequential file with stream format and embedded carriage control. This automatic conversion is performed during a file create operation, and OpenVMS RMS returns an alternate success code (RMS$_CVT_STM) to indicate that the file format has been modified.
Note also that when a stream format file is retrieved from a TOPS–20 node, OpenVMS RMS automatically changes the record attribute from embedded carriage control to implied carriage control.
$ CONVERT/FDL=STM.FDL input-file output-file
FILE ORGANIZATION sequential
RECORD FORMAT stream
CARRIAGE_CONTROL noneThe CONVERT command and associated FDL control file transform the input file to stream format with embedded carriage control and then copy it to the remote node according to the output file specification.
9.8.1.2. OpenVMS RMS Interface
- OpenVMS RMS service calls
$DELETE
$DISPLAY
$EXTEND
$FIND
$FREE
$READ
$RELEASE
$RENAME
$REWIND
$SPACE
$TRUNCATE
$UPDATE
$WRITE
- RMS extended attribute blocks
- Allocation XAB
- Key Definition XAB
- Summary XAB
- Significant fields and bit options of the FAB
- ALQ (allocation quantity) field
- DEQ (default extend quantity) field
- CBT (contiguous-best-try) bit of FOP field
- CTG (contiguous) bit of FOP field
- Significant fields and bit options of the RAB
- EOF (position to end of file) bit of ROP field
9.8.1.3. File Specifications
node::device<directory>name.type.version
TOPS–20 uses angle brackets (<>) to delimit the directory string instead of square brackets ([]). To facilitate communication with TOPS–20, OpenVMS RMS recognizes angle brackets as valid directory component delimiters.
TOPS–20 uses the period (.) to delimit the version number instead of the semicolon (;). However, you can specify either a period or a semicolon because OpenVMS RMS converts a semicolon version number delimiter to a period before sending the file specification to the TOPS–20FAL.
9.8.2. DCL Considerations
ANALYZE/RMS_FILE
APPEND
BACKUP
OPEN/WRITE
RENAME
9.8.2.1. COPY
The /ALLOCATION, /CONTIGUOUS, /EXTENSION, and /PROTECTION qualifiers to the COPY command are not supported and are ignored if specified.
File creation date and time are not preserved during a file copy operation.
Using COPY to merge several files into a single output file is not supported.
9.8.2.2. DIRECTORY
The file owner is displayed as [0,0] to indicate that this information is not available.
The file REVISION number is not shown.
The blocks used and blocks allocated values displayed, which indicate the size of the file, refer to 128-word pages (providing 640 bytes of storage), not 512-byte blocks.
TOPS–20 does not have the equivalent of world protection, so this attribute is displayed as a null string.
9.9. OpenVMS to MS–DOS Network Operations
This section pertains to an OpenVMS node communicating with an MS–DOS node. The discussion focuses on file operations initiated from the OpenVMS node, to access remote files by means of FAL at the MS–DOS node.
9.9.1. File System Constraints
The file systems used by MS–DOS and OpenVMS are dissimilar in many respects. A fundamental difference between them involves the handling of file attribute information. When you create a file on a OpenVMS operating system, attribute information about the file is stored in a header block on disk for use when the file is subsequently opened. The implication is that the structure of an established file cannot change. In contrast, MS–DOS does not save attribute information such as file format with a file; it expects you to provide this information when you open the file. File attribute information, however, is not an input to OpenVMS RMS when a file is opened.
To provide transparent access to files on a remote MS–DOS system, OpenVMS RMS restricts the types of file that you can create and open on the remote node. When you access an MS–DOS file in record mode, OpenVMS RMS treats the file as having stream format.
9.9.1.1. File Formats and Access Modes
- File organizations and record formats
Sequential
Fixed length (FIX) without implied carriage control
Stream_CR (STMCR)
Stream_LF (STMLF)
Variable length (VAR) without implied carriage control
Variable with fixed control (VFC)
Relative
All formats
Indexed
All formats
- Record attributes
- FORTRAN carriage control (FTN)
- Print file carriage control (PRN)
- None specified (embedded carriage control)
- Record access modes
- Random access by relative record number
- Random access by key value
- Random access by record file address
For record mode access, the only file type in common between the two systems is a sequential file in STM (stream) format. For convenience, however, when you are transferring a file to an MS–DOS node, OpenVMS RMS automatically converts a OpenVMS sequential file with fixed or variable format and implied carriage control to a sequential file with stream format and embedded carriage control. This automatic conversion is performed during a file create operation, and OpenVMS RMS returns an alternate success code (RMS$_CVT_STM) to indicate that the file format has been modified.
Note also that when a stream format file is retrieved from an MS–DOS node, OpenVMS RMS automatically changes the record attribute from embedded carriage control to implied carriage control.
$ CONVERT/FDL=STM.FDL input-file output-file
FILE ORGANIZATION sequential
RECORD FORMAT stream
CARRIAGE_CONTROL noneThe CONVERT command and associated FDL control file transform the input file to stream format with embedded carriage control and then copy it to the remote node according to the output file specification.
9.9.1.2. OpenVMS RMS Interface
- OpenVMS RMS service calls
$DELETE
$DISPLAY
$EXTEND
$FIND
$FREE
$RELEASE
$RENAME
$REWIND
$TRUNCATE
$UPDATE
$WRITE
- RMS extended attribute blocks
- Allocation XAB
- Key Definition XAB
- Summary XAB
- Significant fields and bit options of the FAB
- ALQ (allocation quantity) field
- DEQ (default extend quantity) field
- CBT (contiguous-best-try) bit of FOP field
9.9.1.3. File Specifications
node::"device:\directory\name"
\directory\
As a result, use quoted strings when you access these MS–DOS files from an OpenVMS operating system.
$ DIRECTORY PC::[REPORT]
$ DIRECTORY PC::\report\*.*
MS–DOS file specifications are restricted to file names of eight characters, file extensions of three characters, and do not support version numbers.
9.9.2. DCL Considerations
ANALYZE/RMS_FILE
APPEND
BACKUP
OPEN/WRITE
RENAME
9.9.2.1. COPY
The /ALLOCATION and /EXTENSION qualifiers to the COPY command are not supported and are ignored if specified.
9.9.2.2. DIRECTORY
The file owner identifier is displayed as [0,0] to indicate that this information is not available.
The file ID identifier is displayed as NONE to indicate that this information is not available.
The file attributes version limit identifier is displayed as 0 to indicate that this information is not available.
The file REVISION number is not shown and file REVISION date and time information is not available from the MS–DOS operating system.
9.10. OpenVMS to ULTRIX Network Operations
This section pertains to a OpenVMS node communicating with an ULTRIX node running DECnet–ULTRIX Version 1.0. The discussion focuses on file operations initiated from the OpenVMS node, to access remote files by means of the FAL at the ULTRIX node.
9.10.1. File System Constraints
The file systems used by ULTRIX and OpenVMS are dissimilar in many respects. A fundamental difference between them involves the handling of file attribute information. When you create a file on a OpenVMS operating system, attribute information about the file is stored in a header block on disk for use when the file is subsequently opened. The implication is that the structure of an established file cannot change. In contrast, ULTRIX does not save attribute information such as file format with a file; it expects you to provide this information when you open the file. File attribute information, however, is not an input to OpenVMS RMS when a file is opened.
To provide transparent access to files on a remote ULTRIX operating system, VMSRMS restricts the types of file that you can create and open on the remote node. When you access an ULTRIX file in record mode, OpenVMS RMS treats the file as having STREAM_LF (STMLF) format.
9.10.1.1. File Formats and Access Modes
- File organizations and record formats
Sequential
Fixed length (FIX) without implied carriage control
Stream_CR (STMCR)
Stream (STM)
Variable length (VAR) without implied carriage control
Variable with fixed control (VFC)
Relative
All formats
Indexed
All formats
- Record attributes
- FORTRAN carriage control (FTN)
- Print file carriage control (PRN)
- None specified (embedded carriage control)
- Record access modes
- Random access by relative record number
- Random access by key value
- Random access by record file address
- Block I/O
For record mode access, the only file type in common between the two systems is a sequential file in STMLF (STREAM_LF) format. For convenience, however, when you are transferring a file to an ULTRIX node, OpenVMS RMS automatically converts a OpenVMS sequential file with fixed or variable format and implied carriage control to a sequential file with stream format and embedded carriage control. This automatic conversion is performed during a file create operation, and OpenVMS RMS returns an alternate success code (RMS$_CVT_STM) to indicate that the file format has been modified.
Note also that when a STREAM-LF format file is retrieved from an ULTRIX node, OpenVMS RMS automatically changes the record attribute from embedded carriage control to implied carriage control.
$ CONVERT/FDL=STMLF.FDL input-file output-file
FILE ORGANIZATION sequential
RECORD FORMAT Stream_LF
CARRIAGE_CONTROL noneThe CONVERT command and associated FDL control file transform the input file to stream format with embedded carriage control and then copy it to the remote node according to the output file specification.
9.10.1.2. OpenVMS RMS Interface
- OpenVMS RMS service calls
$DELETE
$DISPLAY
$EXTEND
$FIND
$FREE
$RELEASE
$RENAME
$REWIND
$TRUNCATE
$UPDATE
- RMS extended attribute blocks
- Allocation XAB
- Key Definition XAB
- Summary XAB
- Significant fields and bit options of the FAB
- ALQ (allocation quantity) field
- DEQ (default extend quantity) field
- CBT (contiguous-best-try) bit of FOP field
9.10.1.3. File Specifications
node::name
No explicit device names are allowed. Instead, ULTRIX has a concept of special files.
File names on ULTRIX are case sensitive (uppercase or lowercase).
Because of these differences, most accesses to an ULTRIX operating system require a foreign file specification. Without the foreign file specification syntax, the name is converted to uppercase by OpenVMS, and is then unlikely to match files on the ULTRIX operating system. The OpenVMS concepts of device and directory do not match the ULTRIX concept of path, nor does ULTRIX support separate file type or version fields. Therefore, OpenVMS-related name processing does not work with ULTRIX file names.
9.10.2. DCL Considerations
ANALYZE/RMS_FILE
BACKUP
OPEN/WRITE
RENAME
9.10.2.1. COPY
The /ALLOCATION and /EXTENSION qualifiers to the COPY command are not supported and are ignored if specified.
9.10.2.2. DIRECTORY
The file owner is displayed as [0,0] to indicate that this information is not available.
The file REVISION number is not shown and file REVISION date and time information is not available from the ULTRIX operating system.
9.11. OpenVMS to IBM Network Operations
This section pertains to an OpenVMS node communicating with an IBM MVS or an IBM VM operating system.
To perform file operations, you must install DECnet/SNA Data Transfer Facility server (VMS/DTF server) software on any OpenVMS system in a DECnet network containing a DECnet/SNA Gateway or on any OpenVMS system running VMS/SNA.
The node that is running the VMS/DTF server software is referred to as the server node. All DTF file requests go through this server node which communicates with the appropriate DTF for IBM system by using a DECnet/SNA Gateway or by using VMS/SNA software.
DECnet/SNA Data Transfer Facility for IBM MVS (DTF for MVS). This software is installed on the MVS node.
DECnet/SNA Data Transfer Facility for IBM VM (DTF for VM) software. This software is installed on the VM node.
You can install the optional DECnet/SNA Data Transfer Facility utilities (VMS/DTF utilities) software on any OpenVMS system where users wish to transfer files using the recoverable copy feature.
The following discussion focuses on file operations initiated from the OpenVMS node, to access remote files on the MVS or VM operating system.
The following sections provide an overview about which file operations are possible and which are not. For a more detailed discussion, refer to the DTF documentation set.
9.11.1. File System Constraints
The DECnet/SNA Data Transfer Facility (DTF) software causes IBM datasets to appear to the OpenVMS operating system as remote RMS files that you can access using RMS calls or utilities (such as COPY) that are layered upon RMS. The underlying differences in the file systems used by IBM and OpenVMS impose a number of constraints on accessing IBM files.
9.11.1.1. File Formats and Access Modes
- File organization and record format
Sequential
Stream (STM)
Stream_CR (STMCR)
Stream_LF (STMLF)
Undefined (UDF)
Variable with fixed control (VFC). When creating a dataset on the IBM operating system, you may specify VFC format if you also specify the record attribute PRINT CARRIAGE_CONTROL. When this dataset is subsequently opened by RMS, it has record format VARIABLE and a record attribute of CARRIAGE_RETURNCARRIAGE_CONTROL. If this dataset is copied back to a OpenVMS operating system, the resultant OpenVMS file has similar attributes; that is, the FAB$C_VFC FAB$V_PRN options are transformed to FAB$C_VAR and FAB$V_CR.
Relative
All formats
Indexed
All formats
- Record attributes
- No carriage control. You must specify either FAB$V_CR, FAB$V_FTN or FAB$V_PRN when creating a dataset on the IBM operating system.
- Record access modes
- Random access by relative record number
- Random access by key value
- Random access by record file address
- Block I/O
BSAM (Basic Sequential Access Method)
QSAM (Queued Sequential Access Method)
These IBM sequential files appear to OpenVMS as RMS sequential files. Partitioned Dataset (PDS) members (MVS) also appear to OpenVMS as RMS sequential files. Supported VSAM file types include: ESDS, RRDS, and KSDS. For VM systems, normal CMS sequential files, as well as MACLIB files are supported. Refer to the DTF Software Product Description (SPD) for complete details on IBM file support.
Files that you cannot copy to or from the IBM operating system using the DCL COPY command, because of the previously mentioned constraints, can be copied using the DCL CONVERT command and a suitable FDL control file. The CONVERT command and associated FDL control file transform the input file to a format supported by the remote IBM system by the DTF software.
For record mode access, the only file organization in common between the two systems is a sequential file.
9.11.1.2. OpenVMS RMS Interface
- OpenVMS RMS service calls
$DELETE
$ENTER
$EXTEND
$FIND
$FLUSH
$FREE
$NXTVOL
$READ
$RELEASE
$REMOVE
$RENAME
$REWIND
$SPACE
$TRUNCATE
$UPDATE
$WRITE
- RMS extended attribute blocks
- Key Definition XAB
- Protection XAB
- Revision Date and Time XAB
- Summary XAB
9.11.1.3. File Specifications
DTF-server-node"SNADTF"::"aaa.bbb.ccc.../qual1:val1/qual2:val2..."
DTF-server-node"SNADTF"::"aaa.bbb.ccc...(ddd)/qual1:val1/qual2:val2..."
9.11.2. DCL Considerations
LIBRARIAN
LINK
RENAME
9.12. OpenVMS to OpenVMS Network Operations
This section pertains to file operations initiated on an OpenVMS node where the remote system is a OpenVMS node running a version of DECnet VAX prior to Version 5.0.
- File organization and record format
Indexed
With collating (COL) key type
With descending collating (DCOL) key type
VAX specific.
VAX specific
You can perform operations requiring access to the permanent database without the SYSPRV privilege if you have read and write access to all configuration database files or hold BYPASS privilege. However, VSI recommends that you protect these network configuration files from unauthorized access by requiring SYSPRV to access these files.
VAX specific
This operation represents the minimum subset for transparent task-to-task communication.